
- 1[office] Excel中去除表格小数点后面数字的操作方法 #知识分享#学习方法
- 2动画中英文对照表(09.24)_genzox
- 3Ubuntu 20.04 升级最新内核、安装指定内核版本_ubuntu升级内核
- 4在ubuntu18.04下安装ros,以及一些踩坑总结_ubuntu18.04roscore command ‘roscore‘ not found, …
- 5狂神docker学习笔记_doc狂神笔记
- 6【java学习】ES(Elasticsearch)学习_es7.12 更新部分字段 java
- 7Android Activity的启动模式总结_com.huawei.android.launcher.unihome.unihomelaunche
- 8swiper导致图片文字变模糊_ios中swiper添加模糊,上面的内容也会模糊
- 9找出穿过最多点的直线 Max Points on a Line_在一堆点中 怎么找到经过点最多的直线 matlab
- 10docker镜像分层_docker分层
canny算子_Python图像处理OpenCV(12):Roberts算子、Prewitt算子、Sobel算子和Laplacian算子边缘检测...
赞
踩
引言
前文介绍了 Canny 算子边缘检测,本篇继续介绍 Roberts 算子、 Prewitt 算子、 Sobel 算子和 Laplacian 算子等常用边缘检测技术。
Roberts 算子
Roberts 算子,又称罗伯茨算子,是一种最简单的算子,是一种利用局部差分算子寻找边缘的算子。他采用对角线方向相邻两象素之差近似梯度幅值检测边缘。检测垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感,无法抑制噪声的影响。
1963年, Roberts 提出了这种寻找边缘的算子。 Roberts 边缘算子是一个 2x2 的模版,采用的是对角方向相邻的两个像素之差。
Roberts 算子的模板分为水平方向和垂直方向,如下所示,从其模板可以看出, Roberts 算子能较好的增强正负 45 度的图像边缘。
Roberts 算子在水平方向和垂直方向的计算公式如下:
Roberts 算子像素的最终计算公式如下:
今天的公式都是小学生水平,千万别再说看不懂了。
实现 Roberts 算子,我们主要通过 OpenCV 中的 filter2D() 这个函数,这个函数的主要功能是通过卷积核实现对图像的卷积运算:
def filter2D(src, ddepth, kernel, dst=None, anchor=None, delta=None, borderType=None)- src: 输入图像
- ddepth: 目标图像所需的深度
- kernel: 卷积核
接下来开始写代码,首先是图像的读取,并把这个图像转化成灰度图像,这个没啥好说的:
# 读取图像img = cv.imread('maliao.jpg', cv.COLOR_BGR2GRAY)rgb_img = cv.cvtColor(img, cv.COLOR_BGR2RGB)# 灰度化处理图像grayImage = cv.cvtColor(img, cv.COLOR_BGR2GRAY)然后是使用 Numpy 构建卷积核,并对灰度图像在 x 和 y 的方向上做一次卷积运算:
# Roberts 算子kernelx = np.array([[-1, 0], [0, 1]], dtype=int)kernely = np.array([[0, -1], [1, 0]], dtype=int)x = cv.filter2D(grayImage, cv.CV_16S, kernelx)y = cv.filter2D(grayImage, cv.CV_16S, kernely)注意:在进行了 Roberts 算子处理之后,还需要调用convertScaleAbs()函数计算绝对值,并将图像转换为8位图进行显示,然后才能进行图像融合:
# 转 uint8 ,图像融合absX = cv.convertScaleAbs(x)absY = cv.convertScaleAbs(y)Roberts = cv.addWeighted(absX, 0.5, absY, 0.5, 0)最后是通过 pyplot 将图像显示出来:
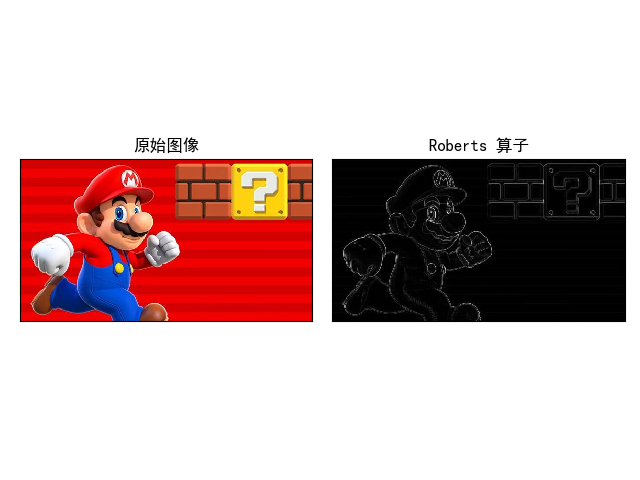
# 显示图形titles = ['原始图像', 'Roberts算子']images = [rgb_img, Roberts]for i in range(2): plt.subplot(1, 2, i + 1), plt.imshow(images[i], 'gray') plt.title(titles[i]) plt.xticks([]), plt.yticks([])plt.show()最终结果如下:
Prewitt 算子
Prewitt 算子是一种一阶微分算子的边缘检测,利用像素点上下、左右邻点的灰度差,在边缘处达到极值检测边缘,去掉部分伪边缘,对噪声具有平滑作用。
由于 Prewitt 算子采用 3 * 3 模板对区域内的像素值进行计算,而 Robert 算子的模板为 2 * 2 ,故 Prewitt 算子的边缘检测结果在水平方向和垂直方向均比 Robert 算子更加明显。Prewitt算子适合用来识别噪声较多、灰度渐变的图像。
Prewitt 算子的模版如下:
在代码实现上, Prewitt 算子的实现过程与 Roberts 算子比较相似,我就不多介绍,直接贴代码了:
import cv2 as cvimport numpy as npimport matplotlib.pyplot as plt# 读取图像img = cv.imread('maliao.jpg', cv.COLOR_BGR2GRAY)rgb_img = cv.cvtColor(img, cv.COLOR_BGR2RGB)# 灰度化处理图像grayImage = cv.cvtColor(img, cv.COLOR_BGR2GRAY)# Prewitt 算子kernelx = np.array([[1,1,1],[0,0,0],[-1,-1,-1]],dtype=int)kernely = np.array([[-1,0,1],[-1,0,1],[-1,0,1]],dtype=int)x = cv.filter2D(grayImage, cv.CV_16S, kernelx)y = cv.filter2D(grayImage, cv.CV_16S, kernely)# 转 uint8 ,图像融合absX = cv.convertScaleAbs(x)absY = cv.convertScaleAbs(y)Prewitt = cv.addWeighted(absX, 0.5, absY, 0.5, 0)# 用来正常显示中文标签plt.rcParams['font.sans-serif'] = ['SimHei']# 显示图形titles = ['原始图像', 'Prewitt 算子']images = [rgb_img, Prewitt]for i in range(2): plt.subplot(1, 2, i + 1), plt.imshow(images[i], 'gray') plt.title(titles[i]) plt.xticks([]), plt.yticks([])plt.show()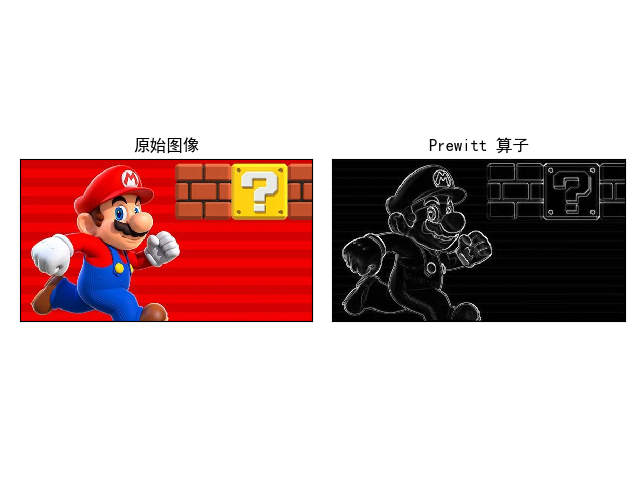
从结果上来看, Prewitt 算子图像锐化提取的边缘轮廓,其效果图的边缘检测结果比 Robert 算子更加明显。
Sobel 算子
Sobel 算子的中文名称是索贝尔算子,是一种用于边缘检测的离散微分算子,它结合了高斯平滑和微分求导。
Sobel 算子在 Prewitt 算子的基础上增加了权重的概念,认为相邻点的距离远近对当前像素点的影响是不同的,距离越近的像素点对应当前像素的影响越大,从而实现图像锐化并突出边缘轮廓。
算法模版如下:
Sobel 算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息。因为 Sobel 算子结合了高斯平滑和微分求导(分化),因此结果会具有更多的抗噪性,当对精度要求不是很高时, Sobel 算子是一种较为常用的边缘检测方法。
Sobel 算子近似梯度的大小的计算公式如下:
梯度方向的计算公式如下:
如果以上的角度 θ 等于零,即代表图像该处拥有纵向边缘,左方较右方暗。
在 Python 中,为我们提供了 Sobel() 函数进行运算,整体处理过程和前面的类似,代码如下:
import cv2 as cvimport matplotlib.pyplot as plt# 读取图像img = cv.imread('maliao.jpg', cv.COLOR_BGR2GRAY)rgb_img = cv.cvtColor(img, cv.COLOR_BGR2RGB)# 灰度化处理图像grayImage = cv.cvtColor(img, cv.COLOR_BGR2GRAY)# Sobel 算子x = cv.Sobel(grayImage, cv.CV_16S, 1, 0)y = cv.Sobel(grayImage, cv.CV_16S, 0, 1)# 转 uint8 ,图像融合absX = cv.convertScaleAbs(x)absY = cv.convertScaleAbs(y)Sobel = cv.addWeighted(absX, 0.5, absY, 0.5, 0)# 用来正常显示中文标签plt.rcParams['font.sans-serif'] = ['SimHei']# 显示图形titles = ['原始图像', 'Sobel 算子']images = [rgb_img, Sobel]for i in range(2): plt.subplot(1, 2, i + 1), plt.imshow(images[i], 'gray') plt.title(titles[i]) plt.xticks([]), plt.yticks([])plt.show()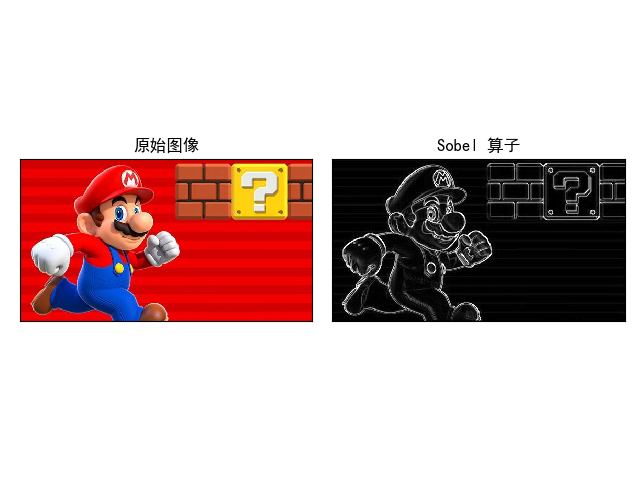
Laplacian 算子
拉普拉斯( Laplacian )算子是 n 维欧几里德空间中的一个二阶微分算子,常用于图像增强领域和边缘提取。
Laplacian 算子的核心思想:判断图像中心像素灰度值与它周围其他像素的灰度值,如果中心像素的灰度更高,则提升中心像素的灰度;反之降低中心像素的灰度,从而实现图像锐化操作。
在实现过程中, Laplacian 算子通过对邻域中心像素的四方向或八方向求梯度,再将梯度相加起来判断中心像素灰度与邻域内其他像素灰度的关系,最后通过梯度运算的结果对像素灰度进行调整。
Laplacian 算子分为四邻域和八邻域,四邻域是对邻域中心像素的四方向求梯度,八邻域是对八方向求梯度。
四邻域模板如下:
八邻域模板如下:
通过模板可以发现,当邻域内像素灰度相同时,模板的卷积运算结果为0;当中心像素灰度高于邻域内其他像素的平均灰度时,模板的卷积运算结果为正数;当中心像素的灰度低于邻域内其他像素的平均灰度时,模板的卷积为负数。对卷积运算的结果用适当的衰弱因子处理并加在原中心像素上,就可以实现图像的锐化处理。
在 OpenCV 中, Laplacian 算子被封装在 Laplacian() 函数中,其主要是利用Sobel算子的运算,通过加上 Sobel 算子运算出的图像 x 方向和 y 方向上的导数,得到输入图像的图像锐化结果。
import cv2 as cvimport matplotlib.pyplot as plt# 读取图像img = cv.imread('maliao.jpg', cv.COLOR_BGR2GRAY)rgb_img = cv.cvtColor(img, cv.COLOR_BGR2RGB)# 灰度化处理图像grayImage = cv.cvtColor(img, cv.COLOR_BGR2GRAY)# Laplaciandst = cv.Laplacian(grayImage, cv.CV_16S, ksize = 3)Laplacian = cv.convertScaleAbs(dst)# 用来正常显示中文标签plt.rcParams['font.sans-serif'] = ['SimHei']# 显示图形titles = ['原始图像', 'Laplacian 算子']images = [rgb_img, Laplacian]for i in range(2): plt.subplot(1, 2, i + 1), plt.imshow(images[i], 'gray') plt.title(titles[i]) plt.xticks([]), plt.yticks([])plt.show()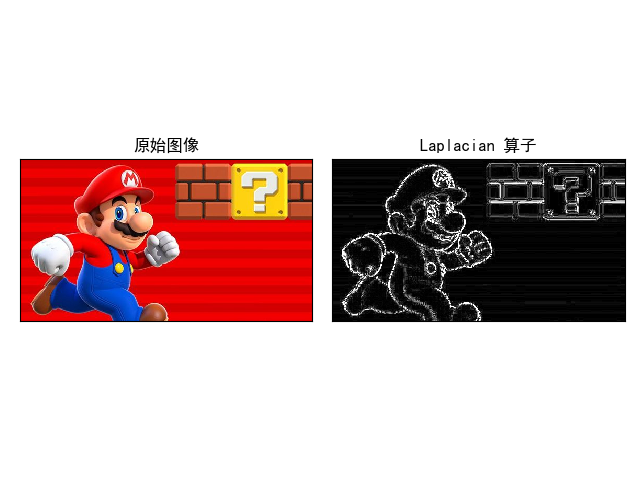
最后
边缘检测算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此需要采用滤波器来过滤噪声,并调用图像增强或阈值化算法进行处理,最后再进行边缘检测。
最后我先使用高斯滤波去噪之后,再进行边缘检测:
import cv2 as cvimport numpy as npimport matplotlib.pyplot as plt# 读取图像img = cv.imread('maliao.jpg')rgb_img = cv.cvtColor(img, cv.COLOR_BGR2RGB)# 灰度化处理图像gray_image = cv.cvtColor(img, cv.COLOR_BGR2GRAY)# 高斯滤波gaussian_blur = cv.GaussianBlur(gray_image, (3, 3), 0)# Roberts 算子kernelx = np.array([[-1, 0], [0, 1]], dtype = int)kernely = np.array([[0, -1], [1, 0]], dtype = int)x = cv.filter2D(gaussian_blur, cv.CV_16S, kernelx)y = cv.filter2D(gaussian_blur, cv.CV_16S, kernely)absX = cv.convertScaleAbs(x)absY = cv.convertScaleAbs(y)Roberts = cv.addWeighted(absX, 0.5, absY, 0.5, 0)# Prewitt 算子kernelx = np.array([[1, 1, 1], [0, 0, 0], [-1, -1, -1]], dtype=int)kernely = np.array([[-1, 0, 1], [-1, 0, 1], [-1, 0, 1]], dtype=int)x = cv.filter2D(gaussian_blur, cv.CV_16S, kernelx)y = cv.filter2D(gaussian_blur, cv.CV_16S, kernely)absX = cv.convertScaleAbs(x)absY = cv.convertScaleAbs(y)Prewitt = cv.addWeighted(absX, 0.5, absY, 0.5, 0)# Sobel 算子x = cv.Sobel(gaussian_blur, cv.CV_16S, 1, 0)y = cv.Sobel(gaussian_blur, cv.CV_16S, 0, 1)absX = cv.convertScaleAbs(x)absY = cv.convertScaleAbs(y)Sobel = cv.addWeighted(absX, 0.5, absY, 0.5, 0)# 拉普拉斯算法dst = cv.Laplacian(gaussian_blur, cv.CV_16S, ksize = 3)Laplacian = cv.convertScaleAbs(dst)# 展示图像titles = ['Source Image', 'Gaussian Image', 'Roberts Image','Prewitt Image','Sobel Image', 'Laplacian Image']images = [rgb_img, gaussian_blur, Roberts, Prewitt, Sobel, Laplacian]for i in np.arange(6): plt.subplot(2, 3, i+1), plt.imshow(images[i], 'gray') plt.title(titles[i]) plt.xticks([]), plt.yticks([])plt.show()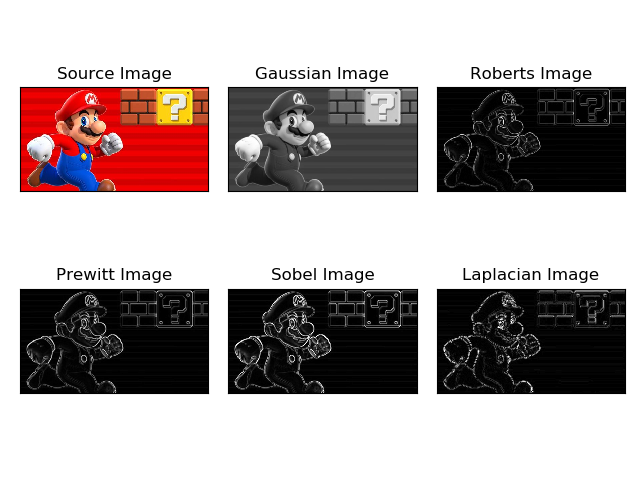
示例代码
如果有需要获取源码的同学可以在公众号回复「OpenCV」进行获取。
参考
https://blog.csdn.net/Eastmount/article/details/89001702
感谢阅读


