
- 1存储型XSS与反射型XSS有什么区别?_存储型xss漏洞和反射型xss漏洞区别
- 2java配置多个grpc client_GrpcClient
- 3CVPR2019论文列表(中英对照)_label propagation for deep semi-supervised learnin
- 4【jellyfin】解决使用自定义域名和免费ssl证书安卓端无法访问服务器的问题_jellyfin绑定域名
- 5自定义注解对bean中属性的注入和ConvertUtils动态转化String_javabean传输redis字段转string类型的注解
- 6vue3 - Element Plus 切换主题色及el-button hover颜色不生效的解决方法_element plus 配置主题色button和input不生效
- 7pip升级安装_linuxs升级py
- 8Pycharm服务器配置与内网穿透工具结合实现远程开发的解决方法
- 9threeJS 实现加载模型 + 页面按钮交互 + 显示css2Renderer标注_css2drenderer
- 10vxe-table的常见用法_vxe-table api
[足式机器人]Part2 Dr. CAN学习笔记-Ch00-2 - 数学知识基础
赞
踩
本文仅供学习使用
本文参考:
B站:DR_CAN
《控制之美(卷1)》 王天威
《控制之美(卷2)》 王天威
Dr. CAN学习笔记-Ch00 - 数学知识基础 Part2
4. Ch0-4 线性时不变系统中的冲激响应与卷积
4.1 LIT System:Linear Time Invariant
-
运算operator : O { ⋅ } O\left\{ \cdot \right\} O{ ⋅}
I n p u t O { f ( t ) } = o u t p u t x ( t ) InputO{f(t)}=outputx(t) InputO{ f(t)}=outputx(t) -
线性——
叠加原理superpositin principle:
{ O { f 1 ( t ) + f 2 ( t ) } = x 1 ( t ) + x 2 ( t ) O { a f 1 ( t ) } = a x 1 ( t ) O { a 1 f 1 ( t ) + a 2 f 2 ( t ) } = a 1 x 1 ( t ) + a 2 x 2 ( t ) {O{f1(t)+f2(t)}=x1(t)+x2(t)O{af1(t)}=ax1(t)O{a1f1(t)+a2f2(t)}=a1x1(t)+a2x2(t) ⎩ ⎨ ⎧O{ f1(t)+f2(t)}=x1(t)+x2(t)O{ af1(t)}=ax1(t)O{ a1f1(t)+a2f2(t)}=a1x1(t)+a2x2(t) -
时不变Time Invariant:
O { f ( t ) } = x ( t ) ⇒ O { f ( t − τ ) } = x ( t − τ ) O\left\{ f\left( t \right) \right\} =x\left( t \right) \Rightarrow O\left\{ f\left( t-\tau \right) \right\} =x\left( t-\tau \right) O{ f(t)}=x(t)⇒O{ f(t−τ)}=x(t−τ)
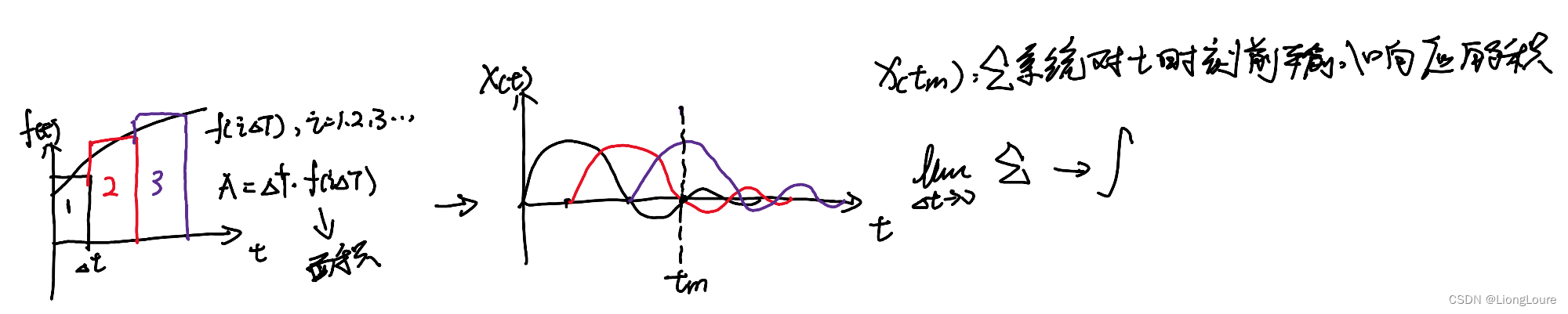
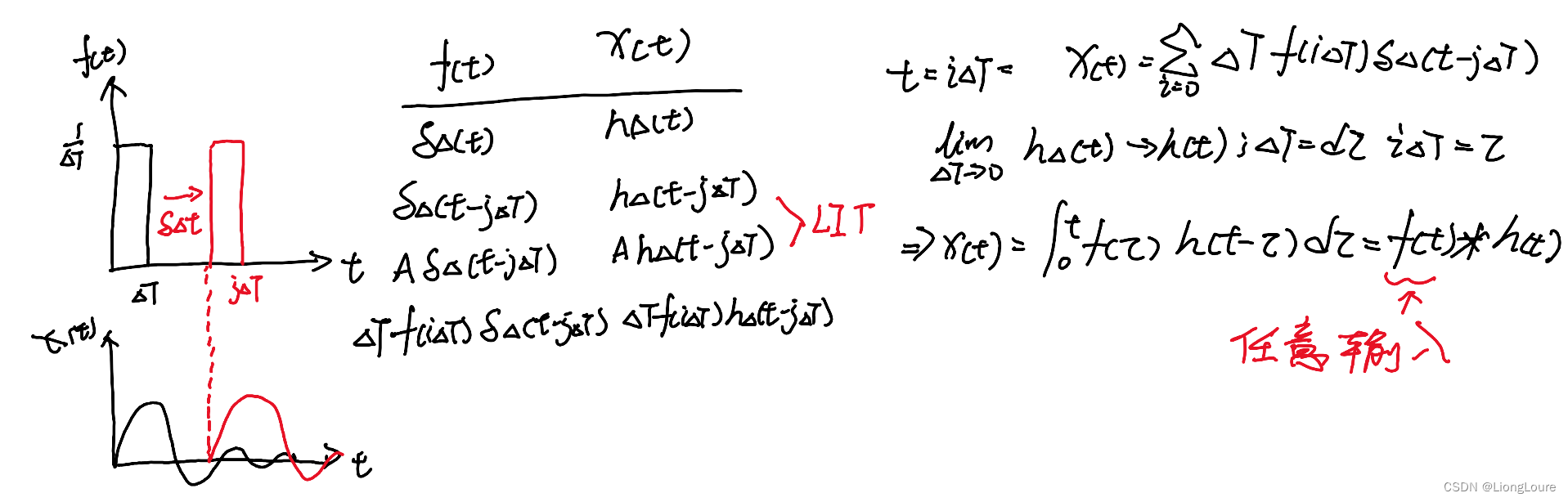
4.2 卷积 Convolution
卷积与微分方程:
- 线性时不变系统的输出与输入之间是卷积的关系
- 单位冲激响应可以完整地描述线性时不变系统。
- 微分方程可以直接描述系统输入与输出之间的卷积关系。

4.3 单位冲激 Unit Impulse——Dirac Delta
单位冲击函数(Unit Impulse),又称为狄拉克函数(Dirac Delta),是一个宽度为0、面积为1的函数,这是一个纯数学函数
LIT系统, h ( t ) h(t) h(t)可以完全定义系统, 是系统对于冲激函数δ(t)(mpulse Response) 的冲激响应

4.4 LIT 线性时不变系统状态空间方程的解
状态空间方程是指将系统描述为一组关于状态和输人的微分方程以及代表输出的代数方程的形式。
d x ( t ) d t = A x ( t ) + B u ( t ) y ( t ) = C x ( t ) + D u ( t ) \frac{\mathrm{d}x\left( t \right)}{\mathrm{d}t}=Ax\left( t \right) +Bu\left( t \right) \\ y\left( t \right) =Cx\left( t \right) +Du\left( t \right) dtdx(t)=Ax(t)+Bu(t)y(t)=Cx(t)+Du(t)
A A A是一个 n × n n\times n n×n 矩阵,表示系统状态变量之间的关系,称为状态矩阵或者系统矩阵。
B B B 是一个 n × p n\times p n×p 矩阵,表示输人对状态量的影响,称为输入矩阵或者控制矩阵。
C C C 是一个 m × n m\times n m×n 矩阵,表示系统的输出与系统状态变量的关系,称为输出矩阵。
D D D 是一个 m × p m\times p m×p 矩阵,表示系统的输人直接作用在系统输出的部分,称为直接传递矩阵。


结合前面的分析可以发现,当矩阵 A A A的特征值实部部分都小于0时,状态转移矩阵 e A ( t − t 0 ) e^{A(t-t_0)} eA(t−t0)将随着时间的增加趋向于0,这是系统稳定性分析的基础。
对于时变系统,在一般情况下不容易找到解析解,多采用数值求解的方法,这不在本书的讨论范围之内。
5. Ch0-5 Laplace Transform of Convolution卷积的拉普拉斯变换
线性时不变系统 : LIT System
冲激响应:Impluse Response
卷积:Convolution

Laplace Transform : X ( s ) = L [ x ( t ) ] = ∫ 0 ∞ x ( t ) e − s t d t X\left( s \right) =\mathcal{L} \left[ x\left( t \right) \right] =\int_0^{\infty}{x\left( t \right) e^{-st}}\mathrm{d}t X(s)=L[x(t)]=∫0∞x(t)e−stdt
Convolution : x ( t ) ∗ g ( t ) = ∫ 0 t x ( τ ) g ( t − τ ) d τ x\left( t \right) *g\left( t \right) =\int_0^t{x\left( \tau \right) g\left( t-\tau \right)}\mathrm{d}\tau x(t)∗g(t)=∫0tx(τ)g(t−τ)dτ
证明: L [ x ( t ) ∗ g ( t ) ] = X ( s ) G ( s ) \mathcal{L} \left[ x\left( t \right) *g\left( t \right) \right] =X\left( s \right) G\left( s \right) L[x(t)∗g

