
- 1python016--编写代码,在用户设置新的密码时进行判断,如果小于8则让用户重新设置,如果密码里面每含有一个数字,或大写字母,小写字母,标点符号,密码位数超过10则将密码等级加1分........_编写一个程序,用户输入密码,密码长度必须大于等于8位,如果密码满足10位以上,数字
- 2云原生之Kubernetes:24、污点和容忍度详解_prefernoschedule
- 3测试开发面经总结
- 4C++ STL的锁介绍
- 5【android systrace学习】
- 6基于遗传算法的TSP算法(matlab实现)_tsp问题matlab
- 7Android中使用WebViewJavascriptBridge实现JavaScript和Java的交互_android webviewjavascriptbridge
- 8MySQL数据库——事件(七)_mysql事件状态disable
- 9用数组模拟链表_数组实现循环链表
- 10国内外人工智能AI工具网站大全(非常详细)从零基础入门到精通,看完这一篇就够了
超详细陀螺仪MPU6050模块输出姿态角(有完整版源码)_陀螺仪输出角度是多少度到多少度
赞
踩
目录标题
- 1.前言(闲话)
- 2.陀螺仪及MPU6050模块介绍(大同小异可以略过)
- Ⅰ.陀螺仪
- Ⅱ.MPU6050模块
- 3.硬件连接
- 4.软件代码————官方自带库
- 5.软件代码————其他代码
- 6.学习补充
- 7.效果展示(可以先来看这个)
- 8.参考链接
- 9.完整版代码链接
1.前言(闲话)
正在准备今年的国赛,打算做一个PID控制题目,于是就选了一个相对比较简单的风力摆,在CSDN上面搜了很多资料,但是都大同小异,没有看明白,源码也很多,但是无从下手(心酸),偶然之间看到正点原子资料里面有介绍MPU6050模块,抱着试一试的心理看完了,才明白这个道理——正点原子才是yyds。视频思路非常详细,虽然一些地方需要做一些修改,但是整体还是很清晰的,借着刚学完MPU6050的劲头,写篇博客记录一下学习过程。
2.陀螺仪及MPU6050模块介绍(大同小异可以略过)
Ⅰ.陀螺仪
陀螺仪是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置。利用其他原理制成的角运动检测装置起同样功能的也称陀螺仪。
从力学的观点近似的分析陀螺的运动时,可以把它看成是一个刚体,刚体上有一个万向支点,而陀螺可以绕着这个支点作三个自由度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运动。更确切地说,一个绕对称铀高速旋转的飞轮转子叫陀螺。将陀螺安装在框架装置上,使陀螺的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪。
陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向,制造出来的东西就叫陀螺仪。我们骑自行车其实也是利用了这个原理。轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。陀螺仪在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
Ⅱ.MPU6050模块
简介:
MPU6050内部整合了三轴MEMS陀螺仪、三轴MEMS加速度计以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),而且还可以连接一个第三方数字传感器(如磁力计),这样的话,就可以通过IIC接口输出一个9轴信号(链接第三方数字传感器才可以输出九轴信号,否则只有六轴信号)。更加方便的是,有了DMP,可以结合InvenSense公司提供的运动处理资料库,实现姿态解算。通过自带的DMP,可以通过IIC接口输出9轴融合演算的数据,大大降低了运动处理运算对操作系统的负荷,同时也降低了开发难度。其实,简单一句话说,陀螺仪就是测角速度的,加速度传感器就是测角加速度的,二者数据通过算法就可以得到PITCH、YAW、ROLL角了。
特点:
- 以数字形式输出 6 轴或 9 轴(需外接磁传感器)的旋转矩阵、四元数(quaternion)、欧拉角格式(Euler Angle forma)的融合演算数据(需 DMP 支持)
- 具有 131 LSBs/° /sec 敏感度与全格感测范围为±250、±500、±1000 与±2000° /sec的 3 轴角速度感测器(陀螺仪)
- 集成可程序控制,范围为±2g、±4g、±8g 和±16g 的 3 轴加速度传感器
- 移除加速器与陀螺仪轴间敏感度,降低设定给予的影响与感测器的飘移
- 自带数字运动处理(DMP: Digital Motion Processing)引擎可减少 MCU 复杂的融合演算数据、感测器同步化、姿势感应等的负荷
- 内建运作时间偏差与磁力感测器校正演算技术,免除了客户须另外进行校正的需求
- 自带一个数字温度传感器
- 带数字输入同步引脚(Sync pin)支持视频电子影相稳定技术与 GPS
- 可程序控制的中断(interrupt),支持姿势识别、摇摄、画面放大缩小、滚动、快速下降中断、 high-G 中断、零动作感应、触击感应、摇动感应功能
- VDD 供电电压为 2.5V±5%、 3.0V±5%、 3.3V±5%; VLOGIC 可低至 1.8V± 5%
- 陀螺仪工作电流: 5mA,陀螺仪待机电流: 5uA; 加速器工作电流:500uA,加速器省电模式电流: 40uA@10Hz
- 自带 1024 字节 FIFO,有助于降低系统功耗
- 高达 400Khz 的 IIC 通信接口
- 超小封装尺寸: 4x4x0.9mm(QFN)
MPU6050三轴角(姿态角)
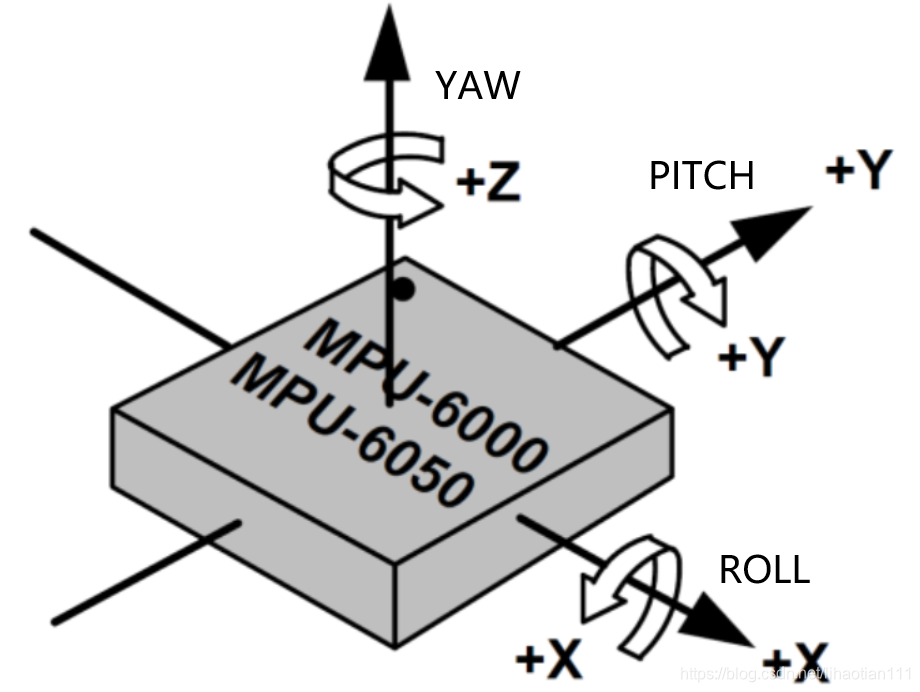
绕向即为正方向,可根据右手螺旋定则确定方向。
MPU6050框图:
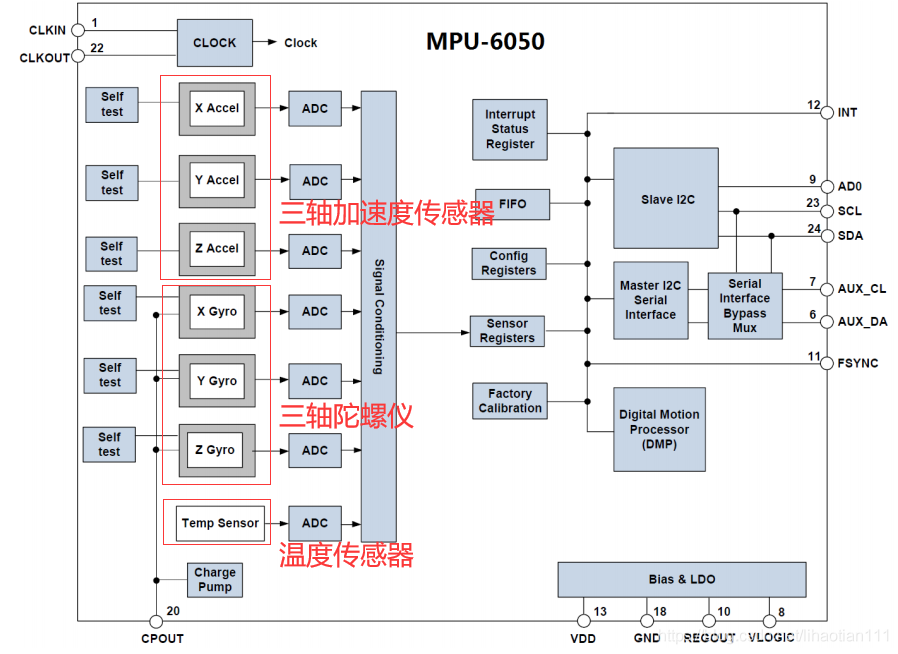 可以很清晰地观察到,MPU6050芯片中内置了三轴加速度传感器、三轴陀螺仪和一个温度传感器。右侧INT为中断输出脚,TCS为片选脚、AD0为设置地址脚、SCL和SDA为主IIC接口、AUX_CL和AUX_DA为从IIC接口,主要用到的是AD0、SCL、SDA。
可以很清晰地观察到,MPU6050芯片中内置了三轴加速度传感器、三轴陀螺仪和一个温度传感器。右侧INT为中断输出脚,TCS为片选脚、AD0为设置地址脚、SCL和SDA为主IIC接口、AUX_CL和AUX_DA为从IIC接口,主要用到的是AD0、SCL、SDA。
相关寄存器(想深入了解的朋友可以看一下)结合后面的代码更容易理解一些
①

DEVICE_RESE=1,复位MPU6050,复位完成后,自动清零。SLEEP=1,进入睡眠模式;SLEEP=0,正常工作模式。TEMP_DIS,用于设置是否使能温度传感器,设置为0,则使能CLKSEL[2:0],用于选择系统时钟源,如下所示:
| CLKSEL[2:0] | 时钟源 |
|---|---|
| 001 | 内部8M RC晶振 |
| 010 | PLL,使用X轴陀螺作为参考 |
| 011 | PLL,使用Y轴陀螺作为参考 |
| 100 | PLL,使用Z轴陀螺作为参考 |
| 101 | PLL,使用外部32.768Khz作为参考 |
| 110 | PLL,使用外部19.2Mhz作为参考 |
| 11 | 保留 |
| 001 | 关闭时钟,保持时序产生电路复位状态 |
总之,电源管理寄存器就是复位MPU6050
②

该寄存器我们只关心FS_SEL[1:0]这两个位,用于设置陀螺仪的满量程范围:0,±250°/s;1,±500°/s;2,±1000°/s;3,±2000°/s;我们一般设置为3,即±2000°/S,因为陀螺仪的ADC为16位分辨率,所以得到灵敏度为:65536/4000=16.4LSB/(°/S)。
总之,陀螺仪配置寄存器就是配置陀螺仪满量程范围,设置最大
③

该寄存器我们只关心AFS_SEL[1:0]这两个位,用于设置加速度传感器的满量程范围:0,±2g;1,±4g;2,±8g;3,±16g;我们一般设置为0,即±2g,因为加速度传感器的ADC也是16位,所以得到灵敏度为:65536/4=16384LSB/g。
总之,加速度传感器配置寄存器就是配置加速度传感器满量程范围,不宜过大
④

该寄存器用于控制FIFO使能,在简单读取传感器数据的时候,可以不用FIFO,设置对应位为:0,即可禁止FIFO,设置为1,则使能FIFO。加速度传感器的三个轴,全由一个位(ACCEL_FIFO_EN)控制,只要该位为1,则加速度传感器三个通道都开启FIFO;但是陀螺仪传感器的三个轴需要一个一个设置,即XYZ轴分别配置。
总之,FIFO使能寄存器用于控制使能FIFO(First Input First Output)
⑤

该寄存器用于设置MPU6050的陀螺仪采样频率,计算公式为:采样频率 = 陀螺仪输出频率 / (1+SMPLRT_DIV)。这里陀螺仪的输出频率,是1Khz或者8Khz,与数字低通滤波器(DLPF)的设置有关,当DLPF_CFG=0或7的时候,频率为8Khz,其他情况是1Khz。而且DLPF滤波频率一般设置为采样率的一半。采样率,我们假定设置为50Hz,那么:SMPLRT_DIV=1000/50-1=19。
总之,陀螺仪采样率分频寄存器就是用于设置陀螺仪的采样频率,如果采样频率为50Hz,那么采样周期就为1/50=20ms,即20ms采集一次陀螺仪的数据。
⑥
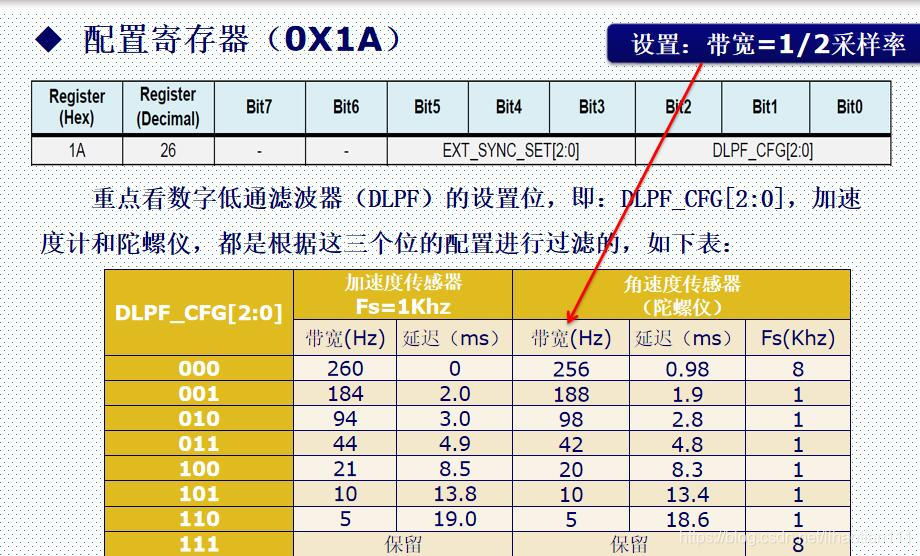
总之,配置寄存器就是设置数字低通滤波器的DLPF_CFG位来结合陀螺仪采样分频寄存器来共同设置采样周期。
⑦

该寄存器的LP_WAKE_CTRL用于控制低功耗时的唤醒频率,用不到。剩下的6位,分别控制加速度和陀螺仪的x/y/z轴是否进入待机模式,这里我们全部都不进入待机模式,所以全部设置为:0 ,即可。
总之,电源管理寄存器2就是用于设置加速度传感器和陀螺仪的X/Y/Z轴是进入休眠还是正常工作。
⑧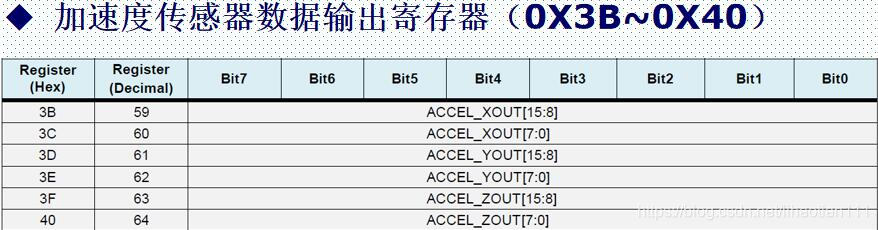
加速度传感器数据输出寄存器总共由6个寄存器组成,输出X/Y/Z三个轴的加速度传感器值,高字节在前,低字节在后。
总之,加速度传感器数据输出寄存器就是把加速度传感器测量到的数据输出出来。
⑨

陀螺仪数据输出寄存器总共由6个寄存器组成,输出X/Y/Z三个轴的陀螺仪传感器数据,高字节在前,低字节在后。
总之,陀螺仪数据输出寄存器就是把陀螺仪测量到的数据输出出来。
⑩

通过读取0X41(高8位)和0X42(低8位)寄存器得到,温度换算公式为:
Temperature = 36.53 + regval/340。其中,Temperature为计算得到的温度值,单位为℃,regval为从0X41和0X42读到的温度传感器值。
总之,温度传感器数据输出寄存器就是把温度寄存器测量到的数据处处出来。
3.硬件连接
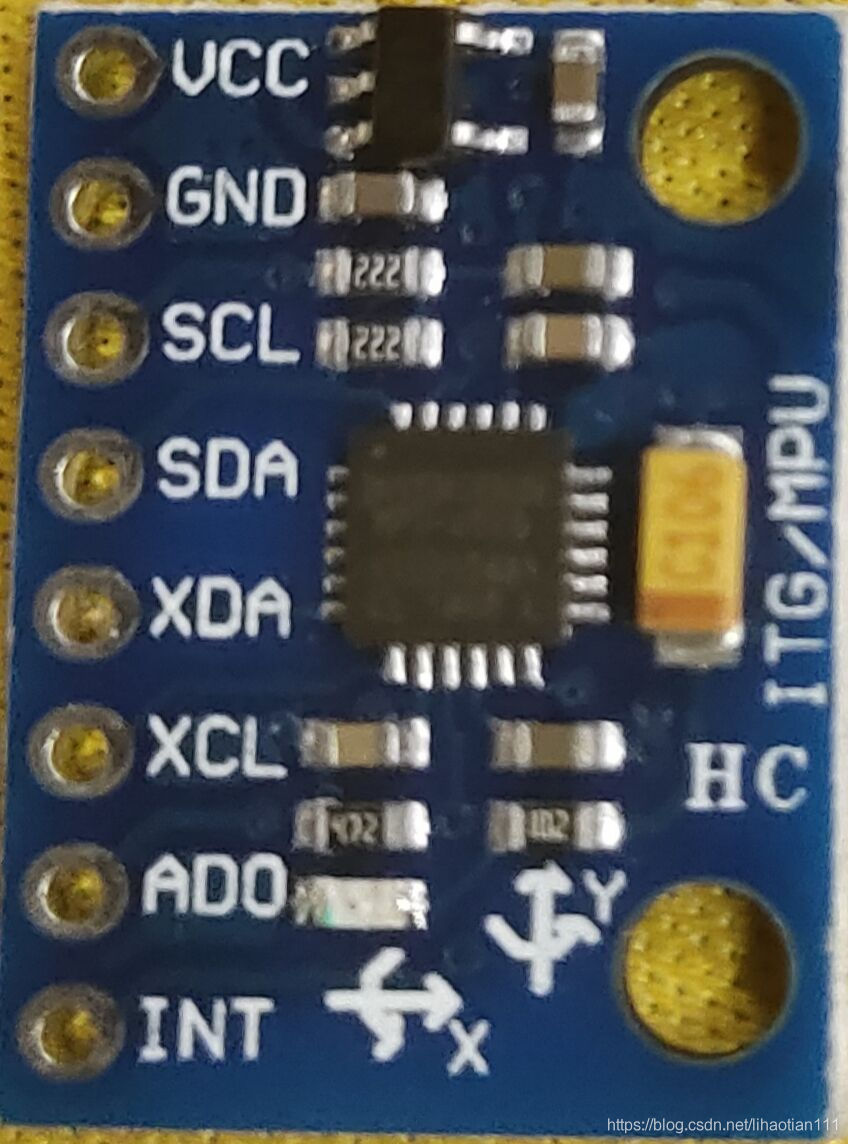
VCC:接5V电源
GND:接地
SCL:主IIC时钟线 (我接的PB10)
SDA:主IIC数据线 (我接的PB11)
AD0:地址线,接3V地址为0x68,接地地址为0x69(我接的PA15,高电平,地址为0x68)
4.软件代码————官方自带库
MPU6050处理寄存器的相关数据时需要移植几个官方库,以便将数据处理为所需要的欧拉角。正点原子共提供了五个源码,如下图:
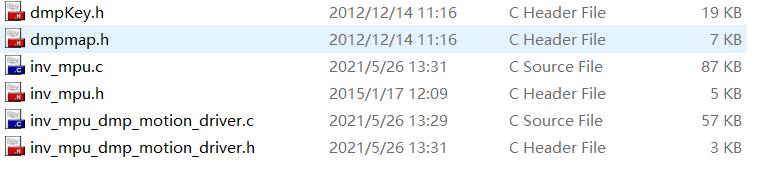
这些是需要在写MPU6050代码之前移植过来的,具体代码内容大家可以下载下方源码查看。
5.软件代码————其他代码
MPU6050.h
主要宏定义一些MPU6050寄存器的地址,方便IIC发送给寄存器数据初始化MPU6050。
#ifndef __MPU6050_H
#define __MPU6050_H
#include "mpuiic.h"
//MPU6050 AD0控制脚
#define MPU_AD0_CTRL PAout(15) //控制AD0电平,从而控制MPU地址
//#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可读取版本号,寄存器手册未提到
//#define MPU_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手册未提到
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器
#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器
#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器
//如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位).
//如果接V3.3,则IIC地址为0X69(不包含最低位).
#define MPU_ADDR 0X68
//因为模块AD0默认接GND,所以转为读写地址后,为0XD1和0XD0(如果接VCC,则为0XD3和0XD2)
//#define MPU_READ 0XD1
//#define MPU_WRITE 0XD0
u8 MPU_Init(void); //初始化MPU6050
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf);//IIC连续写
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf); //IIC连续读
u8 MPU_Write_Byte(u8 reg,u8 data); //IIC写一个字节
u8 MPU_Read_Byte(u8 reg); //IIC读一个字节
u8 MPU_Set_Gyro_Fsr(u8 fsr);
u8 MPU_Set_Accel_Fsr(u8 fsr);
u8 MPU_Set_LPF(u16 lpf);
u8 MPU_Set_Rate(u16 rate);
u8 MPU_Set_Fifo(u8 sens);
short MPU_Get_Temperature(void);
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz);
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
MPU6050.c
主要是单片机通过IIC协议向MPU6050写数据读数据的函数以及MPU6050初始化函数
#include "mpu6050.h"
#include "sys.h"
#include "delay.h"
#include "usart.h"
/**********************************************
函数名称:MPU_Init
函数功能:初始化MPU6050
函数参数:无
函数返回值:0,初始化成功 其他,初始化失败
**********************************************/
u8 MPU_Init(void)
{
u8 res;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能AFIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //先使能外设IO PORTA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOA
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);//禁止JTAG,从而PA15可以做普通IO使用,否则PA15不能做普通IO!!!
MPU_AD0_CTRL=0; //控制MPU6050的AD0脚为低电平,从机地址为:0X68
MPU_IIC_Init(); //初始化IIC总线
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050
delay_ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050
MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
MPU_Set_Accel_Fsr(0); //加速度传感器,±2g
MPU_Set_Rate(50); //设置采样率50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效
res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(res==MPU_ADDR) //器件ID正确,即res = MPU_ADDR = 0x68
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作
MPU_Set_Rate(50); //设置采样率为50Hz
}else return 1; //地址设置错误,返回1
return 0; //地址设置正确,返回0
}
/**********************************************
函数名称:MPU_Set_Gyro_Fsr
函数功能:设置MPU6050陀螺仪传感器满量程范围
函数参数:fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
函数返回值:0,设置成功 其他,设置失败
**********************************************/
u8 MPU_Set_Gyro_Fsr(u8 fsr)
{
return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3); //设置陀螺仪满量程范围
}
/**********************************************
函数名称:MPU_Set_Accel_Fsr
函数功能:设置MPU6050加速度传感器满量程范围
函数参数:fsr:0,±2g;1,±4g;2,±8g;3,±16g
函数返回值:0,设置成功 其他,设置失败
**********************************************/
u8 MPU_Set_Accel_Fsr(u8 fsr)
{
return MPU_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3); //设置加速度传感器满量程范围
}
/**********************************************
函数名称:MPU_Set_LPF
函数功能:设置MPU6050的数字低通滤波器
函数参数:lpf:数字低通滤波频率(Hz)
函数返回值:0,设置成功 其他,设置失败
**********************************************/
u8 MPU_Set_LPF(u16 lpf)
{
u8 data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return MPU_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器
}
/**********************************************
函数名称:MPU_Set_Rate
函数功能:设置MPU6050的采样率(假定Fs=1KHz)
函数参数:rate:4~1000(Hz) 初始化中rate取50
函数返回值:0,设置成功 其他,设置失败
**********************************************/
u8 MPU_Set_Rate(u16 rate)
{
u8 data;
if(rate>1000)rate=1000;
if(rate<4)rate=4;
data=1000/rate-1;
data=MPU_Write_Byte(MPU_SAMPLE_RATE_REG,data); //设置数字低通滤波器
return MPU_Set_LPF(rate/2); //自动设置LPF为采样率的一半
}
/**********************************************
函数名称:MPU_Get_Temperature
函数功能:得到温度传感器值
函数参数:无
函数返回值:温度值(扩大了100倍)
**********************************************/
short MPU_Get_Temperature(void)
{
u8 buf[2];
short raw;
float temp;
MPU_Read_Len(MPU_ADDR,MPU_TEMP_OUTH_REG,2,buf);
raw=((u16)buf[0]<<8)|buf[1];
temp=36.53+((double)raw)/340;
return temp*100;
}
/**********************************************
函数名称:MPU_Get_Gyroscope
函数功能:得到陀螺仪值(原始值)
函数参数:gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
函数返回值:0,读取成功 其他,读取失败
**********************************************/
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
if(res==0)
{
*gx=((u16)buf[0]<<8)|buf[1];
*gy=((u16)buf[2]<<8)|buf[3];
*gz=((u16)buf[4]<<8)|buf[5];
}
return res;
}
/**********************************************
函数名称:MPU_Get_Accelerometer
函数功能:得到加速度值(原始值)
函数参数:ax,ay,az:加速度传感器x,y,z轴的原始读数(带符号)
函数返回值:0,读取成功 其他,读取失败
**********************************************/
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);
if(res==0)
{
*ax=((u16)buf[0]<<8)|buf[1];
*ay=((u16)buf[2]<<8)|buf[3];
*az=((u16)buf[4]<<8)|buf[5];
}
return res;
}
/**********************************************
函数名称:MPU_Write_Len
函数功能:IIC连续写(写器件地址、寄存器地址、数据)
函数参数:addr:器件地址 reg:寄存器地址
len:写入数据的长度 buf:数据区
函数返回值:0,写入成功 其他,写入失败
**********************************************/
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
u8 i;
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0); //发送器件地址+写命令(0为写,1为读)
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
for(i=0;i<len;i++)
{
MPU_IIC_Send_Byte(buf[i]); //发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_Stop();
return 0;
}
/**********************************************
函数名称:MPU_Read_Len
函数功能:IIC连续读(写入器件地址后,读寄存器地址、数据)
函数参数:addr:器件地址 reg:要读的寄存器地址
len:要读取的数据长度 buf:读取到的数据存储区
函数返回值:0,读取成功 其他,读取失败
**********************************************/
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0); //发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|1); //发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
while(len)
{
if(len==1) *buf=MPU_IIC_Read_Byte(0); //读数据,发送nACK
else *buf=MPU_IIC_Read_Byte(1); //读数据,发送ACK
len--;
buf++;
}
MPU_IIC_Stop(); //产生一个停止条件
return 0;
}
/**********************************************
函数名称:MPU_Write_Byte
函数功能:IIC写一个字节
函数参数:data:写入的数据 reg:要写的寄存器地址
函数返回值:0,写入成功 其他,写入失败
**********************************************/
u8 MPU_Write_Byte(u8 reg,u8 data)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(data); //发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Stop();
return 0;
}
/**********************************************
函数名称:MPU_Read_Byte
函数功能:IIC读一个字节
函数参数:reg:要读的寄存器地址
函数返回值:res:读取到的数据
**********************************************/
u8 MPU_Read_Byte(u8 reg)
{
u8 res;
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0); //发送器件地址+写命令
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|1); //发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
res=MPU_IIC_Read_Byte(0); //读取数据,发送nACK
MPU_IIC_Stop(); //产生一个停止条件
return res;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
mpuiic.h
MPU的IIC协议函数头文件,PB11为SDA,PB10为SCL。
#ifndef __MPUIIC_H
#define __MPUIIC_H
#include "sys.h"
//IO方向设置 ---PB11
#define MPU_SDA_IN() {GPIOB->CRH &= 0XFFFF0FFF;GPIOB->CRH |= 8<<12;} //上拉/下拉 输入模式
#define MPU_SDA_OUT() {GPIOB->CRH &= 0XFFFF0FFF;GPIOB->CRH |= 3<<12;} //推挽输出 输出模式
//IO操作函数
#define MPU_IIC_SCL PBout(10) //SCL
#define MPU_IIC_SDA PBout(11) //SDA
#define MPU_READ_SDA PBin(11) //输入SDA
//IIC所有操作函数
void MPU_IIC_Delay(void); //IIC延时2ms函数
void MPU_IIC_Init(void); //初始化IIC的IO口
void MPU_IIC_Start(void); //发送IIC开始信号
void MPU_IIC_Stop(void); //发送IIC停止信号
void MPU_IIC_Send_Byte(u8 txd); //IIC发送一个字节
u8 MPU_IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
u8 MPU_IIC_Wait_Ack(void); //IIC等待ACK信号
void MPU_IIC_Ack(void); //IIC发送ACK信号
void MPU_IIC_NAck(void); //IIC不发送ACK信号
void IMPU_IC_Write_One_Byte(u8 daddr,u8 addr,u8 data);
u8 MPU_IIC_Read_One_Byte(u8 daddr,u8 addr);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
mpuiic.c
MPU的IIC协议函数编写
#include "mpuiic.h"
#include "delay.h"
/**********************************************
函数名称:MPU_IIC_Delay
函数功能:MPU IIC延时函数,延时2ms
函数参数:无
函数返回值:无
**********************************************/
void MPU_IIC_Delay(void)
{
delay_us(2);
}
/**********************************************
函数名称:MPU_IIC_Init
函数功能:MPU IIC初始化
函数参数:无
函数返回值:无
**********************************************/
void MPU_IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //先使能外设IO PORTB时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIO
GPIO_SetBits(GPIOB,GPIO_Pin_10|GPIO_Pin_11); //PB10,PB11 输出高
}
/**********************************************
函数名称:MPU_IIC_Start
函数功能:MPU IIC发送起始信号
函数参数:无
函数返回值:无
**********************************************/
void MPU_IIC_Start(void)
{
MPU_SDA_OUT(); //SDA线 输出
MPU_IIC_SDA=1;
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SDA=0; //START:当SCL线处于高电平时,SDA线突然从高变低,发送起始信号
MPU_IIC_Delay();
MPU_IIC_SCL=0; //钳住I2C总线,准备发送或接收数据
}
/**********************************************
函数名称:MPU_IIC_Stop
函数功能:MPU IIC发送停止信号
函数参数:无
函数返回值:无
**********************************************/
void MPU_IIC_Stop(void)
{
MPU_SDA_OUT(); //SDA线输出
MPU_IIC_SCL=0;
MPU_IIC_SDA=0; //STOP:当SCL线处于高电平时,SDA线突然从低变高,发送停止信号
MPU_IIC_Delay();
MPU_IIC_SCL=1;
MPU_IIC_SDA=1; //发送I2C总线结束信号
MPU_IIC_Delay();
}
/**********************************************
函数名称:MPU_IIC_Wait_Ack
函数功能:MPU IIC等待信号到来
函数参数:无
函数返回值:1:接收应答信号成功 0:接收应答信号失败
**********************************************/
u8 MPU_IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
MPU_SDA_IN(); //SDA设置为输入
MPU_IIC_SDA=1;MPU_IIC_Delay();
MPU_IIC_SCL=1;MPU_IIC_Delay();
while(MPU_READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_SCL=0;//时钟输出0
return 0;
}
/**********************************************
函数名称:MPU_IIC_Ack
函数功能:MPU IIC产生应答信号
函数参数:无
函数返回值:无
**********************************************/
void MPU_IIC_Ack(void)
{
MPU_IIC_SCL=0;
MPU_SDA_OUT();
MPU_IIC_SDA=0;
MPU_IIC_Delay();
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SCL=0;
}
/**********************************************
函数名称:MPU_IIC_NAck
函数功能:MPU IIC不产生应答信号
函数参数:无
函数返回值:无
**********************************************/
void MPU_IIC_NAck(void)
{
MPU_IIC_SCL=0;
MPU_SDA_OUT();
MPU_IIC_SDA=1;
MPU_IIC_Delay();
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SCL=0;
}
/**********************************************
函数名称:MPU_IIC_Send_Byte
函数功能:MPU IIC发送一个字节
函数参数:txd:要发送的数据
函数返回值:无
注意:IIC发送字节是一个一个位发送的,发送一个字节需要发送八次
**********************************************/
void MPU_IIC_Send_Byte(u8 txd)
{
u8 t;
MPU_SDA_OUT();
MPU_IIC_SCL=0; //拉低时钟开始数据传输
for(t=0;t<8;t++)
{
MPU_IIC_SDA=(txd&0x80)>>7;
txd<<=1;
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SCL=0;
MPU_IIC_Delay();
}
}
/**********************************************
函数名称:MPU_IIC_Read_Byte
函数功能:MPU IIC读取一个字节
函数参数:ack: 1,发送ACK 0,发送NACK
函数返回值:接收到的数据
注意:IIC读取字节是一个一个位读取的,读取一个字节需要读取八次
**********************************************/
u8 MPU_IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
MPU_SDA_IN(); //SDA设置为输入
for(i=0;i<8;i++)
{
MPU_IIC_SCL=0;
MPU_IIC_Delay();
MPU_IIC_SCL=1;
receive<<=1;
if(MPU_READ_SDA)receive++; //如果读到了数据
MPU_IIC_Delay();
}
if (!ack)
MPU_IIC_NAck(); //发送nACK
else
MPU_IIC_Ack(); //发送ACK
return receive;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
还有一些函数就不做过多赘述了,上面的代码备注已经做好了,认真吃肯定是会吃透的。多下点功夫肯定可以看懂。
6.学习补充
补充1:FIFO
FIFO( First Input First Output)简单说就是指先进先出。由于微电子技术的飞速发展,新一代FIFO芯片容量越来越大,体积越来越小,价格越来越便宜。作为一种新型大规模集成电路,FIFO芯片以其灵活、方便、高效的特性,逐渐在高速数据采集、高速数据处理、高速数据传输以及多机处理系统中得到越来越广泛的应用。在系统设计中,以增加数据传输率、处理大量数据流、匹配具有不同传输率的系统为目的而广泛使用FIFO存储器,从而提高了系统性能。FIFO存储器是一个先入先出的双口缓冲器,即第一个进入其内的数据第一个被移出,其中一个是存储器的输入口,另一个口是存储器的输出口。对于单片FIFO来说,主要有两种结构:触发导向结构和零导向传输结构。触发导向传输结构的FIFO是由寄存器阵列构成的,零导向传输结构的FIFO是由具有读和写地址指针的双口RAM构成。详见这篇博客:FIFO工作原理
补充2:关于PA15使用问题
在使用PA15作为普通IO口的时候,需要禁用JTAG才可以,代码如下:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能AFIO时钟
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);//禁止JTAG,从而PA15可以做普通IO使用,否则PA15不能做普通IO!!!
- 1
- 2
这是个大坑
补充3:关于MPU6050参考点
当代码烧入后,MPU的参考点是什么呢?参考点其实就是MPU6050初始化之后一开始的位置,没有一个强制的规定哪一个方向就是基准点,初始化之后的初始位置就是(0,0,0)点。
补充4:想到了再写吧
7.效果展示(可以先来看这个)
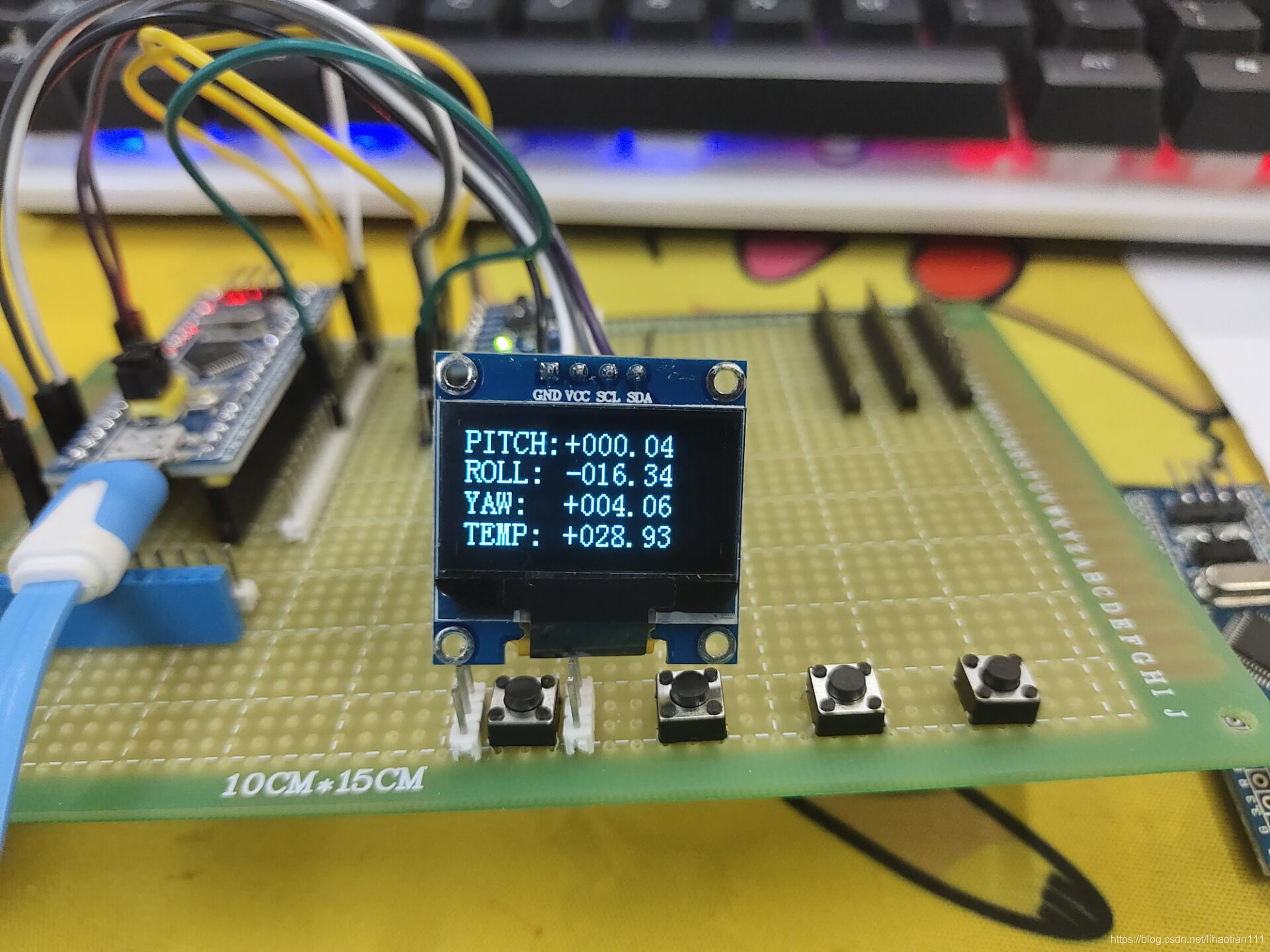
PITCH(俯仰角)、ROLL(翻滚角)、YAW(偏航角),单位均为 度。TEMP为当前温度,单位为摄氏度。
8.参考链接
[1]百度百科 陀螺仪
[2]正点原子资料下载中心
[3]百度百科 FIFO储存器
[4]姿态角Pitch、Roll、Yaw角介绍
9.完整版代码链接
往期博客:OpenMv与STM32通信讲解
最新博客:HC-SR04超声波测距模块
欢迎大家浏览支持!

