
热门标签
热门文章
- 1Java代码审计——Commons Collections LazyMap调用链_common collections链 lazymap
- 2Java中redis设置过期时间_Redis的hashes如何设置过期时间
- 3使用阿里云DSW微调ChatGLM3-6B_阿里云服务器部署chatglm3-6b
- 4分布式版本管理系统---->Git(Linux---centos(保姆式)讲解1)_centos git命令
- 52024年Web前端最新跨平台应用开发进阶(三十六) :uniapp使用uni,前端中高级面试题
- 6推荐一款轻量级C++ HTTP服务器库:httpserver.h
- 7harmonyOS鸿蒙官网教程-Video组件的使用_video组件可以支持本地视频路径和网络路径播放
- 8mybatis源码解析之基础模块-TypeHandler_@mappedtypes({object.class}) @mappedjdbctypes(jdbc
- 9多模态融合(五)Dynamic Fusion with Intra- and Inter-modality Attention Flow for Visual Question Answering
- 10毕业设计:基于信息安全的恶意流量检测系统_流量检测系统毕设
当前位置: article > 正文
智能车大赛ROS仿真和基于yolo识别物体(仿真实现2019年室外光电创意组比赛)_ros和yolo识别电梯按钮
作者:菜鸟追梦旅行 | 2024-05-24 21:49:46
赞
踩
ros和yolo识别电梯按钮
一、准备工作
首先你得有一个ros的工作空间,如果没有就创建一个工作空间,步骤如下
1、创建racecar_ws和src文件夹
mkdir -p ~/racecar_ws/src
- 1
- 2
src文件下以后可以存放我们所有的资源,mkdir命令用于创建文件夹,-p表示同时创建子目录,而racecar是我们ros的工作区间。
2、初始化工作空间
cd ~/racecar_ws/src
catkin_init_workspace
- 1
- 2
- 3
3、克隆程序并编译
git clone https://github.com/xmy0916/racecar.git
cd ..
catkin_make
- 1
- 2
- 3
- 4
- 5
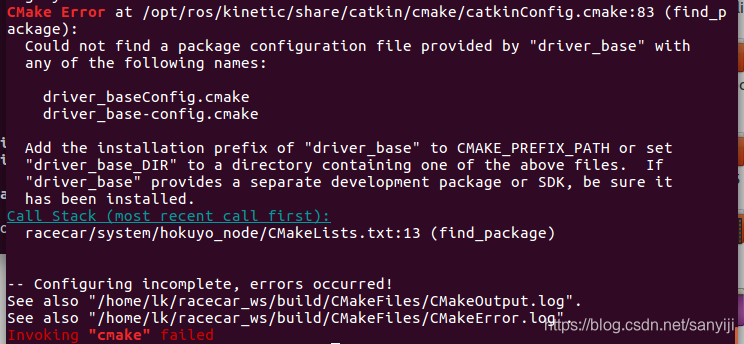
编译如果出现上面这个问题的,可以下载控件解决。
sudo apt-get install ros-kinetic-driver-base
sudo apt-get install ros-kinetic-gazebo-ros-control
sudo apt-get install ros-kinetic-effort-controllers
sudo apt-get install ros-kinetic-joint-state-controller
sudo apt-get - 1
- 2
- 3
- 4
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/菜鸟追梦旅行/article/detail/619220
推荐阅读
相关标签

