
- 1来这里,实现高薪就业梦想。_好梦成真高薪就业我来了表达
- 2RedisJson 横空出世,性能碾压 ES 和 MongoDB !
- 3Postman如何测试WebService接口_postman 测试webservice接口
- 4Python点云显示:open3d快速上手_python open3d
- 5Oracle 下载Windows、Linux_oracle18c下载
- 6HomeAssistant 首次使用配置连接无线网_ha network update
- 7常见的二十种软件测试方法全面讲解(史上最全)
- 8Android Studio自定义activity模板_android activitylayout 模板
- 9TCP调试工具使用说明_tcp调试助手_tcp网络调试工具
- 10带你了解RabbitMQ高级特性_rabbitmq message expiration
六轴机械臂时间能量冲击最优轨迹规划 轨迹优化 支持最高7次NURBS 默认7次 可修改成其他阶数 扩展性强_机械臂轨迹规划算法 源码
赞
踩
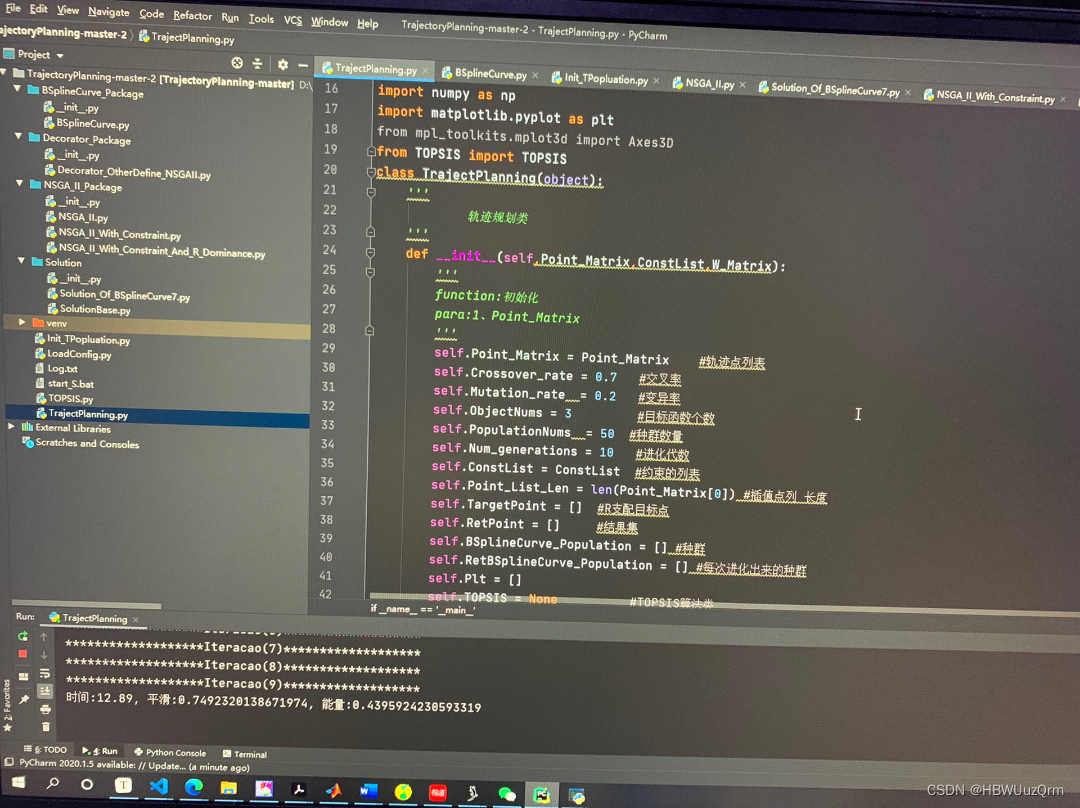
六轴机械臂时间能量冲击最优轨迹规划 轨迹优化 支持最高7次NURBS 默认7次 可修改成其他阶数 扩展性强 可出 关节位置 关节速度 关节加速度图 pareto最优解集图 可复现浙大机械手多目标轨迹规划lunwen 收敛速度快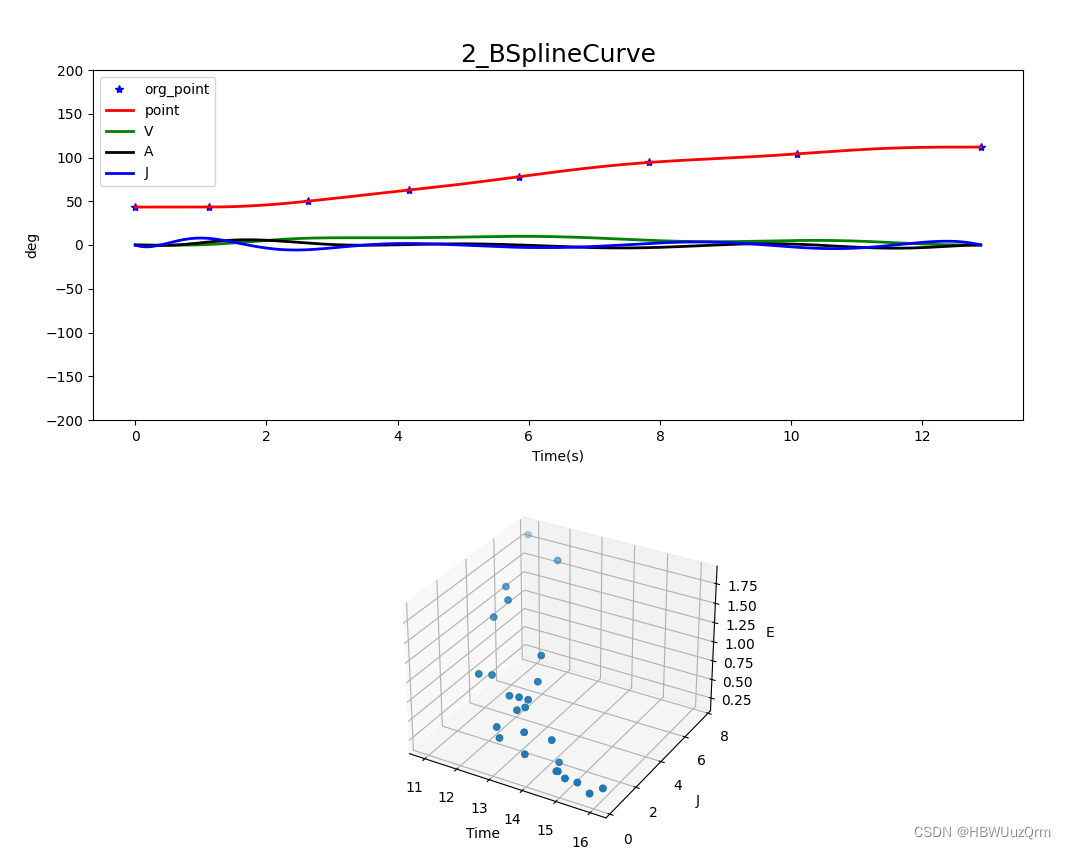
六轴机械臂时间能量冲击最优轨迹规划
在现代制造和生产领域中,自动化生产设备的应用越来越广泛。机械臂作为一种灵活多变的自动化设备,能够完成一些繁琐、危险、高难度的操作,例如零件装配、焊接、涂装等。在机械臂的运动控制中,轨迹规划是一项至关重要的技术。因为机械臂的运动轨迹直接关系到生产工艺、生产效率、质量稳定性等。而六轴机械臂时间能量冲击最优轨迹规划是目前轨迹规划技术的一个重要研究领域。
轨迹规划是指通过计算机,根据给定的运动任务、机械臂运动学模型和运动控制要求,生成一条机械臂的运动轨迹。六轴机械臂是一种基于六个自由度控制参数调节的机器人,它具有极高的自由度和灵活性。因此,六轴机械臂时间能量冲击最优轨迹规划涉及到多个复杂的因素,例如运动规划、优化算法、路径规划等,需要进行深入研究和探讨。
在六轴机械臂时间能量冲击最优轨迹规划中,轨迹优化是其中的一个重要环节。轨迹优化的目的是为了最大化机械臂的运动能量,同时减小机械臂的冲击力和振动,从而保证机械臂运动的快速、平稳、高效。本文提出了一种支持最高7次NURBS的默认7次轨迹优化算法,同时可修改成其他阶数,具有扩展性强的特点。在该算法中,我们将机械臂的关节位置、关节速度、关节加速度视为优化变量,通过多目标规划的方法,生成pareto最优解集图,可以非常方便地评估轨迹的优劣性,并且可以用于复现浙大机械手多目标轨迹规划的实验结果,使得该算法的收敛速度更加快速。
总之,六轴机械臂时间能量冲击最优轨迹规划是一项非常重要的技术,可以提高机械臂的运动效率和稳定性,进而提高生产效率和质量。本文提出的优化算法在轨迹优化中具有扩展性强、pareto最优解集图生成方便等优点,对于六轴机械臂轨迹规划研究具有一定的参考价值和实际应用前景。
相关代码,程序地址:http://lanzouw.top/666607272957.html

