
热门标签
热门文章
- 1【11.10】现代密码学1——密码学发展史:密码学概述、安全服务、香农理论、现代密码学_密码学的发展史
- 2直播实录|百度大脑EasyDL邀一线专家分享肿瘤识别_easydl 医疗镜检识别
- 3github无法push或clone等情况_github没有clone
- 4SpringBoot:RabbitMQ 延迟队列
- 5接口幂等性问题和常见解决方案
- 6百度文心一言怎么样?_我没有构思好,请修改或更换输入后再次尝试。
- 7python报错 ‘utf-8‘ codec can‘t encode characters in position xxxx-xxxx: surrogates not allowed_python linecache utf-8 codec can't
- 8Spark SQL优化机制_spark sql spark core
- 9都是这条路!字节跳动(抖音)软件测试工程师面试题总结_字节跳动测试面试题
- 10【Apache Spark】Spark 的基本概念和在大数据分析中的应用_apach spark 可以干什么
当前位置: article > 正文
无人机仿真XTDrone学习一:Mavros基础知识与作用
作者:繁依Fanyi0 | 2024-06-08 05:23:53
赞
踩
mavros
XTDrone等无人机仿真平台,利用ROS+Gazbo+PX4进行SITL(软件在环仿真),主要利用PX4飞控的offboard模式,在此模式下上位机程序发布期望运动,底层控制器追踪此期望运动。ROS与PX4通讯关系如下图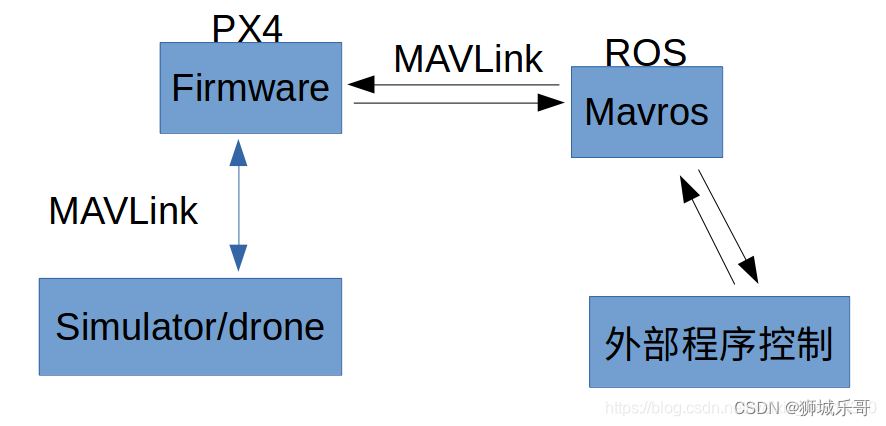 若需要进行上层开发则在ROS中编写代码,订阅或发布MAVRos话题,从而订阅无人机的状态,及发布无人机的期望位置或期望速度,px4飞控追踪此期望运动。因此无论上层控制程序多么复杂,最后都是分解成为控制无人机的位置,速度或姿态等,通过mavros发布给飞控进行跟踪。若进行底层飞控的开发,需研读px4开发手册,修改px4代码。其中MAVRos与MAVLink不需修改。因此学习MAVRos是ROS控制无人机需要首先学习的。
若需要进行上层开发则在ROS中编写代码,订阅或发布MAVRos话题,从而订阅无人机的状态,及发布无人机的期望位置或期望速度,px4飞控追踪此期望运动。因此无论上层控制程序多么复杂,最后都是分解成为控制无人机的位置,速度或姿态等,通过mavros发布给飞控进行跟踪。若进行底层飞控的开发,需研读px4开发手册,修改px4代码。其中MAVRos与MAVLink不需修改。因此学习MAVRos是ROS控制无人机需要首先学习的。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/688573
推荐阅读
相关标签

