
- 1rosweb开源项目运行
- 2didFinishLaunchingWithOptions
- 3code been used replace使用错误_laravel code been used, rid: 62eb5b73-032d2bd8-46c
- 4Linux基础——MySQL(二)命令_ps -ef|grep mysql
- 5浅谈大数据之足球盘口赔率水位分析的思路与神准预测技巧(一)_胜平负预测最准的方法
- 6Unity图集处理小工具:批量设置图集的MaxSize及压缩格式_unity 动态调整图集尺寸
- 7linux mysql 切换数据库命令_Linux环境下MySQL基础命令----进入退出数据库,设置修改root密码...
- 8python+pywinauto请问我这个是环境没配置好吗,哪里出问题了呀_pywinauto.timings.timeouterror
- 9这是在下写的一些小小的项目经验和项目需求_一般项目经验写几个项目
- 10VSCode 配置 Lua 开发环境(清晰明了)_lua vscode
python求雅可比矩阵_雅可比算法求矩阵的特征值和特征向量
赞
踩
目的
求一个实对称矩阵的所有特征值和特征向量。
前置知识
对于一个实对称矩阵
定义
\begin{bmatrix}
1 & & & & & \cdots& & & & & 0\
&\ddots & & & & & & & & &\
& &1 & & & & & & & &\
& & &\cos\theta & & & &-\sin\theta & & &\
& & & &1 & &0 & & & &\
& & & & &\ddots & & & & &\
& & & &0 & &1 & & & &\
& & &\sin\theta & & & &\cos\theta & & &\
& & & & & & & &1 & &\
& & & & & & & & &\ddots &\
0& & & & & & & &0 & &1
\end{bmatrix}
\[即在单位矩阵的基础上,修改$a_{pp}=a_{qq}=\cos\theta,a_{qp}=-a_{pq}=\sin\theta$
对于$n$阶向量$\alpha$,$\alpha\cdot G(p,q,\theta)$的几何意义是把$\alpha$在与第$p$维坐标轴和第$q$维坐标轴平行的平面内旋转角度$\theta$,并且旋转后的模长保持不变。
## 算法原理
大概思路使通过旋转变换使非对角线上的元素不断变小,最后得到与原矩阵相似的对角矩阵。
每次找到矩阵$A$绝对值最大的的非对角线元素,设为$a_{pq}$,令$U=G(p,q,\theta)$,将$A$变换为$U^TAU$
变换后的值为
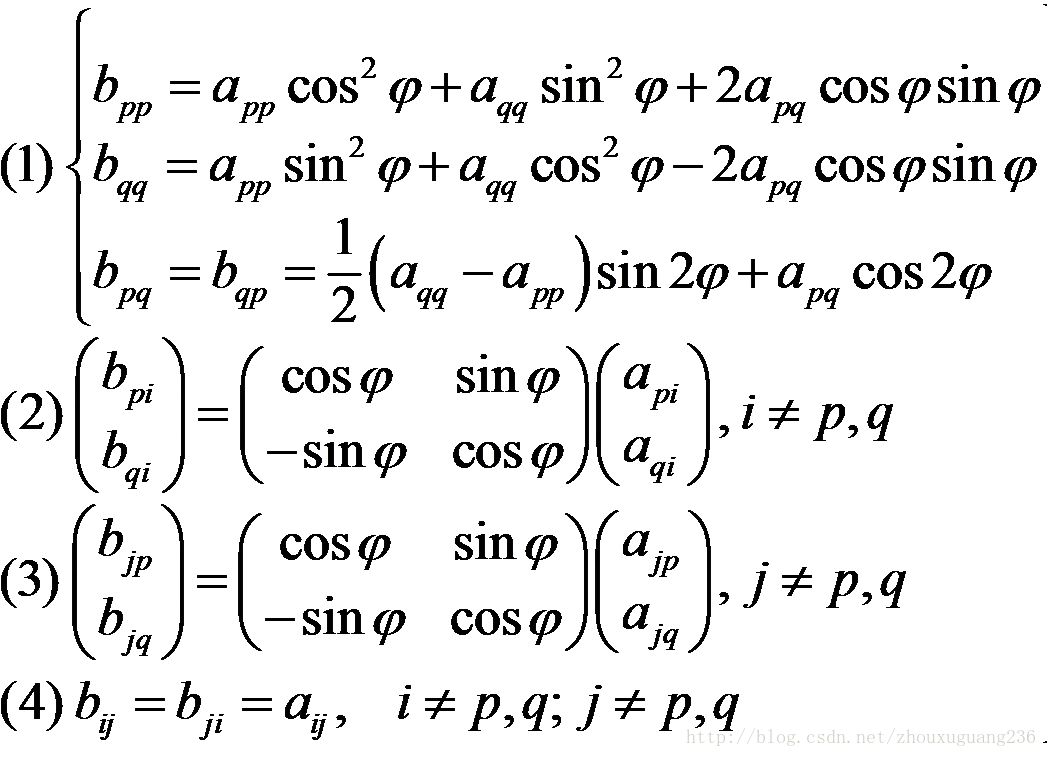
通过令$b_{p,q}=0$解得
注意到旋转操作并不会改变每个行向量或列向量的模长,即矩阵$A$的F-范数$||A||_F=\sqrt{\sum_i\sum_ja_{ij}^2}$是不变的,并且通过计算可以得出
## 算法流程
(1)令矩阵$T=E$,即初始化单位矩阵
(2)找到$A$中绝对值最大的非对角选元素$a_{pq}$
(3)找到对应的角度$\theta$,构造矩阵$U=G(p,q,\theta)$
(4)令$A=U^TAU,T=TU$
(5)不停地重复(2)到(4),直到$a_{pq}
## 代码
```c
#include
using namespace std;
const int N=1005;
const double eps=1e-5;
const int lim=100;
int n,id[N];
double key[N],mat[N][N],EigVal[N],EigVec[N][N],tmpEigVec[N][N];
bool cmpEigVal(int x,int y)
{
return key[x]>key[y];
}
void Find_Eigen(int n,double (*a)[N],double *EigVal,double (*EigVec)[N])
{
for (int i=1;i<=n;i++)
for (int j=1;j<=n;j++)
EigVec[i][j]=0;
for (int i=1;i<=n;i++) EigVec[i][i]=1.0;
int count=0;
while (1)
{
//统计迭代次数
count++;
//找绝对值最大的元素
double mx_val=0;
int row_id,col_id;
for (int i=1;i
for (int j=i+1;j<=n;j++)
if (fabs(a[i][j])>mx_val) mx_val=fabs(a[i][j]),row_id=i,col_id=j;
if (mx_vallim) break;
//进行旋转变换
int p=row_id,q=col_id;
double Apq=a[p][q],App=a[p][p],Aqq=a[q][q];
double theta=0.5*atan2(-2.0*Apq,Aqq-App);
double sint=sin(theta),cost=cos(theta);
double sin2t=sin(2.0*theta),cos2t=cos(2.0*theta);
a[p][p]=App*cost*cost+Aqq*sint*sint+2.0*Apq*cost*sint;
a[q][q]=App*sint*sint+Aqq*cost*cost-2.0*Apq*cost*sint;
a[p][q]=a[q][p]=0.5*(Aqq-App)*sin2t+Apq*cos2t;
for (int i=1;i<=n;i++)
if (i!=p&&i!=q)
{
double u=a[p][i],v=a[q][i];
a[p][i]=u*cost+v*sint;a[q][i]=v*cost-u*sint;
u=a[i][p],v=a[i][q];
a[i][p]=u*cost+v*sint;a[i][q]=v*cost-u*sint;
}
//计算特征向量
for (int i=1;i<=n;i++)
{
double u=EigVec[i][p],v=EigVec[i][q];
EigVec[i][p]=u*cost+v*sint;EigVec[i][q]=v*cost-u*sint;
}
}
//对特征值排序
for (int i=1;i<=n;i++) id[i]=i,key[i]=a[i][i];
std::sort(id+1,id+n+1,cmpEigVal);
for (int i=1;i<=n;i++)
{
EigVal[i]=a[id[i]][id[i]];
for (int j=1;j<=n;j++)
tmpEigVec[j][i]=EigVec[j][id[i]];
}
for (int i=1;i<=n;i++)
for (int j=1;j<=n;j++)
EigVec[i][j]=tmpEigVec[i][j];
//特征向量为列向量
}
int main()
{
scanf("%d",&n);
for (int i=1;i<=n;i++)
for (int j=1;j<=n;j++)
scanf("%lf",&mat[i][j]);
Find_Eigen(n,mat,EigVal,EigVec);
printf("EigenValues = ");
for (int i=1;i<=n;i++) printf("%lf ",EigVal[i]);
printf("\nEigenVector =\n");
for (int i=1;i<=n;i++)
for (int j=1;j<=n;j++)
printf("%lf%c",EigVec[i][j],j==n?'\n':' ');
return 0;
}
```\]

