
热门标签
热门文章
- 1记录vue3+ts配置文件无需重新打包_vue3配置静态路径 无须重复打包
- 2unity 中 json数据一种简单解析方式_unity json hashtable
- 3解决Docker报错问题:Docker Desktop – Unexpected WSL error_docker desktop unexpected wsl error
- 4【Unity实战100例】Unity表数据解析Excel方式二_unity miniexcel
- 5【玩转幻兽帕鲁Palworld部署】2024年腾讯云、阿里云、华为云搭建幻兽帕鲁游戏联机服务器教程_腾讯云可以建帕鲁服务器吗
- 6Android利用NDK实现C++开发_ndk开发egl
- 7【ES常用查询】基于ElasticsearchRestTemplate及NativeSearchQuery的查询_java es查询elasticsearchresttemplate
- 8TensorRT8 meets Python(一)解决TensorRT8部署+升级的坑
- 9springboot集成rabbitmq手动AKC机制_channel.basicack(message.getmessageproperties().ge
- 10推荐系统多目标学习之loss权重_推荐系统的多任务学习loss计算
当前位置: article > 正文
pointnet分割自己的点云数据_三维点云分类与分割-PointNet++
作者:繁依Fanyi0 | 2024-02-22 01:12:33
赞
踩
random input dropout
一, PointNet存在的问题和作者的改进
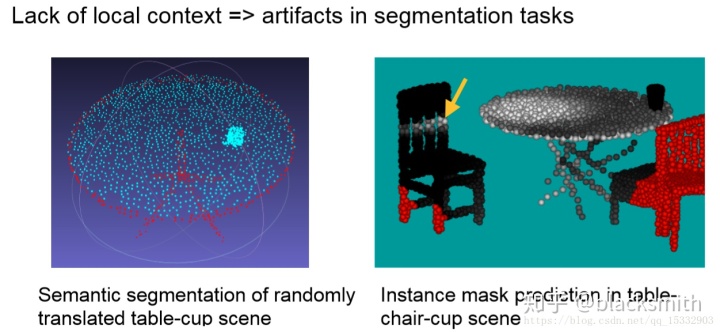
pointnet只是简单的将所有点连接起来,只考虑了全局特征,但丢失了每个点的局部信息,如下图(以点云分割为例):
改进方法:
1)利用空间距离(metric space distances),使用PointNet对点集局部区域进行特征迭代提取,使其能够学到局部尺度越来越大的特征。
2)由于点集分布很多时候是不均匀的,如果默认是均匀的,会使得网络性能变差,所以作者提出了一种自适应密度的特征提取方法
二.网络结构:
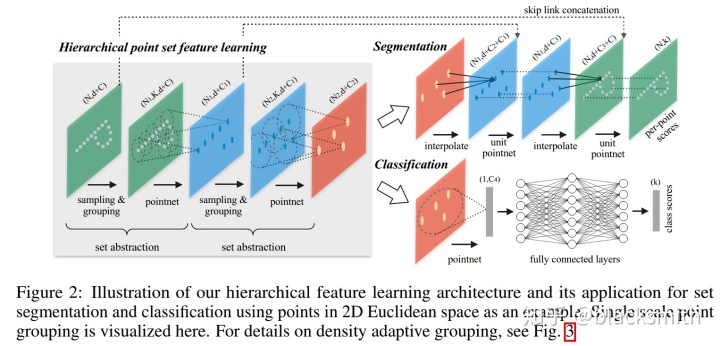
2.1 针对局部特征提取的设计思路:
PointNet++需要解决两个关键的问题:第一,如何将点集划分为不同的区域;第二,如何利用特征提取器获取不同区域的局部特征。pointnet++使用了分层抽取特征的思想,把每一次叫做set abstraction。分为三部分:采样层、分组层、特征提取层。 其中采样层和分组层解决第一个问题, 特征提取层解决第二个问题
1). 采样层(Sample layer)
首先来看采样层,为了从稠密的点云中抽取出一些相对较为重要的中心点,采用FPS(farthest point sampling)最远点采样法,这些点并不一定具有语义信息。当然也可以随机采样;文中提到相比于随机采样,这种方法能更好的的覆盖整个点集。具体选择多少个中心点,数量怎么确定,是由人来指定的。
2).组合层(Grouping layer)
在上一层提取出的中心点的某个范围内寻找最近个k近邻点组成patch;这一层使用Ball
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/127822
推荐阅读
相关标签

