
热门标签
热门文章
- 1GPT、Claude、Gemini全系列模型免费白嫖方法_chatgpt镜像
- 2谷粒商城笔记+踩坑(8)——仓库管理_谷粒商城获取spu规格
- 3用于文本去重(相似度计算)的Simhash算法学习及python实现(持续学习中)_simhash算法实例
- 4【leetcode面试经典150题】32.串联所有单词的子串(C++)
- 5【定时同步系列5】Farrow内插器结构原理和MATLAB实现_定时同步内插
- 62024年前端面试真题汇总-3月持续更新中 先收藏慢慢看!(Vue 小程序 css ES6 React 校招大厂真题、高级前端进阶等)_小程序面试题2023
- 7linux mysql dengl_mysql 高性能压力测试
- 8python绘制热力图
- 9探秘Unity ML-StableDiffusion:将AI艺术带入游戏开发的新篇章
- 10各行业都爱用什么编程语言开发?
当前位置: article > 正文
【51单片机入门记录】A/D、D/A转换器PCF859应用
作者:繁依Fanyi0 | 2024-04-13 07:43:49
赞
踩
【51单片机入门记录】A/D、D/A转换器PCF859应用
目录
一、IIC初始化代码
- 加载“iic.c文件”,主函数中添加iic.h头文件
- 调节软件延迟时长(全部扩大十倍即可)
- 编写PCF8591读写函数,并且在头文件中定义
- 编写用户用能函数
二、开发板电路图
(图源第十五届蓝桥杯电子赛资源包)
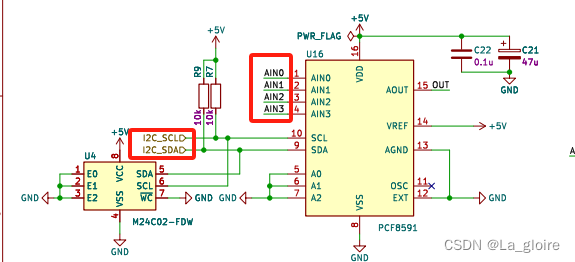
- 根据图以及前面所学的EEPROM存储器的位置,可知IIC总线上有两个设备,一个是PCF85191另一个是AT24C02 EEPROM存储器。
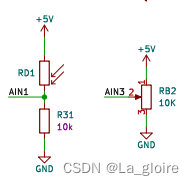
- AIN1(光敏电阻线路)、AIN3(活动变阻器、电压采集)
三、PCF8591读/写字节操作流程及相关函数
(1)PCF8591(AD)读操作流程及代码
- 主控器发出起始信号
- 主控器发出寻址字节(写:0X90)
- 被控器做出应答后
- 主控器发出控制字节(写:)
- 被控器做出应答后
- 主控器发出停止信号
- 主控器发出起始信号
- 主控器发出寻址字节(读:0x91)
- 被控器做出应答后
- 主控器从被控器读出数据字节,主控器发出应答
- 主控器发出停止信号
- unsigned char AD_read(unsigned char add)
- {
- unsigned char dat;
-
- I2CStart();
- I2CSendByte(0X90);
- I2CWaitAck();
- I2CSendByte(add);
- I2CWaitAck();
- I2CStop();
-
- I2CStart();
- I2CSendByte(0X91);
- I2CWaitAck();
- dat=I2CReceiveByte();
- I2CSendAck(1);
- I2CStop();
-
- return dat;
- }
-

(2)PCF8591(AD)写操作流程及代码
- 主控器发出起始信号
- 主控器发出寻址字节(写:0X90)
- 被控器做出应答后
- 主控器发出控制字节(写)
- 被控器做出应答后
- 主控器发出DA输出数据字节(写)
- 被控器做出应答后
- 主控器发出停止信号
- void AD_write(unsigned char dat)
- {
- I2CStart();
- I2CSendByte(0X90);
- I2CWaitAck();
- I2CSendByte(0X40);
- I2CWaitAck();
- I2CSendByte(dat);
- I2CWaitAck();
- I2CStop();
-
- }
四、应用示例-显示电压值
- //iic.c
- #include <STC15F2K60S2.H>
- #include<intrins.h>
- #define DELAY_TIME 50
-
- //总线引脚定义
- sbit sda = P2^1;
- sbit scl = P2^0;
-
- //
- static void I2C_Delay(unsigned char n)
- {
- do
- {
- _nop_();_nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();_nop_();
- _nop_();_nop_();_nop_();_nop_();_nop_();
- }
- while(n--);
- }
-
- //
- void I2CStart(void)
- {
- sda = 1;
- scl = 1;
- I2C_Delay(DELAY_TIME);
- sda = 0;
- I2C_Delay(DELAY_TIME);
- scl = 0;
- }
-
- //
- void I2CStop(void)
- {
- sda = 0;
- scl = 1;
- I2C_Delay(DELAY_TIME);
- sda = 1;
- I2C_Delay(DELAY_TIME);
- }
-
- //
- void I2CSendByte(unsigned char byt)
- {
- unsigned char i;
-
- for(i=0; i<8; i++){
- scl = 0;
- I2C_Delay(DELAY_TIME);
- if(byt & 0x80){
- sda = 1;
- }
- else{
- sda = 0;
- }
- I2C_Delay(DELAY_TIME);
- scl = 1;
- byt <<= 1;
- I2C_Delay(DELAY_TIME);
- }
-
- scl = 0;
- }
-
- //
- unsigned char I2CReceiveByte(void)
- {
- unsigned char da;
- unsigned char i;
- for(i=0;i<8;i++){
- scl = 1;
- I2C_Delay(DELAY_TIME);
- da <<= 1;
- if(sda)
- da |= 0x01;
- scl = 0;
- I2C_Delay(DELAY_TIME);
- }
- return da;
- }
-
- //
- unsigned char I2CWaitAck(void)
- {
- unsigned char ackbit;
-
- scl = 1;
- I2C_Delay(DELAY_TIME);
- ackbit = sda;
- scl = 0;
- I2C_Delay(DELAY_TIME);
-
- return ackbit;
- }
-
- //
- void I2CSendAck(unsigned char ackbit)
- {
- scl = 0;
- sda = ackbit;
- I2C_Delay(DELAY_TIME);
- scl = 1;
- I2C_Delay(DELAY_TIME);
- scl = 0;
- sda = 1;
- I2C_Delay(DELAY_TIME);
- }
-
- unsigned char AD_read(unsigned char add)
- {
- unsigned char dat;
-
- I2CStart();
- I2CSendByte(0X90);
- I2CWaitAck();
- I2CSendByte(add);
- I2CWaitAck();
- I2CStop();
-
- I2CStart();
- I2CSendByte(0X91);
- I2CWaitAck();
- dat=I2CReceiveByte();
- I2CSendAck(1);
- I2CStop();
-
- return dat;
-
- }
- void AD_write(unsigned char dat)
- {
- I2CStart();
- I2CSendByte(0X90);
- I2CWaitAck();
- I2CSendByte(0X40);
- I2CWaitAck();
- I2CSendByte(dat);
- I2CWaitAck();
- I2CStop();
-
- }
- //IIC.h
- #ifndef _IIC_H
- #define _IIC_H
- //
- static void I2C_Delay(unsigned char n);
-
- //
- void I2CStart(void);
-
- //
- void I2CStop(void);
-
- //
- void I2CSendByte(unsigned char byt);
-
- //
- unsigned char I2CReceiveByte(void);
-
- //
- unsigned char I2CWaitAck(void);
-
- //
- void I2CSendAck(unsigned char ackbit);
- //
- unsigned char AD_read(unsigned char add);
- void AD_write(unsigned char dat);
-
-
- #endif
- //main.c
- #include <STC15F2K60S2.H>
- #include<intrins.h>
- #include<IIC.h>
-
- #define uchar unsigned char
- #define uint unsigned int
-
- unsigned char LED_Bit=0XFF;
- unsigned char Actuator_Bit=0X00;
-
- #define LEDx_ON(n) { LED_Bit&=_crol_(0XFE,n-1); P0=LED_Bit; P2|=0X80; P2&=0X9F; P2&=0X1F;}
- #define LEDx_OFF(n) { LED_Bit|=_crol_(0X01,n-1); P0=LED_Bit; P2|=0X80; P2&=0X9F; P2&=0X1F;}
-
- #define Buzzer_ON Actuator_Bit|=0x40; P0=Actuator_Bit; P2|=0XA0; P2&=0XBF; P2&=0X1F;
- #define Buzzer_OFF Actuator_Bit&=0XBF; P0=Actuator_Bit; P2|=0XA0; P2&=0XBF; P2&=0X1F;
- #define Relay_ON Actuator_Bit|=0x10; P0=Actuator_Bit; P2|=0XA0; P2&=0XBF; P2&=0X1F;
- #define Relay_OFF Actuator_Bit&=0XEF; P0=Actuator_Bit; P2|=0XA0; P2&=0XBF; P2&=0X1F;
-
- unsigned char code tab[]= {0XC0,0XF9,0XA4,0XB0,0X99,0X92,0X82,0XF8,0X80,0X90,\
- 0X40,0X79,0X24,0X30,0X19,0X12,0X02,0X78,0X00,0X10,\
- 0XBF,0XFF};
- unsigned char KEY_Value = 0 ;
- unsigned char DigCom=0;
- unsigned char DigBuf[8] = {10,10,10,10,10,10,10,10};
-
- unsigned char LED = 1 ;
- unsigned int LED_tt =0;
- bit LED_Ref = 0 ;
-
- unsigned int SEG_tt =0; //定义一个数码管计数时间标识位
- bit SEG_Ref = 0 ; //定义一个数码管刷新标识位
- bit SEG_Run = 0 ; //定义一个控制数码管运行标识位
- unsigned int Num = 999 ;
-
- unsigned char Open;
-
- unsigned char EEPROM_Write[8] = {2,3,4,5,6,7,8,9};
- unsigned char EEPROM_Read[8] = {0,0,0,0,0,0,0,0};
-
- unsigned int AD_VALUE=0;
- unsigned int AD_tt =0;
- bit AD_Ref =0;
-
-
- void ALL_Init(void);
- void Delay_MS(unsigned int MS);
- void KeyScan(void);
- void ArrKeyScan(void);
- void Timer0Init(void); //1毫秒@11.0592MHz
-
- void main(void)
- {
- ALL_Init();
- Timer0Init();
- EA=1;ET0=1;
-
-
- while(1)
- {
- if(AD_Ref == 1)
- {
- AD_Ref = 0 ;
- AD_VALUE = AD_read(0X03);
- AD_write(AD_VALUE);
-
- AD_VALUE = AD_VALUE * 1.96;
- DigBuf[2]=21;DigBuf[3]=21;DigBuf[4]=21;
- DigBuf[5]=AD_VALUE/100 + 10; DigBuf[6]=AD_VALUE%100/10;
- DigBuf[7]=AD_VALUE%10;
- }
-
-
- KeyScan();
- if(KEY_Value==7){KEY_Value=0;SEG_Run = 1 ;}
- if(KEY_Value==6){KEY_Value=0;SEG_Run = 0 ;}
- if(KEY_Value==5){KEY_Value=0;LEDx_ON(1);Buzzer_ON;}
- if(KEY_Value==4){KEY_Value=0;LEDx_OFF(1);Buzzer_OFF;}
- }
- }
-
- void KeyScan(void)
- {
- if(P30==0)
- {
- Delay_MS(10);
- if(P30==0)KEY_Value = 7 ;
- while(!P30);
- }
- else if(P31==0)
- {
- Delay_MS(10);
- if(P31==0)KEY_Value = 6 ;
- while(!P31);
- }
- else if(P32==0)
- {
- Delay_MS(10);
- if(P32==0)KEY_Value = 5 ;
- while(!P32);
- }
- else if(P33==0)
- {
- Delay_MS(10);
- if(P33==0)KEY_Value = 4 ;
- while(!P33);
- }
- }
-
- void Timer0(void) interrupt 1
- {
- P0=0X00;
- P2|=0XC0; // P2=P2|0XC0; XXXX XXXX | 1100 0000 = 11XX XXXX
- P2&=0XDF; // P2=P2&0XDF; 11XX XXXX & 1101 1111 = 110X XXXX
- P2&=0X1F; //关闭所有的74HC573锁存器
-
- P0=tab[DigBuf[DigCom]];
- P2|=0XE0; // P2=P2|0XE0; XXXX XXXX | 1110 0000 = 111X XXXX
- P2&=0XFF; // P2=P2&0XDF; 11XX XXXX & 1101 1111 = 110X XXXX
- P2&=0X1F; //关闭所有的74HC573锁存器
-
- P0=(0X01<<DigCom); //然后选中第一个数码管
- P2|=0XC0; // P2=P2|0XC0; XXXX XXXX | 1100 0000 = 11XX XXXX
- P2&=0XDF; // P2=P2&0XDF; 11XX XXXX & 1101 1111 = 110X XXXX
- P2&=0X1F; //关闭所有的74HC573锁存器
-
- if(++DigCom == 8)DigCom = 0 ;
-
- LED_tt++;
- if(LED_tt == 999) {LED_tt = 0 ; LED_Ref = 1 ;}
-
- if(++SEG_tt==1000){SEG_tt=0;SEG_Ref=1;}
-
- if(++AD_tt==500){AD_tt=0;AD_Ref=1;}
- // XXX_tt++;
- // if(++XXX_tt==NNN){XXX_tt=0;XXX_Ref=1;}
- }
-
- void Timer0Init(void) //1毫秒@11.0592MHz
- {
- AUXR |= 0x80; //定时器时钟1T模式
- TMOD &= 0xF0; //设置定时器模式
- TL0 = 0xCD; //设置定时初始值
- TH0 = 0xD4; //设置定时初始值
- TF0 = 0; //清除TF0标志
- TR0 = 1; //定时器0开始计时
- }
-
-
-
- void Delay_MS(unsigned int MS)
- {
- unsigned i,j;
- for(i=0;i<MS;i++)
- for(j=853;j>0;j--); //STC15单片机设置为853; STC8H单片机修改为1109;STC32G单片机修改为427;
- }
-
- void ALL_Init(void)
- {
- P0 =0X00; //先设置关闭蜂鸣器继电器的P0输出值(全关)
- P2|=0XA0; // 将P27 P25 设置为1 其他位保持不变
- P2&=0XBF; // 将P26设置为0 其他位保持不变
- P2&=0X1F; //关闭所有的74HC573锁存器
-
- P0 =0XFF; //先设置关闭所有的LED的P0输出值(全关)
- P2|=0X80; // 将P27设置为1 其他位保持不变
- P2&=0X9F; // 将P26 P25设置为0 其他位保持不变
- P2&=0X1F; //关闭所有的74HC573锁存器
-
- P0 =0X00; //先设置选择数码管位选的P0输出值(全不选)
- P2|=0XC0; // 将P27 P26 设置为1 其他位保持不变
- P2&=0XDF; // 将P26设置为0 其他位保持不变
- P2&=0X1F; //关闭所有的74HC573锁存器
- }
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/415180
推荐阅读


相关标签

