
热门标签
热门文章
- 1ndk cmake ‘jni.h‘ file not found 问题解决_android studio cmake jni,h not file found
- 2SpringBoot+Mybatis+微信小程序实现商城管理系统_微信小程序商城boot+微信开发者工具
- 3某商业落地充电桩后台服务器通迅协议V4.9._充电桩服务器通讯协议
- 4RSA算法详解及C语言实现
- 5国内三大云数据库测试对比
- 6关于为什么要在单处理器上使用并发程序
- 7用 gparted 在 ubuntu 上合并分区_gparted未分配怎么合并 csdn
- 8Axure RP9新手教程_axure rp9 进阶教程
- 92024美赛MCM 问题A:资源可得性和性别比例_lamprey sex ratio data
- 10运维知识AD域控基本功能介绍教程_ad域控教程
当前位置: article > 正文
机器人内部传感器阅读梳理及心得-速度传感器-数字式速度传感器
作者:羊村懒王 | 2024-02-29 16:16:33
赞
踩
机器人内部传感器阅读梳理及心得-速度传感器-数字式速度传感器
在机器人控制系统中,增量式编码器既可以作为位置传感器测量关节相对位置,又可作为速度传感器测量关节速度。当作为速度传感器时,既可以在模拟量方式下使用,又可以在数字量方式下使用。
模拟式方法
在这种方式下,需要一个频率-电压(F-V)变换器,它必须有尽量小的温度漂移和良好的零输入/输出特性,用它把编码器的脉冲频率输出转换成与转速成正比的模拟电压,它检测的是电动机轴上的瞬时速度,增量编码器用作速度传感器的示意图如图1所示。

图1 增量式编码器用作速度传感器的示意图
数字式方法
编码器是数字元件,它的脉冲个数代表了位置,而单位时间里的脉冲个数表示这段时间里的平均速度。显然,单位时间越短越能代表瞬时速度,但在太短的时间里,只能记录几个编码器脉冲,因而降低了速度分辨率。目前在技术上有多种办法可以解决这个问题。例如,采用两个编码器脉冲为一个时间间隔,然后用计数器记录在这段时间里高速脉冲源发出的脉冲个数,编码器测速原理如图2所示。

图2 编码器测速原理
设编码器每转输出1000个脉冲,高速脉冲源的周期为0.1ms,门电路每接收一个编码器脉冲就开启,再接到一个编码器脉冲就关闭,这样周而复始,也就是门电路开启时间是两个编码器脉冲的间隔时间。如计数器的计数值为100,则
编码器角位移:![]()
时间增量:∆t=脉冲源周期×计数值=0.1ms×100=10ms
速度:![]()
速度传感器思维导图如图3所示。
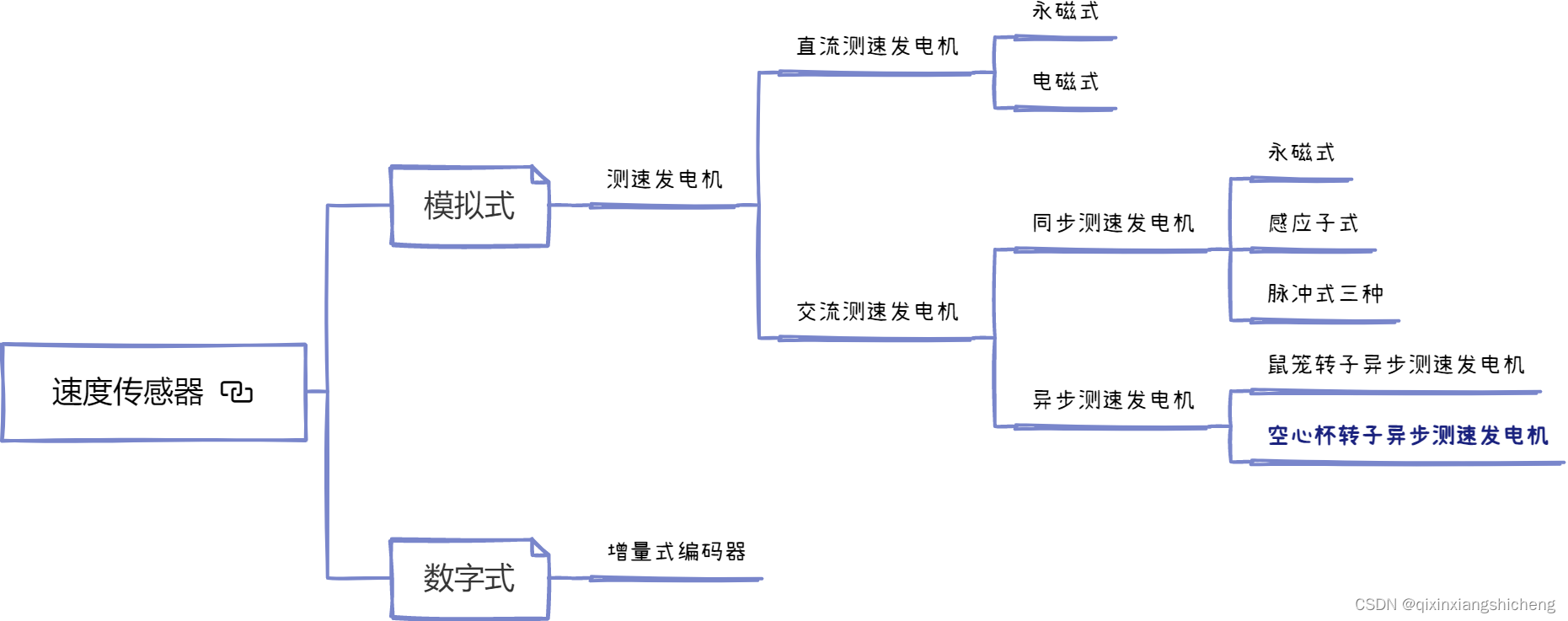
图3 速度传感器思维导图
备注:部分图来源于网络,版权归原作者所有,如有不妥,请联系作者删除或更新。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/羊村懒王/article/detail/166656
推荐阅读
相关标签

