
【Verilog】7.2.1 Verilog 并行 FIR 滤波器设计_并行滤波器verilog
赞
踩
FIR(Finite Impulse Response)滤波器是一种有限长单位冲激响应滤波器,又称为非递归型滤波器。
FIR 滤波器具有严格的线性相频特性,同时其单位响应是有限长的,因而是稳定的系统,在数字通信、图像处理等领域都有着广泛的应用。
FIR 滤波器原理
FIR 滤波器是有限长单位冲击响应滤波器。直接型结构如下:

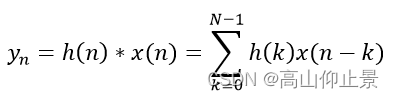
FIR 滤波器本质上就是输入信号与单位冲击响应函数的卷积,表达式如下:
FIR 滤波器有如下几个特性:
(1) 响应是有限长序列。
(2) 系统函数在 |z| > 0 处收敛,极点全部在 z=0 处,属于因果系统。
(3) 结构上是非递归的,没有输出到输入的反馈。
(4) 输入信号相位响应是线性的,因为响应函数 h(n) 系数是对称的。
(5) 输入信号的各频率之间,相对相位差也是固定不变的。
(6) 时域卷积等于频域相乘,因此该卷积相当于筛选频谱中各频率分量的增益倍数。某些频率分量保留,某些频率分量衰减,从而实现滤波的效果。
并行 FIR 滤波器设计
设计说明
输入频率为 7.5 MHz 和 250 KHz 的正弦波混合信号,经过 FIR 滤波器后,高频信号 7.5MHz 被滤除,只保留 250KHz 的信号。设计参数如下:
输入频率: 7.5MHz 和 250KHz
采样频率: 50MHz
阻带: 1MHz ~ 6MHz
阶数: 15(N-1=15)
- 1
- 2
- 3
- 4
由 FIR 滤波器结构可知,阶数为 15 时,FIR 的实现需要 16 个乘法器,15 个加法器和 15 组延时寄存器。为了稳定第一拍的数据,可以再多用一组延时寄存器,即共用 16 组延时寄存器。由于 FIR 滤波器系数的对称性,乘法器可以少用一半,即共使用 8 个乘法器。
并行设计,就是在一个时钟周期内对 16 个延时数据同时进行乘法、加法运算,然后在时钟驱动下输出滤波值。这种方法的优点是滤波延时短,但是对时序要求比较高。
并行设计
设计中使用到的乘法器模块代码,可参考之前流水线式设计的乘法器。
为方便快速仿真,也可以直接使用乘号 * 完成乘法运算,设计中加入宏定义 SAFE_DESIGN 来选择使用哪种乘法器。
FIR 滤波器系数可由 matlab 生成,具体见附录。
/*********************************************************** >> V201001 : Fs:50Mhz, fstop:1Mhz-6Mhz, order: 15 ************************************************************/ `define SAFE_DESIGN module fir_guide ( input rstn, //复位,低有效 input clk, //工作频率,即采样频率 input en, //输入数据有效信号 input [11:0] xin, //输入混合频率的信号数据 output valid, //输出数据有效信号 output [28:0] yout //输出数据,低频信号,即250KHz ); //data en delay reg [3:0] en_r ; always @(posedge clk or negedge rstn) begin if (!rstn) begin en_r[3:0] <= 'b0 ; end else begin en_r[3:0] <= {en_r[2:0], en} ; end end //(1) 16 组移位寄存器 reg [11:0] xin_reg[15:0]; reg [3:0] i, j ; always @(posedge clk or negedge rstn) begin if (!rstn) begin for (i=0; i<15; i=i+1) begin xin_reg[i] <= 12'b0; end end else if (en) begin xin_reg[0] <= xin ; for (j=0; j<15; j=j+1) begin xin_reg[j+1] <= xin_reg[j] ; //周期性移位操作 end end end //Only 8 multipliers needed because of the symmetry of FIR filter coefficient //(2) 系数对称,16个移位寄存器数据进行首位相加 reg [12:0] add_reg[7:0]; always @(posedge clk or negedge rstn) begin if (!rstn) begin for (i=0; i<8; i=i+1) begin add_reg[i] <= 13'd0 ; end end else if (en_r[0]) begin for (i=0; i<8; i=i+1) begin add_reg[i] <= xin_reg[i] + xin_reg[15-i] ; end end end //(3) 8个乘法器 // 滤波器系数,已经过一定倍数的放大 wire [11:0] coe[7:0] ; assign coe[0] = 12'd11 ; assign coe[1] = 12'd31 ; assign coe[2] = 12'd63 ; assign coe[3] = 12'd104 ; assign coe[4] = 12'd152 ; assign coe[5] = 12'd198 ; assign coe[6] = 12'd235 ; assign coe[7] = 12'd255 ; reg [24:0] mout[7:0]; `ifdef SAFE_DESIGN //流水线式乘法器 wire [7:0] valid_mult ; genvar k ; generate for (k=0; k<8; k=k+1) begin mult_man #(13, 12) u_mult_paral ( .clk (clk), .rstn (rstn), .data_rdy (en_r[1]), .mult1 (add_reg[k]), .mult2 (coe[k]), .res_rdy (valid_mult[k]), //所有输出使能完全一致 .res (mout[k]) ); end endgenerate wire valid_mult7 = valid_mult[7] ; `else //如果对时序要求不高,可以直接用乘号 always @(posedge clk or negedge rstn) begin if (!rstn) begin for (i=0 ; i<8; i=i+1) begin mout[i] <= 25'b0 ; end end else if (en_r[1]) begin for (i=0 ; i<8; i=i+1) begin mout[i] <= coe[i] * add_reg[i] ; end end end wire valid_mult7 = en_r[2]; `endif //(4) 积分累加,8组25bit数据 -> 1组 29bit 数据 //数据有效延时 reg [3:0] valid_mult_r ; always @(posedge clk or negedge rstn) begin if (!rstn) begin valid_mult_r[3:0] <= 'b0 ; end else begin valid_mult_r[3:0] <= {valid_mult_r[2:0], valid_mult7} ; end end `ifdef SAFE_DESIGN //加法运算时,分多个周期进行流水,优化时序 reg [28:0] sum1 ; reg [28:0] sum2 ; reg [28:0] yout_t ; always @(posedge clk or negedge rstn) begin if (!rstn) begin sum1 <= 29'd0 ; sum2 <= 29'd0 ; yout_t <= 29'd0 ; end else if(valid_mult7) begin sum1 <= mout[0] + mout[1] + mout[2] + mout[3] ; sum2 <= mout[4] + mout[5] + mout[6] + mout[7] ; yout_t <= sum1 + sum2 ; end end `else //一步计算累加结果,但是实际中时序非常危险 reg signed [28:0] sum ; reg signed [28:0] yout_t ; always @(posedge clk or negedge rstn) begin if (!rstn) begin sum <= 29'd0 ; yout_t <= 29'd0 ; end else if (valid_mult7) begin sum <= mout[0] + mout[1] + mout[2] + mout[3] + mout[4] + mout[5] + mout[6] + mout[7]; yout_t <= sum ; end end `endif assign yout = yout_t ; assign valid = valid_mult_r[0]; endmodule

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
testbench
testbench 编写如下,主要功能就是不间断连续的输入 250KHz 与 7.5MHz 的正弦波混合信号数据。输入的混合信号数据也可由 matlab 生成,具体见附录。
`timescale 1ps/1ps module test ; //input reg clk ; reg rst_n ; reg en ; reg [11:0] xin ; //output wire valid ; wire [28:0] yout ; parameter SIMU_CYCLE = 64'd2000 ; //50MHz 采样频率 parameter SIN_DATA_NUM = 200 ; //仿真周期 //===================================== // 50MHz clk generating localparam TCLK_HALF = 10_000; initial begin clk = 1'b0 ; forever begin # TCLK_HALF ; clk = ~clk ; end end //============================ // reset and finish initial begin rst_n = 1'b0 ; # 30 rst_n = 1'b1 ; # (TCLK_HALF * 2 * SIMU_CYCLE) ; $finish ; end //======================================= // read signal data into register reg [11:0] stimulus [0: SIN_DATA_NUM-1] ; integer i ; initial begin $readmemh("../tb/cosx0p25m7p5m12bit.txt", stimulus) ; i = 0 ; en = 0 ; xin = 0 ; # 200 ; forever begin @(negedge clk) begin en = 1'b1 ; xin = stimulus[i] ; if (i == SIN_DATA_NUM-1) begin //周期送入数据控制 i = 0 ; end else begin i = i + 1 ; end end end end fir_guide u_fir_paral ( .xin (xin), .clk (clk), .en (en), .rstn (rst_n), .valid (valid), .yout (yout)); endmodule
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
仿真结果
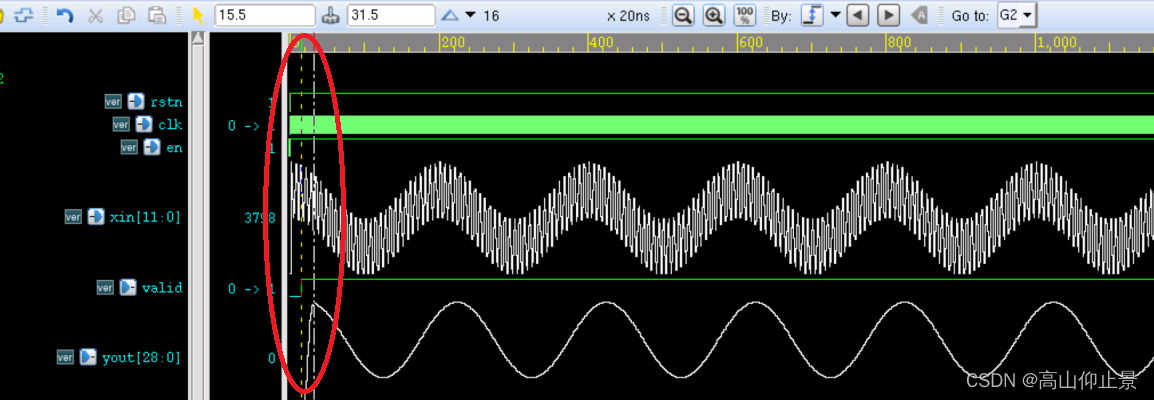
由下图仿真结果可知,经过 FIR 滤波器后的信号只有一种低频率信号(250KHz),高频信号(7.5MHz)被滤除了。而且输出波形是连续的,能够持续输出。
但是,如红圈所示,波形起始部分呈不规则状态,对此进行放大。
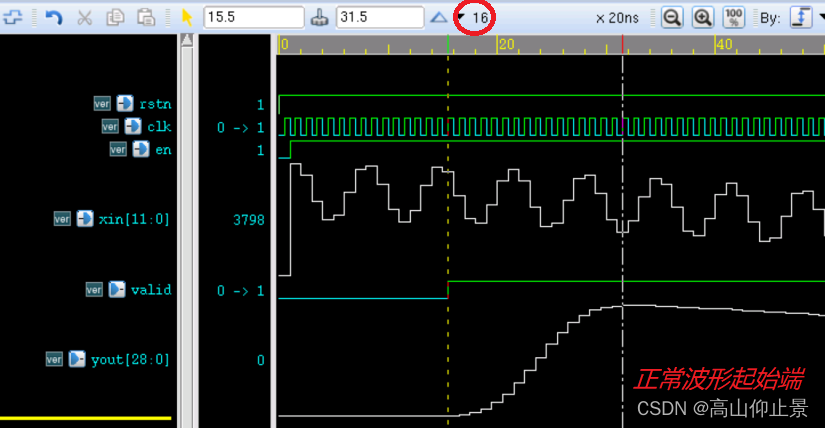
波形起始端放大后如下图所示,可见不规则波形的时间段,即两根竖线之间的时间间隔是 16 个时钟周期。
因为数据是串行输入,设计中使用了 16 组延时寄存器,所以滤波后的第一个正常点应该较第一个滤波数据输出时刻延迟 16 个时钟周期。即数据输出有效信号 valid 应该再延迟 16 个时钟周期,则会使输出波形更加完美。
附录:matlab 使用
生成 FIR 滤波器系数
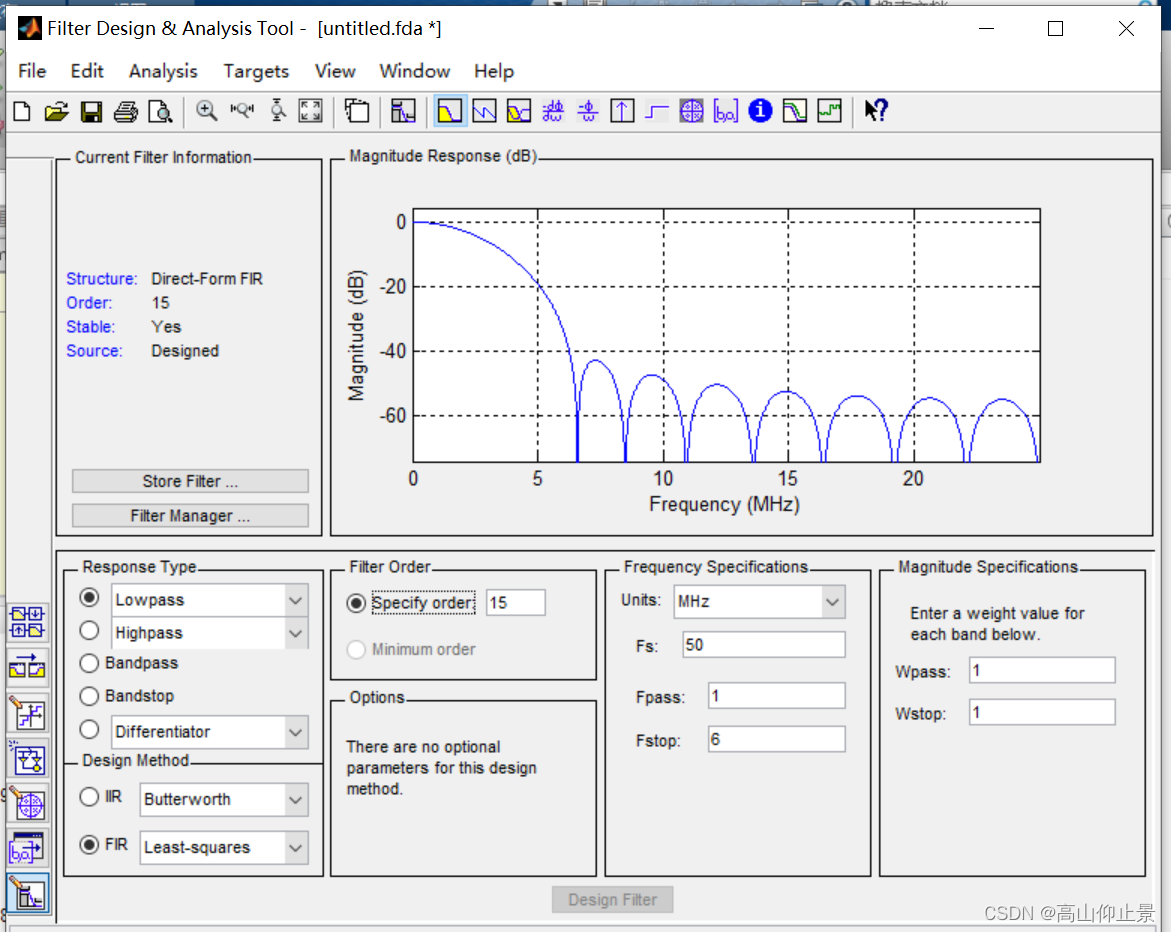
打开 matlab,在命令窗口输入命令: fdatool。
然后会打开如下窗口,按照 FIR 滤波器参数进行设置。
这里选择的 FIR 实现方法是最小二乘法(Least-squares),不同的实现方式滤波效果也不同。
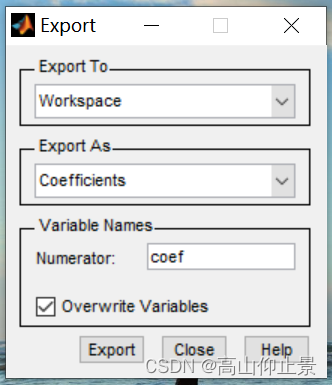
点击 File -> Export
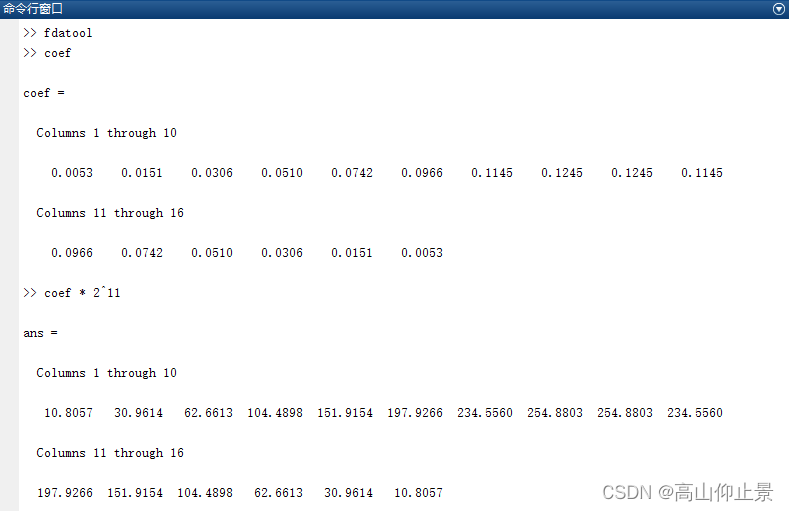
将滤波器参数输出,存到变量 coef 中,如下图所示。
此时 coef 变量应该是浮点型数据。对其进行一定倍数的相乘扩大,然后取其近似的定点型数据作为设计中的 FIR 滤波器参数。这里取扩大倍数为 2048,结果如下所示。
生成输入的混合信号
利用 matlab 生成混合的输入信号参考代码如下。
信号为无符号定点型数据,位宽宽度为 12bit,存于文件 cosx0p25m7p5m12bit.txt。
clear all;close all;clc; %======================================================= % generating a cos wave data with txt hex format %======================================================= fc = 0.25e6 ; % 中心频率 fn = 7.5e6 ; % 杂波频率 Fs = 50e6 ; % 采样频率 T = 1/fc ; % 信号周期 Num = Fs * T ; % 周期内信号采样点数 t = (0:Num-1)/Fs ; % 离散时间 cosx = cos(2*pi*fc*t) ; % 中心频率正弦信号 cosn = cos(2*pi*fn*t) ; % 杂波信号 cosy = mapminmax(cosx + cosn) ; %幅值扩展到(-1,1) 之间 cosy_dig = floor((2^11-1) * cosy + 2^11) ; %幅值扩展到 0~4095 fid = fopen('cosx0p25m7p5m12bit.txt', 'wt') ; %写数据文件 fprintf(fid, '%x\n', cosy_dig) ; fclose(fid) ; %时域波形 figure(1); subplot(121);plot(t,cosx);hold on ; plot(t,cosn) ; subplot(122);plot(t,cosy_dig) ; %频域波形 fft_cosy = fftshift(fft(cosy, Num)) ; f_axis = (-Num/2 : Num/2 - 1) * (Fs/Num) ; figure(5) ; plot(f_axis, abs(fft_cosy)) ;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30

