
热门标签
热门文章
- 1Excel中Vlookup函数的使用技巧及应用实例_vlookup(d2,if({1,0},$b$2:$b$8,$a$2:$a$8),2,0)
- 2学习笔记:多示例学习(Multiple Instance Learning)_多实例学习方法
- 3HTTP3
- 4经典统计语言模型
- 5机器学习笔记(14)Transformer(三):positional encoding的理解_bert positional encoding 知乎
- 6教你怎么学JAVA+Java入门项目(可以收藏)_java学习项目
- 7Xilinx公司原语的使用方法_xilinx 原语是硬核吗
- 8数据结构 - 二叉树的遍历
- 9androidstudio旧版本下载_android studio 旧版本下载
- 10【GitHub项目推荐--7个最佳开源免费项目管理看板系统】【转载】_开源工作任务管理系统
当前位置: article > 正文
kuka机器人if逻辑编程_KUKA工业机器人基础应用 初级编程1
作者:繁依Fanyi0 | 2024-06-06 15:39:46
赞
踩
库卡机器人if指令
KUKA机器人基础应用
广汽传祺
工业机器人技师工作室
上一节我们讲解如何新建一个机器人程序并创建简单的运动指令,本节我们将对机器人的逻辑功能及变量概念进行讲解,这是机器人编程的基础。
初级编程1
●
课程重点
1、掌握机器人逻辑功能;
2、掌握机器人变量的定义及其应用。
工业机人技师工作室
1

逻辑功能


逻辑
机器人控制器的输入和输出允许机器人系统和它的外围环境进行通信。对于循环检测输入和设置输出提供特殊的指令称为逻辑指令。

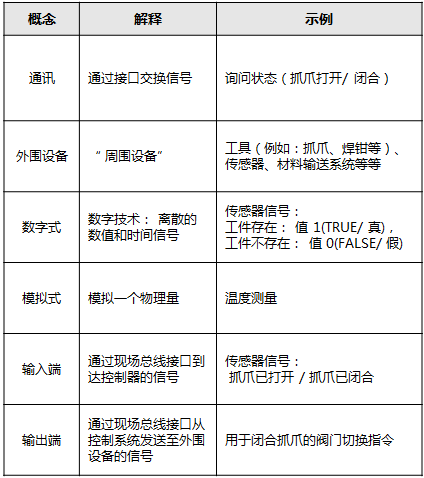
机器人主要有以下逻辑指令:
WAIT |与时间相关的等待功能, 控制器根据输入的时间在程序中的该位置上等待
WAIT FOR | 与信号有关的等待功能, 控制系统等待信号
OUT | 在程序中的某个位置上关闭输出端
计算机预进
机器人计算机预进时预先读入(操作人员不可见)运动语句,以便控制系统能够在有轨迹逼近指令时进行轨迹设计。但处理的不
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/681501
推荐阅读
相关标签

