
- 1ADB获取手机分辨率的多种方法,解决部分手机获取不到的问题_adb调手机分辨率
- 2GIt常用指令、概念及原理分析,图解rebase、merge指令区别,stash、reset贮藏重置等指令详解,每一条指令都有详细说明,值得收藏!_git rm stash
- 3Python自然语言处理笔记(五)------获取文本语料库_什么函数用于获取语料库中的文件
- 4ESP8266 01sWiFi模块保姆级教程 烧录和联网,连接华为云_esp8266wifi模块如何连接网络
- 5PostgreSQL11 | 数据类型和运算符_pgsql boolean相关函数
- 6开篇,对想学Java的小伙伴说点掏心窝子的大实话_程序员青戈怎么样
- 7[开题报告]Springboot会议室预约管理系统0bcs4计算机毕业设计
- 82024年运维最全升级Linux下的sudo_sudo v1(1),2024年最新原理+实战+视频+源码_sudo最新补丁包下载
- 9hive建表_hive创建外部表并指定存储位置
- 10LangChain快速加proxy代理_langchain openai proxy
基于stm32微控制器的绘图机器人设计
赞
踩
目录
第一章 绪论 1
-
基于 stm32 微控制器的绘图机器人研究设计的目的 1
-
基于 stm32 微控制器的绘图机器人研究设计的设计功能 1
第二章 系统整体方案设计 2
第三章 硬件设计 4 -
硬件电路资源使用设计 4
1.1 STM32F103RBT6 片上资源 4
1.2 外围芯片资源 4 -
机械结构设计 5
-
通信原理 9
第四章 软件设计 11 -
上位机程序设计 11
1.1 二值化算法 11
1.2 轮廓化算法 13
1.3 描边算法 14
1.4 串口通信数据格式 16 -
下位机程序设计 17
2.1 缓冲区算法 17
2.2 Bresenham 直线算法 17
2.3 坐标轴的确定 19
第五章 系统调试与实验结果 21 -
系统调试 21
-
实验结果 24
参 考 文 献 25
致 谢 26
附 录 27 -
通信原理
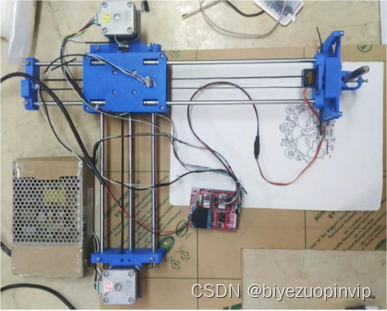
图 3-6 组装实物图
下位机采用 STM32 作为控制器。STM32 使用 CH340G 与计算机端串口连接,不仅提 供到 PC 的串行连接,还提供主控供电。STM32 通过 2 个计时器输出 3 路 PWM 方波,通 过 3 个 GPIO 引脚输出数字电平或数字式脉冲信号。开发环境为 MDK。
把足够功率和频率的脉冲波按照一定的顺序传到步进电机,才能驱动步进电机转动。
步进电机驱动模块接收控制 PWM 信号、方向(DIR)电平和使能(EN)信号,并按照步 进电机分配方式所要求的状态顺序来产生各相控信号,步进电机驱动模块输出信号数与电 机相数相同。DRV8825 每接收一个 PWM 脉冲信号,DRV8825 就输出一个由 DIR、EN、 STEP 综合决定的步进电机驱动信号。信号的产生特点在 MDK 中编写,使 STM32 产生控 制脉冲信号和方向电平。步进电机驱动模块采用 DRV8825。DRV8825 是一款带过流保护和 转换器的 DMOS 微步驱动器,在“STEP”中输入一个脉冲,即可驱动电动机产生微步。 只要控制 STEP 和 DIR 就可以了,STEP 是控制脉冲输入端,DIR 是方向电平输入端;3 个 模式选择端 MS1、MS2、MS3 全部接地即使用 32 细分,如果要求更高的精度,可通过选 其他模式,如选择 1/32 步迸模式,电机转一圈就要送 6400 个微步才能完成。控制脉冲发 生器和驱动器的结构示意图如图 2-7 所示。
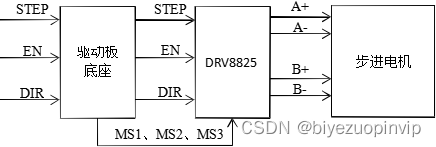
图 3-7 控制脉冲发生器和驱动器的结构
第四章 软件设计
绘图机器人运行中步进电机使用脉冲控制,STM32 发出与 42 步进电机前进距离的对 应控制信号和 PWM 信号。两点确定一条线段,由于串口速度较慢所以采用 div 参数增加细 分的方式减少串口数据传输量。给出两点 STM32 就会通过 Bresenham 直线算法,计算出其 间的各个点,再通过前后两点的位置关系完成绘图任务。
- 上位机程序设计
上位机程序采用 C#编写,计算机上位机将图片二值化再轮廓化,将轮廓化子图的细分 后的点的信息发送给下位机器,下位机将数据存储进缓冲区,再将缓冲区的数据绘制成图, 不断执行.直到最后一个子图执行完毕。本文转载自http://www.biyezuopin.vip/onews.asp?id=12566图片可以是 jpg、 bmp、png 格式等。用绘图软件 打开“限制图幅.bmp”将欲打印的字或者图编辑入图片中,保存。

图 4-1 蓝星上位机界面
#include "bsp.h" void SW_GPIO_Config(void) //限位开关GPIO初始化 校准用限位 { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(TOPSWITCHCLK|RCC_APB2Periph_AFIO,ENABLE ); GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU ; GPIO_InitStructure.GPIO_Pin=TOPSWITCHPIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ; GPIO_Init(TOPSWITCHPORT,&GPIO_InitStructure); RCC_APB2PeriphClockCmd(LEFTSWITCHCLK|RCC_APB2Periph_AFIO,ENABLE ); GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU ; GPIO_InitStructure.GPIO_Pin=LEFTSWITCHPIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ; GPIO_Init(LEFTSWITCHPORT,&GPIO_InitStructure); { // GPIO_EXTILineConfig(TOP_SWITCH_PORT_SOURCE, TOP_SWITCH_PIN_SOURCE); // GPIO_EXTILineConfig(LEFT_SWITCH_PORT_SOURCE, LEFT_SWITCH_PIN_SOURCE); // // EXTI_InitTypeDef EXTI_InitStructure; // EXTI_InitStructure.EXTI_Line = LEFT_SWITCH_INT_EXTI_LINE; // EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; // EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; // EXTI_InitStructure.EXTI_LineCmd = ENABLE; // EXTI_Init(&EXTI_InitStructure); // // EXTI_InitStructure.EXTI_Line = TOP_SWITCH_INT_EXTI_LINE; // EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; // EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; // EXTI_InitStructure.EXTI_LineCmd = ENABLE; // EXTI_Init(&EXTI_InitStructure); // // NVIC_InitTypeDef NVIC_InitStructure; // NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); // // NVIC_InitStructure.NVIC_IRQChannel = TOP_SWITCH_INT_EXTI_IRQ; //TOPSW外部中断线 // NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // NVIC_Init(&NVIC_InitStructure); // // NVIC_InitStructure.NVIC_IRQChannel = LEFT_SWITCH_INT_EXTI_IRQ; //LEFTSW外部中断线 // NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // NVIC_Init(&NVIC_InitStructure); } } void MOT_GPIO_Config(void)//MOT pwm、GPIO初始化函数 { //Tim2 --- ch1 A0 GPIO_InitTypeDef TOP_TIMGPIO_InitStructure; RCC_APB2PeriphClockCmd (AFIOCLK ,ENABLE ); RCC_APB1PeriphClockCmd (TOP_MotSCLK,ENABLE ); TOP_TIMGPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP ; TOP_TIMGPIO_InitStructure .GPIO_Pin =TOP_MotSPIN; TOP_TIMGPIO_InitStructure .GPIO_Speed = GPIO_Speed_50MHz ; GPIO_Init(TOP_MotSPORT,&TOP_TIMGPIO_InitStructure); //TOP D--B6 GPIO_InitTypeDef TOP_DGPIO_InitStructure; RCC_APB2PeriphClockCmd (TOP_MotDCLK ,ENABLE ); TOP_DGPIO_InitStructure .GPIO_Mode =GPIO_Mode_Out_PP ; TOP_DGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; TOP_DGPIO_InitStructure .GPIO_Pin =TOP_MotDPIN; GPIO_Init(TOP_MotDPORT,&TOP_DGPIO_InitStructure); //Tim2 --- ch2 A1 GPIO_InitTypeDef BOT_TIMGPIO_InitStructure; RCC_APB2PeriphClockCmd (AFIOCLK ,ENABLE ); RCC_APB1PeriphClockCmd (BOT_MotSCLK,ENABLE ); BOT_TIMGPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP ; BOT_TIMGPIO_InitStructure .GPIO_Pin =BOT_MotSPIN; BOT_TIMGPIO_InitStructure .GPIO_Speed = GPIO_Speed_50MHz ; GPIO_Init(BOT_MotSPORT,&BOT_TIMGPIO_InitStructure); //BOT D--A8 GPIO_InitTypeDef BOT_DGPIO_InitStructure; RCC_APB2PeriphClockCmd (BOT_MotDCLK ,ENABLE ); BOT_DGPIO_InitStructure .GPIO_Mode =GPIO_Mode_Out_PP ; BOT_DGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; BOT_DGPIO_InitStructure .GPIO_Pin =BOT_MotDPIN; GPIO_Init(BOT_MotDPORT,&BOT_DGPIO_InitStructure); GPIO_InitTypeDef EGPIO_InitStructure; RCC_APB2PeriphClockCmd (MotECLK ,ENABLE ); EGPIO_InitStructure .GPIO_Mode =GPIO_Mode_Out_PP ; EGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; EGPIO_InitStructure .GPIO_Pin =MotEPIN; GPIO_Init(MotEPORT,&EGPIO_InitStructure); MOT_DISEN; GPIO_InitTypeDef DJ_GPIO_InitStructure; RCC_APB2PeriphClockCmd (AFIOCLK ,ENABLE ); RCC_APB1PeriphClockCmd (DJ_MotCLK,ENABLE ); DJ_GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP ; DJ_GPIO_InitStructure .GPIO_Pin =DJ_MotPIN; DJ_GPIO_InitStructure .GPIO_Speed = GPIO_Speed_50MHz ; GPIO_Init(DJ_MotPORT,&DJ_GPIO_InitStructure); } void PWM_Config(u32 PWM1Freq)//Tim2 -PWM { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; u16 tim_period; u16 tim_pulse; tim_period=(u16)(TIM2_COUNTER_CLK/PWM1Freq-1); tim_pulse =(tim_period+1)*0.5;//默认占空比为50% TIM_TimeBaseStructure.TIM_Prescaler =0;//预分频为1 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up ;//向上计数 TIM_TimeBaseStructure.TIM_Period = tim_period; //定时周期 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseInit(TIM2 ,&TIM_TimeBaseStructure); TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse =tim_pulse; TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; TIM_OC1Init(TIM2 ,&TIM_OCInitStructure); TIM_OC2Init(TIM2 ,&TIM_OCInitStructure); // TIM2->CCER&=~1 ;//通道1关闭 // TIM2->CCER&=~(1<<4) ;//通道2关闭 TIM_OC1PolarityConfig (TIM2,TIM_OCPreload_Enable ); TIM_OC2PolarityConfig (TIM2,TIM_OCPreload_Enable ); TIM_ARRPreloadConfig (TIM2,ENABLE ); TIM_Cmd (TIM2,ENABLE ); TIM2->DIER |=(u32)1;//tim2中断使能 // TIM2->CR2 &=~(u32)7<<4; } void DJ_PWM_Config(u32 PWM1Freq)//Tim4 -ch4 { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; u16 tim_period; u16 tim_pulse; tim_period=(u16)(TIM4_COUNTER_CLK/PWM1Freq-1); tim_pulse =(tim_period+1)*0.08;//默认占空比为8 x0.08 TIM_TimeBaseStructure.TIM_Prescaler =1000;//预分频为1 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up ;//向上计数 TIM_TimeBaseStructure.TIM_Period = tim_period; //定时周期 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseInit(TIM4,&TIM_TimeBaseStructure); TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse =tim_pulse; TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; TIM_OC4Init(TIM4 ,&TIM_OCInitStructure); TIM_OC1PolarityConfig (TIM4,TIM_OCPreload_Enable ); //TIM_OC4PolarityConfig (TIM4,TIM_OCPreload_Enable ); TIM_ARRPreloadConfig (TIM4,ENABLE ); TIM_Cmd (TIM4,ENABLE ); TIM4->CCER|=(1<<12) ;//通道4打开 //TIM2->DIER |=(u32)1;//tim2中断使能 // TIM2->CR2 &=~(u32)7<<4; } void DJ_PWM_Change(u8 t,u32 PWM1Freq) { u16 tim_period; u16 tim_pulse; tim_period=(u16)(TIM4_COUNTER_CLK/PWM1Freq-1); tim_pulse =(tim_period+1)*t/1000;//默认占空比为8 x0.08 DJ_TIM ->CCR4 = tim_pulse; } void TIM_NVIC_Config(void)//TIM2中断初始化 { NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn ; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); } void USART_NVIC_Config(void) { NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); } void USART_Config(void) { GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE); DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE); GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空模式 GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure); // 配置串口的工作参数 USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE; // 配置波特率 USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 配置 针数据字长 USART_InitStructure.USART_StopBits = USART_StopBits_1; // 配置停止位 USART_InitStructure.USART_Parity = USART_Parity_No ; // 配置校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 配置硬件流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 配置工作模式,收发一起 USART_Init(DEBUG_USARTx, &USART_InitStructure); // 完成串口的初始化配置 USART_NVIC_Config(); // 串口中断优先级配置 USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE); // 使能串口接收中断 USART_Cmd(DEBUG_USARTx, ENABLE); // 使能串口 } void Usart_SendByte( USART_TypeDef * pUSARTx, u8 ch)//发送一个字节 { USART_SendData(pUSARTx,ch); // 发送一个字节数据到USART while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET); // 等待发送数据寄存器为空 } void Usart_SendArray( USART_TypeDef * pUSARTx, u8 *array, u16 num) //发送8位数组 { uint8_t i; for(i=0; i<num; i++) { Usart_SendByte(pUSARTx,array[i]); //发送一个字节数据到USART } while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET); //等待发送完成 } /***************** 发送字符串 **********************/ void Usart_SendString( USART_TypeDef * pUSARTx, u8 *str) { unsigned int k=0; do { Usart_SendByte( pUSARTx, *(str + k) ); k++; } while(*(str + k)!='\0'); while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET); /* 等待发送完成 */ } /***************** 发送一个16位数 **********************/ void Usart_SendHalfWord( USART_TypeDef * pUSARTx, u16 ch) { uint8_t temp_h, temp_l; /* 取出高八位 */ temp_h = (ch&0XFF00)>>8; /* 取出低八位 */ temp_l = ch&0XFF; /* 发送高八位 */ USART_SendData(pUSARTx,temp_h); while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET); /* 发送低八位 */ USART_SendData(pUSARTx,temp_l); while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290




















