
热门标签
热门文章
- 1头歌--Java入门 - 数组进阶_头歌java数组进阶答案
- 2字节跳动测开面经,听他讲完,紧张得汗流了一背!_字节财经 测开
- 3数组和链表的优缺点_链表储存的优点
- 4关于Django数据库模型的字段类型DateField的学习记录_django datefiled
- 5Mac下vscode配置c/c++开发环境_mac的"intellisensemode":
- 6189. 轮转数组_for (int i = start, j = end; i < j; i++, j--) { in
- 7【Leetcode动态规划--股票问题】121,122,123.买卖股票的最佳时机 I I III 188.买卖股票的最佳时机IV 309.最佳买卖股票时机含冷冻期 714.买卖股票的最佳时机含手续费_股票交易有k次交易机会代码
- 8【ROS2机器人入门到实战】第九章 机器人仿真_ros2的dolly test
- 9vue前端使用json-viewer进行json展示_前端如何显示json图片
- 10Linux操作系统管理_linux系统管理
当前位置: article > 正文
【蓝桥杯单片机】9个基础模块应用总结_常用的单片机模块
作者:菜鸟追梦旅行 | 2024-05-12 22:19:51
赞
踩
常用的单片机模块
蓝桥杯单片机
(〇)注意事项
- 运行程序时注意调整J13为IO模式 / MM模式
- 运行程序时注意调整J5为BTN独立按键 / KBD矩阵键盘
- Keil创建工程文件选择AT89C52
- Keil编译完后要勾选Creat HEX File
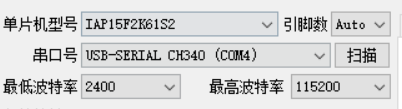
- STC-ISP要选择相应的单片机型号和串口号
- 串口助手中注意波特率调整 与文本、HEX模式的切换
- 注意区别unsigned char 与 unsigned int 类型
- DS18B20中onewire.c中调用的所有延时函数的参数都要扩大10倍
(一)LED闪烁
01 LED全部同时闪烁
#include <reg52.h> //74HC138译码器定义管脚 sbit HC138_A = P2^5; sbit HC138_B = P2^6; sbit HC138_C = P2^7; void Delay(unsigned int t) //延时函数 { while(t--); while(t--); } void LEDRunning() //LED闪烁函数 { HC138_C = 1; //CBA=100即38译码器Y4输出低电平(有效) HC138_B = 0; HC138_A = 0; P0 = 0x00; //全亮,根据原理图:低电平有效 Delay(60000); Delay(60000); P0 = 0xff; //全灭 Delay(60000); Delay(60000); } void main() //主函数 { while(1) { LEDRunning(); } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
02 LED闪烁三次后依次亮灭
#include <reg52.h> //74HC138译码器定义管脚 sbit HC138_A = P2^5; sbit HC138_B = P2^6; sbit HC138_C = P2^7; //延时函数 void Delay(unsigned int t) { while(t--); while(t--); } void LEDRunning() { unsigned char i; HC138_C = 1; HC138_B = 0; HC138_A = 0; for(i=0;i<3;i++) { P0 = 0x00; Delay(60000); Delay(60000); P0 = 0xff; Delay(60000); Delay(60000); } for(i=1;i<=8;i++) //i从1开始,使第一次也亮 { P0 = 0xff << i; //全1,左移补0 Delay(60000); Delay(60000); } for(i=1;i<=8;i++) { P0 = ~(0xff << i); //相当于全0,左移补1 Delay(60000); Delay(60000); } } void main() { while(1) { LEDRunning(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
*03 补充关闭外设的代码
void InitSystem() //关闭外设(蜂鸣器与继电器)
{
HC138_C = 1; //Y5输出,连接U9锁存器与达林顿管
HC138_B = 0;
HC138_A = 1;
P0 = 0x00; //达林顿管中为非门,输出1关闭蜂鸣器与继电器
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
04 LED闪烁并控制蜂鸣器与继电器
#include <reg52.h> //74HC138译码器定义管脚 sbit HC138_A = P2^5; sbit HC138_B = P2^6; sbit HC138_C = P2^7; //延时函数 void Delay(unsigned int t) { while(t--); while(t--); } void LEDRunning() { unsigned char i; HC138_C = 1; //Y4输出 HC138_B = 0; HC138_A = 0; for(i=0;i<3;i++) { P0 = 0x00; Delay(60000); Delay(60000); P0 = 0xff; Delay(60000); Delay(60000); } HC138_C = 1; //Y5输出 HC138_B = 0; HC138_A = 1; P0 = 0x10; //继电器吸合,其LED亮 Delay(60000); Delay(60000); P0 = 0x00; //继电器关闭,其LED灭 HC138_C = 1; //Y4输出,切换到控制8个LED HC138_B = 0; HC138_A = 0; for(i=1;i<=8;i++) //i从1开始,使第一次也亮 { P0 = 0xff << i; //全1,左移补0 Delay(60000); Delay(60000); } for(i=1;i<=8;i++) { P0 = ~(0xff << i); //相当于全0,左移补1 Delay(60000); Delay(60000); } HC138_C = 1; //Y5输出 HC138_B = 0; HC138_A = 1; P0 = 0x40; //蜂鸣器响,其LED亮 Delay(60000); Delay(60000); P0 = 0x00; //蜂鸣器关闭,其LED灭 } void InitSystem() //关闭外设(蜂鸣器与继电器) { HC138_C = 1; //Y5输出,连接U9锁存器与达林顿管 HC138_B = 0; HC138_A = 1; P0 = 0x00; //达林顿管中为非门,输出1关闭蜂鸣器与继电器 } void main() { InitSystem(); //关闭外设 while(1) { LEDRunning(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
04 简化整体程序设计
#include <reg52.h> void Delay(unsigned int t) { while(t--); while(t--); } void InitHC138(unsigned char n) //控制74HC138输出 { switch(n) { case 4: P2 = P2 & 0x1F | 0x80; break; case 5: P2 = P2 & 0x1F | 0xa0; break; case 6: P2 = P2 & 0x1F | 0xc0; break; case 7: P2 = P2 & 0x1F | 0xe0; break; } } void LEDRunning() //控制LED闪烁 { unsigned char i; InitHC138(4); for(i=0;i<3;i++) { P0 = 0x00; Delay(60000); Delay(60000); P0 = 0xff; Delay(60000); Delay(60000); } InitHC138(5); //控制继电器 P0 = 0x10; Delay(60000); Delay(60000); P0 = 0x00; InitHC138(4); for(i=1;i<=8;i++) { P0 = 0xff << i; Delay(60000); Delay(60000); } for(i=1;i<=8;i++) { P0 = ~(0xff << i); Delay(60000); Delay(60000); } InitHC138(5); //控制蜂鸣器 P0 = 0x40; Delay(60000); Delay(60000); P0 = 0x00; } void InitSystem() //关闭外设(蜂鸣器与继电器) { InitHC138(5); P0 = 0x00; } void main() { InitSystem(); //关闭外设 while(1) { LEDRunning(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
(二)数码管显示
01 数码管静态显示
(数码管分别单独显示0 ~ 9,然后同时显示0 ~ F)
#include <reg52.h> void Delay(unsigned int t) { while(t--); while(t--); } //建立数组:数码管段码表,即单个数码管上显示的内容 unsigned char SMG_duanma[18]= {0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90, // 0~9 0x88,0x80,0xc6,0xc0,0x86,0x8e, // A~F 0xbf,0x7f}; // -与. void InitHC138(unsigned char n) //选择输出端口连接相应功能的锁存器 { switch(n) { case 4: P2 = P2 & 0x1F | 0x80; break; case 5: P2 = P2 & 0x1F | 0xA0; break; case 6: P2 = P2 & 0x1F | 0xC0; break; case 7: P2 = P2 & 0x1F | 0xE0; break; } } void show_SMG(unsigned char dat, unsigned int pos) //单个数码管显示 { InitHC138(7); //单个数码管显示的内容 P0 = dat; InitHC138(6); //单个数码管显示的位置 P0 = 0x01 << pos; /*从左边第一个数码管开始,到右边最后一个数码管为止 由于高位在前,低位在后,代码编写时为左移符号*/ } void SMG_Static() //数码管分别单独显示0~9 { unsigned char i,j; for(i = 0;i < 8; i++) //控制显示位置 { for(j = 0;j < 10; j++) //控制显示内容 { show_SMG(SMG_duanma[j],i); Delay(60000); Delay(60000); } } for(j = 0;j < 16; j++) { InitHC138(7); //控制显示内容,段码端,接0有效 P0 = SMG_duanma[j]; InitHC138(6); //控制显示位置,共阳com端,接1有效 P0 = 0xff; Delay(60000); //容易忘记延时函数!!! Delay(60000); } } void InitSystem() //初始化,关闭蜂鸣器、继电器、LED { InitHC138(5); P0 = 0x00; InitHC138(4); P0 = 0xff; } void main() { InitSystem(); //关闭外设 while(1) { SMG_Static(); //数码管显示函数 } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
02 数码管动态显示
(前四位为2023,中二位为- -分隔符,后两位为月份递增)
#include <reg52.h> unsigned char month = 12; //月份上限 unsigned char SMG_duanma[18]={ 0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90, // 0~9 0x88,0x80,0xc6,0xc0,0x86,0x8e, // A~F 0xbf,0x7f}; // -与. void SelectHC573(unsigned char channel) //74HC138输出端连接的相应信道的HC573 { switch(channel) { case(4): P2 = P2 & 0x1f | 0x80; break; case(5): P2 = P2 & 0x1f | 0xa0; break; case(6): P2 = P2 & 0x1f | 0xc0; break; case(7): P2 = P2 & 0x1f | 0xe0; break; } } void SMG_bit(unsigned char dat, unsigned char pos) //单个数码管的显示内容、显示位置 { SelectHC573(7); P0 = dat; SelectHC573(6); P0 = 0x01 << pos; } void SMG_Dlelay(unsigned int t) //单个数码管显示的延时函数 { while(t--); } void SMG_display() { SMG_bit(SMG_duanma[2],0); SMG_Dlelay(500); SMG_bit(SMG_duanma[0],1); SMG_Dlelay(500); SMG_bit(SMG_duanma[2],2); SMG_Dlelay(500); SMG_bit(SMG_duanma[3],3); SMG_Dlelay(500); SMG_bit(SMG_duanma[16],4); SMG_Dlelay(500); SMG_bit(SMG_duanma[16],5); SMG_Dlelay(500); SMG_bit(SMG_duanma[month/10],6); SMG_Dlelay(500); SMG_bit(SMG_duanma[month%10],7); SMG_Dlelay(500); } void Delay(unsigned int t) //控制月份递增的延时函数 { while(t--) { SMG_display(); } } void InitSystem() //关闭外设 { SelectHC573(5); P0 = 0x00; } void main() { InitSystem(); while(1) { SMG_display(); month++; if(month>12) month = 1; Delay(100); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
(三)独立按键
01 独立按键的基本操作
S7 ~ S4 控制 L1 ~ L4亮灭
#include <reg52.h> sbit S7 = P3^0; //定义按键引脚 sbit S6 = P3^1; sbit S5 = P3^2; sbit S4 = P3^3; sbit L1 = P0^0; //定义LED引脚 sbit L2 = P0^1; sbit L3 = P0^2; sbit L4 = P0^3; sbit L5 = P0^4; sbit L6 = P0^5; sbit L7 = P0^6; sbit L8 = P0^7; void SelectHC573(unsigned char channel) //选择HC138输出的HC573锁存器 { switch(channel) { case 4: P2 = P2 & 0x1f | 0x80; break; case 5: P2 = P2 & 0x1f | 0xa0; break; case 6: P2 = P2 & 0x1f | 0xc0; break; case 7: P2 = P2 & 0x1f | 0xe0; break; } } void KEY_Delay(unsigned char t) //按键延时 { while(t--); } void KEY_Alone() { SelectHC573(4); //选通LED锁存器 if(S7 == 0) //判断按键是否按下 { KEY_Delay(100); //延时去抖动(消抖) /*实现按键消抖 一个简单的消抖办法是检测到按键按下,则等待一定时常之后,再次检测是否在按下状态,如果是按下的状态,那么才确定是在按下状态。*/ if(S7 ==0) //按键持续按下 { L1 = 0; //L1亮 while(S7 ==0); //如果按键为按下状态,则L1保持亮状态,不执行下面语句 L1 = 1; //如果按键松开,即跳出while循环,则L1灭 } } if(S6 == 0) { KEY_Delay(100); if(S6 ==0) { L2 = 0; while(S6 ==0); L2 = 1; } } if(S5 == 0) { KEY_Delay(100); if(S5 ==0) { L3 = 0; while(S5 ==0); L3 = 1; } } if(S4 == 0) { KEY_Delay(100); if(S4 ==0) { L4 = 0; while(S4 ==0); L4 = 1; } } } void InitSystem() //关闭外设,LED上电后为全灭状态 { SelectHC573(5); P0 = 0x00; SelectHC573(4); P0 = 0xFF; } void main() { InitSystem(); while(1) { KEY_Alone(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
02 独立按键的扩展应用
S7、S6为两个状态,相互独立,
S7按下时,S6不能操作;S6按下时,S7不能操作
S7、S6都能够控制S5、S4
当S7、S6都未按下时,S5、S4都不能操作
S7控制S5使L3亮灭;S7控制S4使L4亮灭
S6控制S5使L5亮灭;S6控制S4使L6亮灭
#include <reg52.h> sbit S7 = P3^0; //定义按键引脚 sbit S6 = P3^1; sbit S5 = P3^2; sbit S4 = P3^3; sbit L1 = P0^0; //定义LED引脚 sbit L2 = P0^1; sbit L3 = P0^2; sbit L4 = P0^3; sbit L5 = P0^4; sbit L6 = P0^5; sbit L7 = P0^6; sbit L8 = P0^7; void SelectHC573(unsigned char channel) //选择HC138输出的HC573锁存器 { switch(channel) { case 4: P2 = P2 & 0x1f | 0x80; break; case 5: P2 = P2 & 0x1f | 0xa0; break; case 6: P2 = P2 & 0x1f | 0xc0; break; case 7: P2 = P2 & 0x1f | 0xe0; break; } } void KEY_Delay(unsigned char t) //按键延时 { while(t--); } unsigned char stat = 0; //定义一个状态变量 void KEY_Alone() { SelectHC573(4); //选通LED锁存器 if(S7 == 0) //判断按键是否按下 { KEY_Delay(100); //延时去抖动 if(S7 ==0) //按键持续按下 { if(stat == 0) //按键按下后,判断当前状态 { L1 = 0; stat = 1; //占用状态,设置为状态1 } else if(stat == 1) //按键按下后,判断当前状态 { L1 = 1; stat = 0; //释放状态 } while(S7 ==0); //循环当前状态,避免跳变 } } if(S6 == 0) { KEY_Delay(100); if(S6 ==0) { if(stat == 0) { L2 = 0; stat = 2; //占用状态,设置为状态2 } else if(stat == 2) { L2 = 1; stat = 0; //释放状态 } while(S6 ==0); //循环当前状态,避免跳变 } } if(S5 == 0) { KEY_Delay(100); if(S5 ==0) { if(stat == 1) //状态1,受S7控制 { L3 = 0; while(S5 == 0); L3 =1; } else if(stat ==2) //状态2,受S6控制 { L5 = 0; while(S5 == 0); L5 =1; } } } if(S4 == 0) { KEY_Delay(100); if(S4 ==0) { if(stat == 1) { L4 = 0; while(S4 == 0); L4 =1; } else if(stat ==2) { L6 = 0; while(S4 == 0); L6 =1; } } } } void InitSystem() //关闭外设,LED上电后为全灭状态 { SelectHC573(5); P0 = 0x00; SelectHC573(4); P0 = 0xFF; } void main() { InitSystem(); while(1) { KEY_Alone(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
(四)矩阵键盘
01 矩阵键盘的基本应用
矩阵键盘扫描,按键控制数码管第一位显示
#include <reg52.h> /*打开头文件后发现没有对C3、C4的引脚P4的定义 需要自己添加,头文件中P3为0xb0,所以可以定一P4为0xc0*/ sfr P4 = 0xc0; sbit R1 = P3^0; sbit R2 = P3^1; sbit R3 = P3^2; sbit R4 = P3^3; sbit C1 = P4^4; sbit C2 = P4^2; sbit C3 = P3^5; sbit C4 = P3^4; unsigned char SMG_duanma[18]={ 0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90, 0x88,0x80,0xc6,0xc0,0x86,0x8e, 0xbf,0x7f}; void SelectHC573(unsigned char channel) { switch(channel) { case 4: P2 = P2 & 0x1f | 0x80; break; case 5: P2 = P2 & 0x1f | 0xa0; break; case 6: P2 = P2 & 0x1f | 0xc0; break; case 7: P2 = P2 & 0x1f | 0xe0; break; } } void Delay(unsigned char t) { while(t--); } void SMG_Display(unsigned char dat) { SelectHC573(6); //只在第一位显示 P0 = 0x01; SelectHC573(7); P0 = dat; } unsigned char Key_Num; void ScanKey_DisplayNum() { //扫描第一行 R1 = 0; R2 = R3 = R4 =1; C1 = C2 = C3 = C4 =1; if(C1 == 0) { Delay(100); //按键延时消抖 if(C1 == 0) { while(C1 == 0); Key_Num = 0; SMG_Display(SMG_duanma[Key_Num]); } } else if(C2 == 0) { Delay(100); //按键延时消抖 if(C2 == 0) { while(C2 == 0); Key_Num = 1; SMG_Display(SMG_duanma[Key_Num]); } } else if(C3 == 0) { Delay(100); //按键延时消抖 if(C3 == 0) { while(C3 == 0); Key_Num = 2; SMG_Display(SMG_duanma[Key_Num]); } } else if(C4 == 0) { Delay(100); //按键延时消抖 if(C4 == 0) { while(C4 == 0); Key_Num = 3; SMG_Display(SMG_duanma[Key_Num]); } } //扫描第二行 R2 = 0; R1 = R3 = R4 =1; C1 = C2 = C3 = C4 =1; if(C1 == 0) { Delay(100); //按键延时消抖 if(C1 == 0) { while(C1 == 0); Key_Num = 4; SMG_Display(SMG_duanma[Key_Num]); } } else if(C2 == 0) { Delay(100); //按键延时消抖 if(C2 == 0) { while(C2 == 0); Key_Num = 5; SMG_Display(SMG_duanma[Key_Num]); } } else if(C3 == 0) { Delay(100); //按键延时消抖 if(C3 == 0) { while(C3 == 0); Key_Num = 6; SMG_Display(SMG_duanma[Key_Num]); } } else if(C4 == 0) { Delay(100); //按键延时消抖 if(C4 == 0) { while(C4 == 0); Key_Num = 7; SMG_Display(SMG_duanma[Key_Num]); } } //扫描第三行 R3 = 0; R1 = R2 = R4 =1; C1 = C2 = C3 = C4 =1; if(C1 == 0) { Delay(100); //按键延时消抖 if(C1 == 0) { while(C1 == 0); Key_Num = 8; SMG_Display(SMG_duanma[Key_Num]); } } else if(C2 == 0) { Delay(100); //按键延时消抖 if(C2 == 0) { while(C2 == 0); Key_Num = 9; SMG_Display(SMG_duanma[Key_Num]); } } else if(C3 == 0) { Delay(100); //按键延时消抖 if(C3 == 0) { while(C3 == 0); Key_Num = 10; SMG_Display(SMG_duanma[Key_Num]); } } else if(C4 == 0) { Delay(100); //按键延时消抖 if(C4 == 0) { while(C4 == 0); Key_Num = 11; SMG_Display(SMG_duanma[Key_Num]); } } //扫描第四行 R4 = 0; R1 = R2 = R3 =1; C1 = C2 = C3 = C4 =1; if(C1 == 0) { Delay(100); //按键延时消抖 if(C1 == 0) { while(C1 == 0); Key_Num = 12; SMG_Display(SMG_duanma[Key_Num]); } } else if(C2 == 0) { Delay(100); //按键延时消抖 if(C2 == 0) { while(C2 == 0); Key_Num = 13; SMG_Display(SMG_duanma[Key_Num]); } } else if(C3 == 0) { Delay(100); //按键延时消抖 if(C3 == 0) { while(C3 == 0); Key_Num = 14; SMG_Display(SMG_duanma[Key_Num]); } } else if(C4 == 0) { Delay(100); //按键延时消抖 if(C4 == 0) { while(C4 == 0); Key_Num = 15; SMG_Display(SMG_duanma[Key_Num]); } } } void InitSystem() { SelectHC573(5); P0 = 0x00; SelectHC573(4); P0 = 0xff; } void main() { InitSystem(); //关闭外设 while(1) { ScanKey_DisplayNum(); //矩阵键盘扫描,数码管显示相应数字 } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
(五)中断系统与外部中断
01 外部中断基本操作
主程序:L1闪烁
中断服务函数:L8亮一段时间
方法1
#include <reg52.h> sbit L1 = P0^0; sbit L8 = P0^7; void SelectHC573(unsigned char channel) { switch(channel) { case 4: P2 = P2 & 0x1f | 0x80; break; case 5: P2 = P2 & 0x1f | 0xa0; break; case 6: P2 = P2 & 0x1f | 0xc0; break; case 7: P2 = P2 & 0x1f | 0xe0; break; } } void Delay(unsigned int t) { while(t--); while(t--); } void working() { SelectHC573(4); L1 = 0; Delay(60000); L1 = 1; Delay(60000); } //============================= void Init_INT0() //中断函数初始化 { IT0 = 1; EX0 = 1; EA = 1; } void Service_INT0() interrupt 0 //中断服务函数 { L8 = 0; Delay(60000); Delay(60000); Delay(60000); Delay(60000); Delay(60000); Delay(60000); L8 = 1; } //================================ void InitSystem() { SelectHC573(5); P0 = 0x00; SelectHC573(4); P0 = 0xff; } void main() { InitSystem(); Init_INT0(); while(1) { working(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
方法2
简化中断服务函数(中断函数要快进快出)
注意!!!
注意!!!
注意!!!
方法2并没有实现符合要求的中断,中断里仅仅对L8状态赋值,然而while中依旧遵循在执行完working()以后,才会执行控制L8相关函数(即必须在L1灭的状态之后才可以控制L8)
方法1才是符合要求的中断,实现了在中断中就直接对L8进行控制(即在L1灭或亮的状态下都可以控制L8)
注意!!!
注意!!!
注意!!!
#include <reg52.h> sbit L1 = P0^0; sbit L8 = P0^7; void SelectHC573(unsigned char channel) { switch(channel) { case 4: P2 = P2 & 0x1f | 0x80; break; case 5: P2 = P2 & 0x1f | 0xa0; break; case 6: P2 = P2 & 0x1f | 0xc0; break; case 7: P2 = P2 & 0x1f | 0xe0; break; } } void Delay(unsigned int t) { while(t--); while(t--); } void working() { SelectHC573(4); L1 = 0; Delay(60000); L1 = 1; Delay(60000); } //============================= void Init_INT0() { IT0 = 1; EX0 = 1; EA = 1; } unsigned char stat = 0; void Service_INT0() interrupt 0 { stat = 1; } void LEDINT() { if(stat == 1) { L8 = 0; Delay(60000); Delay(60000); Delay(60000); Delay(60000); Delay(60000); Delay(60000); L8 = 1; stat = 0; } } //================================ void InitSystem() { SelectHC573(5); P0 = 0x00; SelectHC573(4); P0 = 0xff; } void main() { InitSystem(); Init_INT0(); while(1) { working(); LEDINT(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
(六)定时器
01 定时器的基本原理与应用
定时器T0的模式1,实现以下功能
每隔1s,L1闪烁1次,即亮0.5s,灭0.5s
每隔10s,L8闪烁1次,即亮5s,灭5s
#include <reg52.h> sbit L1 = P0^0; sbit L8 = P0^7; void Select_HC573(unsigned char channel) { switch(channel) { case 4: P2 = P2 & 0x1f | 0x80; break; case 5: P2 = P2 & 0x1f | 0xa0; break; case 6: P2 = P2 & 0x1f | 0xc0; break; case 7: P2 = P2 & 0x1f | 0xe0; break; } } //================================ void Init_Time0() { TMOD = 0x01; //模式1,16位无自动重装 /* TMOD只能高四位控制T1,此处不需要,所以全部置0 低四位控制T0,且使用模式1*/ TH0 = (65535-50000) / 256; //高8位 TL0 = (65535-50000) % 256; //低8位 ET0 = 1; //T0的中断允许 EA = 1; //总中断 TR0 =1; //定时器0运行控制 } unsigned char count = 0; unsigned char count1 = 0; void Service_Time0() interrupt 1 { Select_HC573(4); TH0 = (65535-50000) / 256; //模式1无自动重装,中断服务函数需重新赋初始值 TL0 = (65535-50000) % 256; count++; count1++; if(count == 10) { L1 = ~L1; count = 0; } if(count1 == 100) { L8 = ~L8; count1 = 0; } } //================================= void Init_System() { Select_HC573(5); P0 = 0x00; Select_HC573(4); P0 = 0xff; } void main() { Init_Time0(); Init_System(); while(1) { } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
02 定时器的进阶综合案例
分、秒、毫秒显示
00-00-00
#include <reg52.h> sbit S4 = P3^3; sbit S5 = P3^2; unsigned char SMG_duanma[12]={ 0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90, 0xbf,0x7f}; unsigned char min; unsigned char sec; unsigned char msec; void Select_HC573(unsigned char channel) { switch(channel) { case 4: P2 = P2 & 0x1f | 0x80; break; case 5: P2 = P2 & 0x1f | 0xa0; break; case 6: P2 = P2 & 0x1f | 0xc0; break; case 7: P2 = P2 & 0x1f | 0xe0; break; } } void SMG_bit(unsigned char pos,unsigned char dat) { Select_HC573(6); P0 = 0x01 << pos; Select_HC573(7); P0 = dat; } void SMG_Delay(unsigned int t) { while(t--); } void SMG_Display() { SMG_bit(7,SMG_duanma[msec%10]); SMG_Delay(500); SMG_bit(6,SMG_duanma[msec/10]); SMG_Delay(500); SMG_bit(5,SMG_duanma[10]); SMG_Delay(500); SMG_bit(4,SMG_duanma[sec%10]); SMG_Delay(500); SMG_bit(3,SMG_duanma[sec/10]); SMG_Delay(500); SMG_bit(2,SMG_duanma[10]); SMG_Delay(500); SMG_bit(1,SMG_duanma[min%10]); SMG_Delay(500); SMG_bit(0,SMG_duanma[min/10]); SMG_Delay(500); } //==========定时器相关函数================ void Init_Time0() { TMOD = 0x01; //模式1,16位无自动重装 TH0 = (65535-50000) / 256; //高8位 TL0 = (65535-50000) % 256; //低8位 ET0 = 1; //T0的中断允许 EA = 1; //总中断 TR0 =1; //定时器0运行控制 } /*可以用烧录软件生成蓝桥杯规定的12MHz下的定时器配置, 再自己添加定时器中断使能和总中断。 void Init_Time0() //50毫秒@12.000MHz { AUXR &= 0x7F; //定时器时钟12T模式 TMOD &= 0xF0; //设置定时器模式 TL0 = 0xB0; //设置定时初始值 TH0 = 0x3C; //设置定时初始值 TF0 = 0; //清除TF0标志 TR0 = 1; //定时器0开始计时 ET0 = 1; EA = 1; } */ void Service_Time0() interrupt 1 { TH0 = (65535-50000) / 256; TL0 = (65535-50000) % 256; msec++; if(msec == 20) { sec++; msec = 0; if(sec == 60) { min++; sec = 0; } if(min == 99) min = 0; } } //================================= void Key_Delay(unsigned int t) { while(t--); } void Key_fun() { if(S4 == 0) { Key_Delay(100); //延时消抖 if(S4 == 0) { TR0 = ~TR0; //暂停或启动 while(S4 == 0) //松手检测,数码管仍动态显示 { SMG_Display(); } } } if(S5 == 0) { Key_Delay(100); //延时消抖 if(S5 == 0) { min = sec = msec = 0; //复位 while(S5 == 0) { SMG_Display(); } } } } void Init_System() { Select_HC573(5); P0 = 0x00; Select_HC573(4); P0 = 0xff; } void main() { Init_Time0(); Init_System(); while(1) { SMG_Display(); Key_fun(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
(七)脉冲宽度调制(PWM)
01 脉宽调制信号的发生与控制
S7控制L1调节三种亮度,10%、40%、90%
脉宽信号频率为100Hz(即信号周期为10ms=10 000us,将一个周期分为100份,每份100us)
#include <reg52.h> sbit L1 = P0^0; sbit S7 = P3^0; void Select_HC573(unsigned char channel) { switch(channel) { case 4: P2 = P2 & 0x1f | 0x80; break; case 5: P2 = P2 & 0x1f | 0xa0; break; case 6: P2 = P2 & 0x1f | 0xc0; break; case 7: P2 = P2 & 0x1f | 0xe0; break; } } //============定时器相关函数============== void Init_Time0() { TMOD = 0x00; //模式0,16位自动重装,中断服务函数中不用再重写了 TH0 = (65535-100) / 256; TL0 = (65535-100) % 256; ET0 = 1; EA = 1; //TR0定时器0控制位放在按键函数中 } unsigned char count = 0; unsigned char pwm_duty = 0; void Service_Time0() interrupt 1 { count++; if(count == pwm_duty) { L1 = 1; } else if(count == 100) { L1 = 0; count = 0; } } //======================================== void Key_Delay(unsigned char t) { while(t--); } unsigned char stat = 0; //状态变量 void Key_Fun() { Select_HC573(4); if(S7 == 0) { Key_Delay(100); //延时消抖 if(S7 == 0) { switch(stat) { case 0: L1 = 0; TR0 = 1; //开启定时器0运行控制位 pwm_duty = 10; stat = 10; break; case 10: pwm_duty = 40; stat = 40; break; case 40: pwm_duty = 90; stat = 90; break; case 90: L1 = 1; TR0 = 0; //关闭定时器0运行控制位 stat = 0; break; } while(S7 == 0); //检测松手 } } } void Init_System() { Select_HC573(5); P0 = 0x00; Select_HC573(4); P0 = 0xff; } void main() { Init_System(); Init_Time0(); while(1) { Key_Fun(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
(八)串口通信
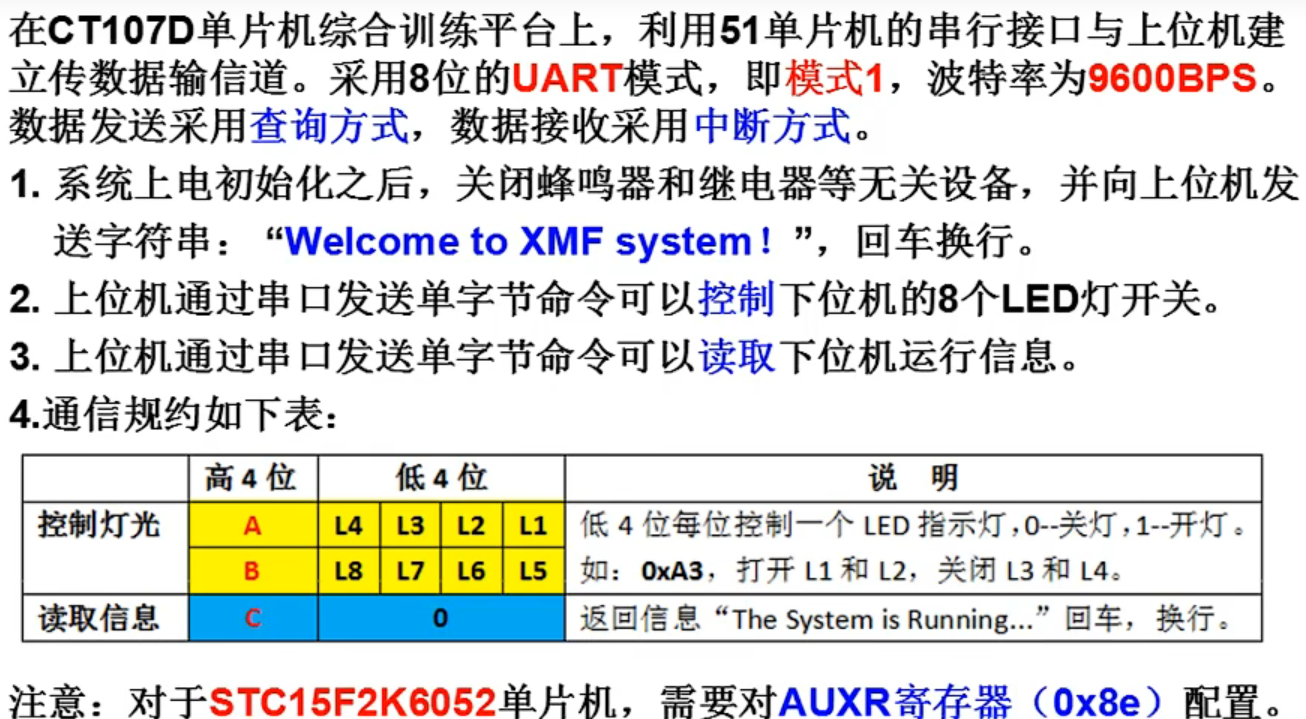
01 串口通信基本原理应用
- Send_Byte()函数需要重新上电才能执行
- 串口中断,串口接收完完整的一帧数据自身产生的中断,配置使能该中断后,串口会判断总线上一个字节的时间间隔内有没有再次接收到数据(即if(RI == 1)),如果没有则当前一帧数据接收完成,产生中断。
#include <reg52.h> sfr AUXR = 0x8e; //定义辅助寄存器 void Send_Byte(unsigned char dat); //声明数据发送函数(因数据接收函数在发送函数之前要调用发送函数) void Select_HC573(unsigned char channel) { switch(channel) { case 4: P2 = P2 & 0x1f | 0x80; break; case 5: P2 = P2 & 0x1f | 0xa0; break; case 6: P2 = P2 & 0x1f | 0xc0; break; case 7: P2 = P2 & 0x1f | 0xe0; break; } } //============中断接收函数=============== void Init_Uart() { TMOD = 0x20; TH1 = 0xfd; TL1 = 0xfd; TR1 = 1; SCON = 0x50; AUXR = 0x00; ES = 1; EA = 1; } unsigned char urdat; void Service_Uart() interrupt 4 //数据接收(中断方式) { if(RI == 1) { RI = 0; //软件复位 urdat = SBUF; Send_Byte(urdat + 1); } } //=================================== void Send_Byte(unsigned char dat) //数据发送(轮询方式) { SBUF = dat; //SBUF 串口数据缓冲寄存器 while(TI == 0); //如果数据已发送则TI为1,跳出此循环 TI = 0; } void Init_System() { Select_HC573(5); P0 = 0x00; Select_HC573(4); P0 = 0xff; } void main() { Init_System(); Init_Uart(); Send_Byte(0x5a); Send_Byte(0xa5); while(1); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
02 串口通信的进阶应用
开关反转
在原理图中LED亮为0,灭为1
但若是题目要求亮为1,灭为0
以ax为例
改变低4位,保留高4位
0 | any = any
1 | any = 1
0 & any = 0
1 & any = any
- 一般由于程序初始化设置,LED上电后为灭状态,即P0 = 0xff(1111 1111)
- P0 | 0x0f ——>
高4位不变,低4位为1(1111 1111)- ~command | 0xf0 ——>command按位取反,再使高4位为1,
低4位不变(1111 xxxx)- P0 = (P0 | 0x0f) & (~command | 0xf0) ——>两式相与(1111 xxxx)
#include <reg52.h> sfr AUXR = 0x8e; //定义辅助寄存器 void Select_HC573(unsigned char channel) //锁存器选择函数 { switch(channel) { case 4: P2 = P2 & 0x1f | 0x80; break; //控制LED case 5: P2 = P2 & 0x1f | 0xa0; break; //控制蜂鸣器、继电器 case 6: P2 = P2 & 0x1f | 0xc0; break; //数码管com共阳公共端 case 7: P2 = P2 & 0x1f | 0xe0; break; //数码管段码端 } } //==============串口数据接收中断=================== void Init_Uart() //中断初始化函数 { TMOD = 0x20; //定时器1 TH1 = 0xfd; //设置波特率为9600 TL1 = 0xfd; //11.0592M或12M的12分频 SCON = 0X50; //串口参数为模式1且允许接收 AUXR = 0x00; //bit7=1:定时器1不分频,0则12分频 TR1 = 1; //启动定时器1 ES = 1; //使能串口中断 EA = 1; //打开总中断 } unsigned char command = 0x00; //注意赋初值为16进制 void Service_Uart() interrupt 4 //中断服务函数 { if(RI == 1) //收到一个完整字节 { command = SBUF; //将SBUF缓冲器中数据赋值给command RI = 0; //人工清零 } } //================================================= void SendByte(unsigned char dat) //发送数据函数 { SBUF = dat; //将数据放入SBUF缓冲器 while(TI == 0); //如果成功发送数据,则TI为1跳出此循环 TI = 0; //人工清零 } void SendString(unsigned char *str) //发送字符串函数 { while(*str != '\0') //判断指针是否指向字符串结束符 { SendByte(*str++); //先执行SendByte(*str),赋值完成后,指针++移向下一位 } } void Working() { Select_HC573(4); //控制LED if(command != 0x00) { switch(command & 0xf0) //高4位不变,低4位清零 { case 0xa0: P0 = (P0 | 0x0f) & (~command | 0xf0); command = 0x00; //避免重复执行working函数 break; case 0xb0: P0 = (P0 | 0xf0) & ((~command << 4)| 0x0f); command = 0x00; break; case 0xc0: SendString("The System is Working Normally..."); command = 0x00; break; } } } void Init_System() //程序初始化 { Select_HC573(5); P0 = 0x00; Select_HC573(4); P0 = 0xff; } void main() { Init_Uart(); Init_System(); SendString("Welcome to the System...\r\n"); while(1) { Working(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
(九)IO / 存储扩展
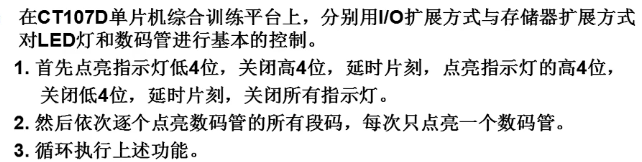
IO扩展(J13接2~3脚 IO模式)
#include <reg52.h> void Select_HC573(unsigned char channel) { switch(channel) { case 4: P2 = P2 & 0x1f | 0x80; break; case 5: P2 = P2 & 0x1f | 0xa0; break; case 6: P2 = P2 & 0x1f | 0xc0; break; case 7: P2 = P2 & 0x1f | 0xe0; break; } } void Delay(unsigned int t) { while(t--); while(t--); } void LED_Display() { Select_HC573(4); P0 = 0x0f; Delay(60000); Delay(60000); P0 = 0xf0; Delay(60000); Delay(60000); P0 = 0xff; Delay(60000); Delay(60000); } void SMG_Display() { unsigned char i; for(i = 0;i < 8; i++) { Select_HC573(6); P0 = 0x01 << i; Select_HC573(7); P0 = 0x00; Delay(60000); Delay(60000); } P0 = 0xff; Delay(60000); Delay(60000); } void Init_System() { Select_HC573(5); P0 = 0x00; Select_HC573(4); P0 = 0xff; } void main() { Init_System(); while(1) { LED_Display(); SMG_Display(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
存储扩展(J13接1~2脚 MM模式)
#include <absacc.h> void Delay(unsigned int t) { while(t--); while(t--); } void LED_Display() { XBYTE[0x8000] = 0x0f; Delay(60000); Delay(60000); XBYTE[0x8000] = 0xf0; Delay(60000); Delay(60000); XBYTE[0x8000] = 0xff; Delay(60000); Delay(60000); } void SMG_Display() { unsigned char i; for(i = 0;i < 8; i++) { XBYTE[0xc000] = 0x01 << i; XBYTE[0xe000] = 0x00; Delay(60000); Delay(60000); } XBYTE[0xe000] = 0xff; Delay(60000); Delay(60000); } void Init_System() { XBYTE[0xa000] = 0x00; XBYTE[0x8000] = 0xff; } void main() { Init_System(); while(1) { LED_Display(); SMG_Display(); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
本文内容由网友自发贡献,转载请注明出处:https://www.wpsshop.cn/w/菜鸟追梦旅行/article/detail/560779
推荐阅读
相关标签

