
热门标签
热门文章
- 1人脸识别之线性回归_线性回归人脸识别
- 2虚拟环境命令行安装torch+cuda_cuda torch安装指令
- 3人工智能与机器人的融合:人机协作的新时代
- 4首批入选,金融信创解决方案评选结果公布_信创名单在哪里公布
- 5对一大厂游戏测试员的访谈实录,带你了解游戏测试_关于游戏方面的采访问题
- 6万字梳理:算法0基础入门-主流排序算法大集合;硬核整理图解+代码--数据结构与算法小结4_阿伟算法笔记,万字整理
- 72023年了学Java还能找到工作么?_2023 java就业行情分析
- 8LLMs之Guanaco:《QLoRA:Efficient Finetuning of Quantized LLMs》翻译与解读_qlora: efficient finetuning of quantized llms
- 9用Tensorflow实现CNN文本分类(详细解释及TextCNN代码解释)_tensorflow cnn labelencoder
- 10随笔:信息系统项目管理师(软考高级2023)考试指南_软考信息系统项目管理和系统规划和管理
当前位置: article > 正文
rikibot机器人调参
作者:菜鸟追梦旅行 | 2024-03-26 20:59:24
赞
踩
rikibot机器人调参
1.使用Win32Disk image烧录镜像
2.将适配的雷达(rplidar)文件移入小车系统

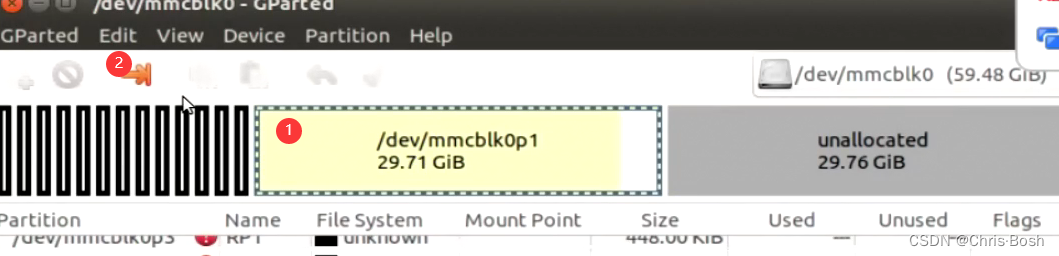
3.扩容操作,扩容后重启


4.修改操作


catkin_make后重新打开一个终端
进入该路径
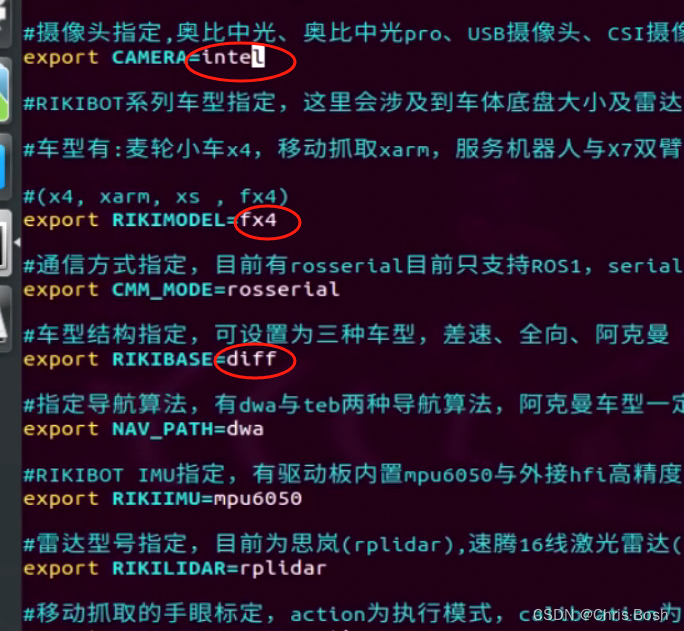
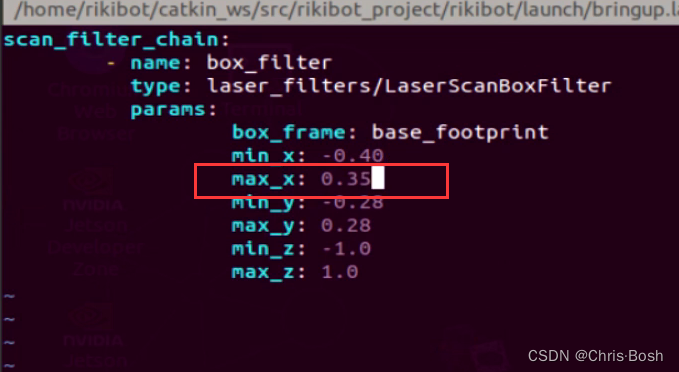
打开配置文件


先看下面两步,按照另一个配置文件改!
这个是模板,按照这个改上面的!


具体修改如下:


然后修改.bashrc文件(在主目录下打开)

然后返回刚才catkin_make的终端
输入此命令!




最后刷新变量

完事!
声明:本文内容由网友自发贡献,转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

