
- 1socket调试工具、socket调试软件、tcp调试工具、tcp调试软件(sokit),C#sokit工具包及其sokit使用说明
- 2图像多尺度特征融合、特征金字塔总结
- 3求一个数组中右边第一个比他大的数(单调栈)_给定数组求出所有数右边第一个比其大的数
- 4hbuilder能不能开发鸿蒙app_hbuilderx中h5打包鸿蒙
- 5树莓派Android系统下串口GPS模块驱动_车载安卓usbgps驱动
- 6adb新手入门_either specify it explicitly with --sdk_root= or m
- 7《实战Java高并发程序设计》读书笔记一
- 8使用Xcode获取沙盒文件(模拟器和真机)_xcode 查看模拟器沙河 container
- 9Vue3 + antv/x6 实现流程图_vue x6
- 10高版本linux内核编译驱动报错记录_uses symbol kernel_write from namespace vfs_intern
安防监控实现之A9主框架的搭建_a9板采集摄像头数据
赞
踩
声明
华清远见教育集团 15年专注高端IT培训 做良心教育,做专业教育,做受人尊敬的职业教育
创客学院官网:http://www.makeru.com.cn/
华清远见创客学院嵌入式课程链接:http://www.makeru.com.cn/emb
华清远见创客学院物联网课程链接:http://www.makeru.com.cn/iot
线程
https://zhuzhongwei.blog.csdn.net/article/details/90175878
概念(意识)
- 分层意识
- 数据流
分层分析
| 层次结构 | 说明 | 数据 |
|---|---|---|
| web网页端显示部分 | 环境信息 === 实时刷新环境数据 摄像头采集图像 === 采集监控信息 硬件控制 === 下发要去控制的命令 | 环境信息: adc电压数据 、mpu6050的六轴数据 、温度 、湿度 摄像头采集图像: 硬件控制:风扇、 LED灯、蜂鸣器 、GPRS ==== 发短信或打电话 |
| A9数据处理部分 | 创建进程、线程 每条线程做自己的事情 涉及到进程间通信 数据处理===>分发(上行数据 or 下行数据) | 数据流向分析: 1、ZigBee(采集终端)–>A9(处理平台) 2、A9(处理平台)–>网页(显示平台) 3、网页(显示平台)–>A9(处理平台) 4、A9(处理平台)—>ZigBee(采集终端) |
| A9-ZigBee数据采集部分 | A9采集部分 ZigBee采集部分 (STM32平台(可以自己扩展)) |  |
| 小结 |  |
数据流分析
-
制定通信的协议(结构体):
-
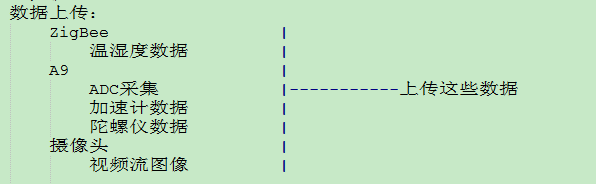
数据要怎么上传,上传的目的是为了什么?
-
数据要怎么下发,下发的目的又是为了什么?
数据的上传: ====> 共享内存上传数据 ====> 显示并交给用户查看环境信息 数据的下发用于控制硬件:====> 消息队列下发数据====> 控制硬件改变环境- 1
- 2
| 数据上传 | 数据下发 |
|---|---|
 |  |
软件层次框架图

-
项目描述:
在main程序中申请的很多线程,每个线程代表一个任务处理,进而实现多任务并发的机制。这里A9应用层程序设计为一个应用服务器,不仅要接收底层送过来的数据包,解析处理后的数据最终要送到html文件中,最后经浏览器解析展示给用户看;而且还要求能接收客户端用户发出的命令,然后进一步实现某个设定。把整个项目功能分成多个任务,有处理客户端请求线程、解析底层数据包并填充到结构体线程、处理数据并传递到网页端线程,等等。。。这么多线程,要考虑到线程之间的同步互斥机制,如何对资源进行访问。 -
目的:本文将把这种多线程处理的思想,构建成一个用户程序框架,最终实现多个线程的切换。暂时不实现上图所示的这些功能。重点是项目架构的实现。
系统框架,线程关系
-
先通过 ZigBee 模块进行实时采集环境参数,例如温度、湿度、光感数据;
-
再通过 ZigBee 协调器进行数据接收,然后把采集到的环境参数通过串口发送给 A9;
-
由 A9 的 client_request 线程负责接收环境参数或其他请求,激活数据库线程对数据库进行相应的
处理,如果是环境参数则对环境参数进行判断处理进行报警。 -
用摄像头采集图片,存储到 A9 上。
-
构建嵌入式 web 服务器,使用户通过网络利用 pc 机进行监控。
-
在 web 页面上设置控制按钮,监控设备识别用户指令并进行相应动作
-
A9 通过 GPRS 短信息功能向数据描述用户报警。
pthread_client_request():处理消息队列里请求的线程.
pthread_refresh():更新共享内存里的实时数据.
pthread_sqlite():数据库线程.
pthread_transfer ():接收数据线程…
pthread_sms():短信模块控制线程.
pthread_led():A9LED 模块线程.
pthread_camera():摄像头模块控制线程
phtread_buzzer():A9 蜂鸣器模块线程.
项目目录结构
linux@linux:/home/zzw/share/Security_Monitoring_Project$ tree -L 1 .
- 1
├── data_global.c 定义全局信息(IPC对象id和key值、条件锁、互斥锁)
├── data_global.h 一些全局变量、全局信息的声明(全局宏定义、全局函数声明、全局变量声明)
├── main.c 主线程,用于多个子线程和锁的统一申请、注销线程资源、注销消息队列 共享内存 信号量等等
├── Makefile 负责整个项目的编译
├── obj 这是一个目录,所有编译生成的中间文件在这个目录中
├── our_storage 最终编译输出的可执行文件
├── pthread_buzzer.c 线程 A9蜂鸣器控制
├── pthread_camera.c 线程 摄像头模块控制
├── pthread_client_request.c 线程 处理消息队列中的请求
├── pthread_led.c 线程 A9 LED模块
├── pthread_refresh.c 线程 更新共享内存里的实时数据
├── pthread_sms.c 线程 短信模块控制
├── pthread_sqlite.c 线程 数据库
├── pthread_transfer.c 线程 接收M0数据线程
└── sem.h 主要用于实现函数接口 对信号量的PV操作
1 directory, 14 files
数据描述
结构体描述
-
zigbee 模块对象信息参数结构体
typedef struct _makeru_zigbee_info { uint8_t head[3]; //标识位: 'm' 's' 'm' makeru-security-monitor uint8_t type; //数据类型 'z'---zigbee 'a'---a9 float temperature; //温度 float humidity; //湿度 float tempMIN; //温度下限 float tempMAX; //温度上限 float humidityMIN; //湿度下限 float humidityMAX; //湿度上限 uint32_t reserved[2]; //保留扩展位,默认填充0 //void *data; 内核预留的扩展接口 参考版 }ZIGBEE_INFO_T;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
-
A9模块对象信息参数结构体
typedef struct _makeru_a9_info { uint8_t head[3]; //标识位: 'm' 's' 'm' makeru-security-monitor uint8_t type; //数据类型 'z'---zigbee 'a'---a9 float adc; short gyrox; //陀螺仪数据 short gyroy; short gyroz; short aacx; //加速计数据 short aacy; short aacz; uint32_t reserved[2]; //保留扩展位,默认填充0 //void *data; 内核预留的扩展接口 参考版 }CROTEXA9_INFO_T;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
-
环境参数对象结构体参数
typedef struct _makeru_env_data { CROTEXA9_INFO_T a9_info; ZIGBEE_INFO_T zigbee_info; uint32_t reserved[2]; //保留扩展位,默认填充0 }ENV_DATA_T;- 1
- 2
- 3
- 4
- 5
- 6
-
所有监控区域的信息结构体
struct env_info_client_addr { ENV_DATA_T monitor_no[MONITOR_NUM]; //数组 老家---新家 }env_info_client_addr;- 1
- 2
- 3
- 4
-
设备控制对象列表
typedef enum { DEVICE_CTL_LED = 1, //LED控制 DEVICE_CTL_BUZZER = 2, //蜂鸣器控制 DEVICE_CTL_DIGITAL = 3, //四路LED灯模拟的数码管 DEVICE_CTL_FAN =4, //风扇 DEVICE_CTL_TEMP_HUMI=5, //温湿度最值设置 DEVICE_CTL_RESERVED=6, //用于个人的扩展 DEVICE_CTL_GPRS = 10, //3G通信模块-GPRS DEVICE_CTL_MAX, }DEVICE_CONTROL_LIST_E;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
全局变量描述
pthread_mutex_t mutex_client_request; pthread_mutex_t mutex_refresh; pthread_mutex_t mutex_sqlite; pthread_mutex_t mutex_transfer; pthread_mutex_t mutex_sms; pthread_mutex_t mutex_buzzer; pthread_mutex_t mutex_led; pthread_mutex_t mutex_camera; pthread_cond_t cond_client_request; pthread_cond_t cond_refresh; pthread_cond_t cond_sqlite; pthread_cond_t cond_transfer; pthread_cond_t cond_sms; pthread_cond_t cond_buzzer; pthread_cond_t cond_led; pthread_cond_t cond_camera; int msgid; //消息队列对象 id int shmid; //共享内存对象 id int semid; //信号量对象 id key_t key; //msg_key 消息队列 key_t shm_key; key_t sem_key; char recive_phone[12] = {0}; char center_phone[12] = {0}; struct env_info_client_addr sm_all_env_info; //安防监控项目所有的环境信息

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
主线程与各个子线程的搭建
主线程
#include <stdio.h> #include <pthread.h> #include <errno.h> #include <signal.h> #include <unistd.h> #include <sys/shm.h> #include <sys/sem.h> #include <sys/ipc.h> #include "data_global.h" void release_pthread_resource(int signo);//释放线程资源 extern pthread_mutex_t mutex_client_request; extern pthread_mutex_t mutex_refresh; extern pthread_mutex_t mutex_sqlite; extern pthread_mutex_t mutex_transfer; extern pthread_mutex_t mutex_sms; extern pthread_mutex_t mutex_buzzer; extern pthread_mutex_t mutex_led; extern pthread_mutex_t mutex_camera; extern pthread_cond_t cond_client_request; extern pthread_cond_t cond_refresh; extern pthread_cond_t cond_sqlite; extern pthread_cond_t cond_transfer; extern pthread_cond_t cond_sms; extern pthread_cond_t cond_buzzer; extern pthread_cond_t cond_led; extern pthread_cond_t cond_camera; extern int msgid; //消息队列对象 id extern int shmid; //共享内存对象 id extern int semid; //信号量对象 id pthread_t id_client_request; pthread_t id_refresh; pthread_t id_sqlite; pthread_t id_transfer; pthread_t id_sms; pthread_t id_buzzer; pthread_t id_led; pthread_t id_camera; int main(int argc, char const *argv[]) { //线程互斥锁初始化 pthread_mutex_init(&mutex_client_request,NULL); pthread_mutex_init(&mutex_refresh,NULL); pthread_mutex_init(&mutex_sqlite,NULL); pthread_mutex_init(&mutex_transfer,NULL); pthread_mutex_init(&mutex_sms,NULL); pthread_mutex_init(&mutex_buzzer,NULL); pthread_mutex_init(&mutex_led,NULL); pthread_mutex_init(&mutex_camera,NULL); signal (SIGINT, release_pthread_resource); //线程条件锁初始化 pthread_cond_init(&cond_client_request,NULL); pthread_cond_init(&cond_refresh,NULL); pthread_cond_init(&cond_sqlite,NULL); pthread_cond_init(&cond_transfer,NULL); pthread_cond_init(&cond_sms,NULL); pthread_cond_init(&cond_led,NULL); pthread_cond_init(&cond_camera,NULL); //线程的创建 pthread_create(&id_client_request,NULL,pthread_client_request,NULL); //线程的创建 pthread_create(&id_refresh, NULL,pthread_refresh,NULL); pthread_create(&id_sqlite, NULL,pthread_sqlite,NULL); pthread_create(&id_transfer,NULL,pthread_transfer,NULL); pthread_create(&id_sms, NULL,pthread_sms,NULL); pthread_create(&id_buzzer, NULL,pthread_buzzer,NULL); pthread_create(&id_led, NULL,pthread_led,NULL); pthread_create(&id_camera, NULL,pthread_camera,NULL); //等待线程退出 pthread_join(id_client_request,NULL); printf ("pthread1\n"); pthread_join(id_refresh,NULL); printf ("pthread2\n"); pthread_join(id_sqlite,NULL); printf ("pthread3\n"); pthread_join(id_transfer,NULL); printf ("pthread4\n"); pthread_join(id_sms,NULL); printf ("pthread5\n"); pthread_join(id_buzzer,NULL); printf ("pthread6\n"); pthread_join(id_led,NULL); printf ("pthread7\n"); pthread_join(id_camera,NULL); printf ("pthread8\n"); return 0; } void release_pthread_resource(int signo) { //释放与线程相关的资源 //释放线程锁资源 pthread_mutex_destroy (&mutex_client_request); pthread_mutex_destroy (&mutex_refresh); pthread_mutex_destroy (&mutex_sqlite); pthread_mutex_destroy (&mutex_transfer); pthread_mutex_destroy (&mutex_sms); pthread_mutex_destroy (&mutex_buzzer); pthread_mutex_destroy (&mutex_led); pthread_mutex_destroy (&mutex_camera); pthread_cond_destroy (&cond_client_request); pthread_cond_destroy (&cond_refresh); pthread_cond_destroy (&cond_sqlite); pthread_cond_destroy (&cond_transfer); pthread_cond_destroy (&cond_sms); pthread_cond_destroy (&cond_buzzer); pthread_cond_destroy (&cond_led); pthread_cond_destroy (&cond_camera); pthread_detach(id_client_request); pthread_detach(id_refresh); pthread_detach(id_sqlite); pthread_detach(id_transfer); pthread_detach(id_sms); pthread_detach(id_buzzer); pthread_detach(id_led); pthread_detach(id_camera); printf("all pthread is detached\n"); msgctl (msgid, IPC_RMID, NULL); shmctl (shmid, IPC_RMID, NULL); semctl (semid, 1, IPC_RMID, NULL); exit(0); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
各个子线程的函数
//pthread_transfer.c //接收ZigBee的数据和采集的A9平台的传感器数据 void *pthread_transfer(void *arg) { printf("pthread_analysis\n"); } //pthread_refresh.c void *pthread_refresh(void *arg) {//更新共享内存里的实时数据 printf("pthread_refresh\n"); } //pthread_led.c void *pthread_led(void *arg) {//A9 LED模块线程 printf("pthread_led\n"); } .............. ....................
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
搭建运行效果
按照程序的思路,主线程先创建各个子线程。内核调度子线程的执行,这里子线程只打印一句话就结束了。子线程执行结束后,主线程get到子线程的结束状态,然后进行线程回收。


