
- 1FPGA之JESD204B接口——总体概要 实例 下_hmc7044驱动
- 2YOLOv10改进 | Conv篇 |YOLOv10引入SPD-Conv卷积
- 3NLP中的Attention机制_attention机制 nlp
- 42024年,CSDN积分怎么获取_csdn积分在哪里兑换
- 5SAP ABAP开发过程中内表的概念及操作详解之三_table函数
- 6win11设置mysql开机自启_windows11设置服务自启动
- 7ARM开发入门
- 8低代码:美味膳食或垃圾食品?
- 9求职面试中如何做好自我介绍?_面试怎么做自我介绍csdn
- 10【权限提升】Linux Kernel 权限提升漏洞 (CVE-2023-32233)_linux kernel权限提升漏洞
【智能汽车,未来最强的算力终端】-转载_有器无23d0ee
赞
踩
1 百年汽车产业的重塑
汽车产业历经百年沉淀,已跨越“机械定义-硬件定义”的鸿沟,而在技术迭 代下的“新四化”浪潮正推动其进入“软硬件共同定义”的智能化时代。作为继智 能手机后,移动互联网浪潮下又一划时代的产物,智能汽车是人工智能、软件、半 导体、汽车、新能源、通信等诸多行业集聚半个多世纪成果的“核聚变”,是下一个十年最大的科技浪潮,而在此过程中,无论是产业格局还是其价值链都将迎来史 诗级的变革,同时其所孕育的投资机会也将会比10年前智能手机产业链更加惊人。
1.1 透视分层结构下的主机厂困境
纵观汽车架构的发展,僵化的分布式构造使得产业链逐渐固化,并形成以 Tier1 为核心的链式结构,而其对主机厂的自主变革形成掣肘,局限性也逐渐凸显。当前 传统主机厂仍面临着较多困境,唯有乘“新四化”东风“软化”自身,以打破传统 产业链,并将其重塑为以主机厂为中心的多维网状结构,才有机会占据产业链变革 中的价值制高点。
汽车发明之初,多由小型工坊自行制造、拼装而成,其仅具备必要的电气组件, 直至福特汽车发动“流程革命”才使得规模化生产变为可能。此时,汽车产业尚处 于“机械定义”阶段,即,其仍为各类元件拼装而成的机械产品,仅能凭借机械动力性能满足用户最基本的代步需求,无其他“附加”功能。而在该阶段下,主机厂 通常凭借自身在机械设计、动力设备或生产工艺方面的积累独立生产,以形成独特的“产品竞争力”。
通信技术革命是驱动汽车从“机械定义时代”跨向“硬件定义时代”的底层支 撑,消费者需求的井喷则从上层拉动产业实现跨代。在“机械定义时代”,汽车仅 具备车灯等最为基础的电气设备,直至车载收音机作为第一款电子零部件装配至汽车,其才由简单的“机械产品”迭代为“机械-电子产品”。但随着媒体设备、排放电子模块等功能性模块的增加,ECU、传感器等电子元件的数量急剧增加,硬件 成为汽车架构中最主要的部分。在此背景下,受制于单点通信方式的局限性,布线 系统为实现各硬件间的信息传输,只能选择被动性的叠加,从而导致了装配成本过高、总重量超重等问题。为了解决这一矛盾,车载总线技术诞生,推出了 CAN/LIN/Flex Ray/MOST等多种标准的总线链路,并允许相关硬件在同一总线 链路下,实现数据以及功能的共享与传输,从而有效降解了原有布线系统的复杂性, 提升了数据的传输效率。至此,汽车进入“硬件定义时代”。
总线技术虽然从物理层面优化了汽车硬件配置的布局,但其仍存在明显的局限性,即,ECU 数量的叠加导致支线链路复杂性不断提升,总线将不堪重负,从 而引发车辆出现信息传输等多方面的故障。同时,软硬件的高度耦合使得主机厂无 法自主进行软件迭代,Tier1 供应商成为产业链中的核心角色。在“硬件定义时代”, 主机厂受制于其自身研发能力的薄弱,同时考虑到包揽所有开发工作所带来的成本耗费,更多选择依赖于具备较强研发能力的 ECU 供应商。
但在分布式架构下, 由于一个 ECU 对应一个功能,且往往带有嵌入式的软件系统,这就导致了在此阶段,汽车软硬件之间呈现高度的耦合。而相较于产品内在的变化,我们更需要, 在此架构背后所映射的产业链议价权的改变,是供应商话语权的加速提升,主机厂 只能被动局限于零部件的整合工作。在此阶段,主机厂不再是产业链中的唯一核心, 而是由各级供应商和主机厂共同组成了完整的产业链,形成了“主机厂-Tier1- Tier2/ Tier3”合作模式,而强耦合的软硬件将产业链上的各角色逐渐固化,使得 主机厂无法自主地进行产品迭代。

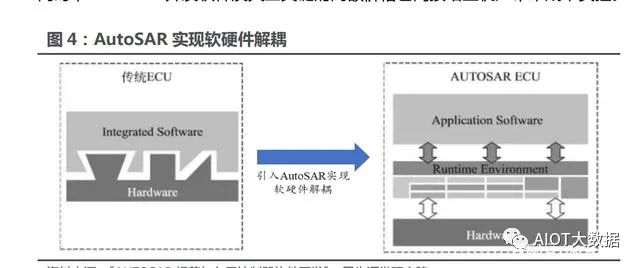
AutoSAR 的出现,虽然初步实现了软硬件的解耦,但未从根本上对产业链产 生“革命性”的影响。在传统分布式架构下,各层级的供应商将不同的零配件提供 给 Tier1 进行装配生产,并由其向主机厂直接提供成品,但由于上游零部件和其自身技术路线不同,各 Tier1 的 ECU 产品接口及底层软件均有差异,导致汽车底层 软件重复的问题凸显,资源利用率较低。在此背景下,AutoSAR 的成立,使不同 结构的 ECU 软硬件接口实现了统一,并驱动了应用层与软硬件层实现初步解耦, 以增加应用软件的可扩展性、可移植性和复用率,主机厂也因此获得一定程度的 “解放”。但基于传统分布式架构所产生的 AutoSAR 具有局限性,各厂商对 AutoSAR 规范理解的不一致导致软件模块复用率的提升不显著,鲜明的“硬件定 义”特征并未从根本上改变主机厂在产业链中作为“零部件整合商”的弱势地位。同时,AutoSAR 开发软件及其工具链的高额价格也间接给主机厂带来成本负担。
历经百年发展,高度固化的传统汽车产业链并未因总线技术或 AutoSAR 规范 等技术性的维新而发生革命性变化,Tier1 供应商仍旧作为定义功能的角色掌握产 业链制高点,传统主机厂仍面临诸多困境:
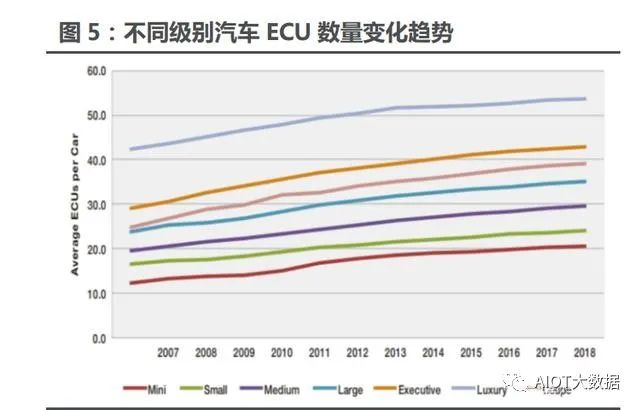
成本困境:在渐进式而非变革式的技术升级及需求升级下,传统主机厂采用分 布式架构是历史情境下的最优解,但随着消费者对于汽车功能需求的升维,分布式 架构使主机厂陷入多方面的成本困境中:为丰富汽车的功能,主机厂只能不断堆砌 供应商提供的 ECU 以满足迭代需求,但 ECU 的叠加使得主机厂也面临着高昂的 硬件成本与供应链管理压力。
传统的 ECU 除实现具体功能的应用软件外,仍存在众多底层软件来保障 ECU 的正常运行,但不同供应商的 ECU,其底层软件的重复性较高,且无法实现跨模 块的使用,这也使得主机厂为适配不同零部件,需要在 CAN 收发、电源管理等底层软件上承担大量的“重复”开发费用。根据产业链调研,分布式架构下主机厂需 面临约 30%-40%的重复开发工作,同时复用率较低的软件也抬升了主机厂的后期 维护升级成本。
此外,ECU 数量的增加使数据传输所需的线束长度与成本也随之增加,为主 机厂带来成本与重量的双重压力。总线技术仅能优化 ECU 干线线束部分,繁复的 支线链路仍旧是沉重负担。根据佐思汽研的测算,如果沿用目前的分布式架构,自 动驾驶汽车的线束成本将不会低于 1000 美元,而其重量可达 100 公斤(特斯拉 全新的布线架构已将 Model Y 的线束长度降低至 100 米,总重量也仅约 1 公斤)。
盈利困境:传统主机厂盈利模式单一,仅靠降本增效难以熨平营收的周期性波 动。传统汽车制造业属于周期性行业,行业景气度与宏观经济的波动周期存在明显 的正相关性,传统车企价值的实现方式为一锤子式的硬件销售,其收入=汽车销量 *单车收入,产品售出后主机厂难以再通过其他方式获利。当前汽车产业正在经历“硬件商品化”过程,一些传统机械零件正加速商品化和白标化,即,硬件所能实 现的差异性越来越小,硬件销售的利润越来越薄。

1.2 架构迭代:“从硬到软”的重塑
1.2.1 智能汽车的架构进阶
智能网联化引领行业变革,EE 架构将向集中式推进,“软硬件共同定义时代” 全面来临。在“新四化”背景下,以特斯拉为首的新势力率先启动变革,并将倒逼 传统主机厂进行架构革新。根据博世提出的“分布式-(跨)域集中-中央计算平台 架构”的演进构想,汽车架构将由传统的分布式架构向模块化、集成化的域集中式 架构开始演变。即,将大量相同功能的 ECU 进行整合,并交由域控制器进行统一 的管理调度,使开发人员能完全独立于底层硬件,进行上层软件的开发,以实现软 硬件解耦范围的进一步扩大,以及内在数据的集中交互和决策处理。此时, AutoSAR 也随之升级为 Adaptive AutoSAR,以适应新的智能化集中式 EE 架构。
1.2.2 架构迭代下产业链的重组
汽车 EE 架构的演化驱动汽车产业经历从一个企业做车(机械定义)-一个产 业做车(硬件定义)-多个产业做车(软硬件共同定义、生态定义)的演变,供应 链形态也经历了从“点-线-面”的迭代。
在“机械定义汽车的时代”,往往由一个企业进行汽车制造,但随着功能的增 加,“硬件定义汽车时代”到来,汽车系统逐渐变得复杂,配套供应商等角色的参 与,组成了完整的汽车产业链,形成了“主机厂-Tier1-Tier2/ Tier3”垂直合作 模式。但由于分布式架构的开发高成本与技术短板,主机厂主要依赖于 Tier1 实现 汽车产品复杂功能的落地,自身只需解决好传输网络、车身管理等整车适配问题, 即“整车功能的实现=N* Tier1(软硬件解决方案)”,却也在一定程度上限制了主 机厂自主定制开发的权利。
传统供应链格局被颠覆,软件实力成为制胜关键。在”软硬件共同定义时代“, EE 架构逐步升级为集中式架构,软硬件的解耦从软件应用层的分离到整个软件架 构的打通,软件成为主机厂实现创新的突破口。此时,主机厂已不再满足于传统的 “黑盒模式”,希望借此加强自身的软件能力,积极变革转型,凭借全栈式软件能 力锁定产业链中的高利润环节。在此趋势下,汽车产业过去所依赖的共享成本、共 摊风险的“主机厂-供应商联盟”的模式将被打破,产业链也将被重塑,而具备自 主研发能力的主机厂可跨过 Tier1直接与具有软件实力的Tier2合作,带动了Tier2 地位向 Tier1 转移,从而打破了原有传统的垂直供应链格局,并将其塑造为扁平化 网状模式,即“整车功能的实现=主机厂(软件)+Tier1(软件/硬件)/Tier2”。
科技公司入局,成为供应链中新一代 Tier1。以华为、BAT 为代表的科技巨头, 利用自身技术的优势切入智能汽车领域,通过为主机厂提供智能汽车解决方案、增 量部件、开源软件平台等方式与其进行开放合作,形成优势互补、多方合作的产业 布局。同时,原本处于 Tier2 位置的软件企业可能跃升至 Tier1,甚至 Tier0.5,或 将成为智能汽车产业链中强有力的竞争者。

在产业链变革的同时,主机厂其自身的组织架构也将由“以开发新品为核心” 向“以提供服务为核心”转变。在传统产业链中,主机厂的组织架构多为垂直体系, 设计、研发、销服等职能部门间联通性差,难以快速响应客户需求升级。但在“软 硬件共同定义时代”,主机厂可通过功能/软件的 OTA 升级来获取稳定的收益,而 新功能的快速开发/迭代,将推动其进行组织架构的变革,由垂直体系向扁平化发 展,并以各事业部为基本单位,以贴近用户需求实现转型。(报告来源:未来智库)
1.3 智能化:汽车“价值”的胜负手
1.3.1 万亿市场的“阿基米德支点”
汽车的单体价值量远超于手机,其所带来的产业性机会更为明显。智能手机的 市场规模远远不及传统汽车市场,根据 IDC、国际汽车制造商组织的资料显示,其 通过手机出货量与汽车出货量进行测算,结果显示传统汽车的市场规模(1.8 万亿 美元)已是智能手机(5000 亿美元)的 3 倍以上。我们在结合以上数据,以及对于智能汽车趋势的理解下进行综合判断,认为在“新四化”的背景下,随着智能网 联化的驱动,智能汽车的市场规模不仅仅只是延续,更有望实现大幅的超越,而软 件的价值将是其中最大的增量。
在智能网联化驱动下,EE 架构的革新驱动汽车价值的重心从硬件向软件转变, 软件成为智能汽车产业的关键,驱动软件市场规模的增长。在 Automotive News Europe 资讯中 NVIDIA 创始人兼首席执行官黄仁勋表示:“汽车制造商的业务模 式将从根本上发生改变。到 2025 年,许多汽主机厂业很有可能以接近成本价的价 格销售汽车,并主要通过软件为用户提供价值。”

汽车价值链呈现“总量上升,重心后移”趋势,其价值从硬件-软硬件-服务不 断延伸。传统汽车作为载人交通工具,主要聚焦于整个汽车制造价值链条。而在智 能汽车的驱动下,汽车围绕着移动终端进行角色转换,提升设计研发、后市场服务 等环节的软件价值,促进其产业的“微笑曲线”不断向后端延伸,形成“制造+服 务”的价值链条。其中,服务的增加不仅仅只存在于曲线后端,而是长期贯穿于汽 车的全生命周期,推动汽车产业价值总量上升。
1.3.2 以智能化为名,拥抱“座舱、自驾“硬核时代
根据上文中的分析,“在新四化”趋势下,整车可主要分为动力总成域、底盘 域、车身域、智能座舱域和自动驾驶域这 5 大功能域。其中,智能座舱域、自动驾 驶域作为差异化的“新兴域”,亦是汽车智能化体现的焦点:
智能座舱:“第三空间”的延展,以生态的构建为核心。智能座舱的发展受益于 整车架构的升级,进而实现软硬解耦以及多屏间的高效互动,并通过融合及处理 “语音、视觉”等感知数据,赋予车辆智能互动、实时监控、应用联动等能力。相 较于自动驾驶,智能座舱将更多体现的是“第三空间”的延展,以及长续的生态构 建,其实现的难度相对较低且性价比更高。受益于消费者对于汽车舒适性安全性诉 求的日益增长以及消费电子产品应用场景的逐步迁移,其将有望迎来更快的渗透。
2 智能座舱:始于互联网,进击元宇宙
2.1 重新定义:始于互联网,进击元宇宙
智能座舱将从“创新-迭代-颠覆”演化,以实现最终在元宇宙中的进击。其中, “创新”,即对内革新了座舱配置,以实现车内场景化+多模态交互;对外则以“网 联化”为主轴,贯通了各 AIoT 终端间的互联,以最终达到“交互与生态”的重塑;“迭代”,即通过架构的革新,驱动汽车属性从“功能机-智能机”蜕变,无论是硬 件端的多屏联动,亦或是软件端的娱乐/网联功能的完善,均能实现常用常新;而 “颠覆”,则是打破了智能座舱的生态边界,使其成为智能家居、智能手机、可穿 戴设备等 AIoT 终端的生态入口,以脱离时间/空间的边界,最终或成为元宇宙下 的智能载体。

智能座舱打开了元宇宙的任意门,成为了连接三维物理世界和元宇宙的超级 智能硬件。基于配置的升维,智能座舱拥有了语音识别、手势控制等“立体感”的 内在交互方式,同时与多类智能终端进行联动,拓宽了外在的交互边界,使得乘客 成为了“终极操控者”。而通过架构的迭代,未来座舱域或将与自驾域配合以实现 司机“乘客化”,即司机在座舱内即可享受 ADAS 功能所带来的“双手自由”。此 时,智能座舱作为“移动的第三空间”,具备了元宇宙所需的交互、娱乐、网联的 软硬件生态,并且在此过程中所产生的数据也成为了刻画出元宇宙的“马良之笔”。在 2021 年 9 月慕尼黑车展前夕,宝马集团推出了元宇宙虚拟世界 JOYTOPIA, 且用户无需用户名和密码就可以进入 JOYTOPIA 的世界,不仅可以欣赏英国知名 摇滚乐队的演唱会,还可以通过自身对应的虚拟人积极参与到活动中。
2.2 横向:配置的升维,功能性的横向延展
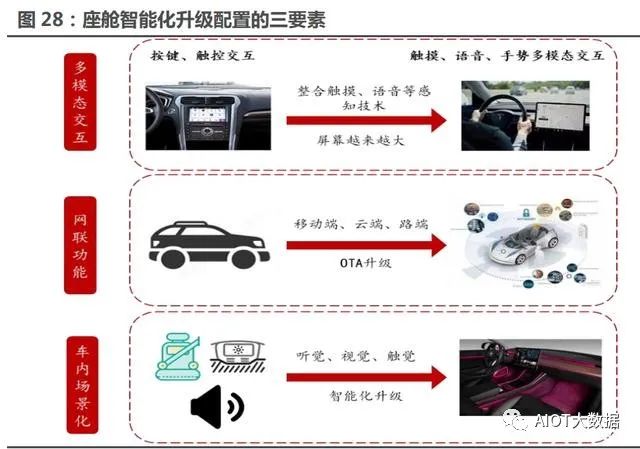
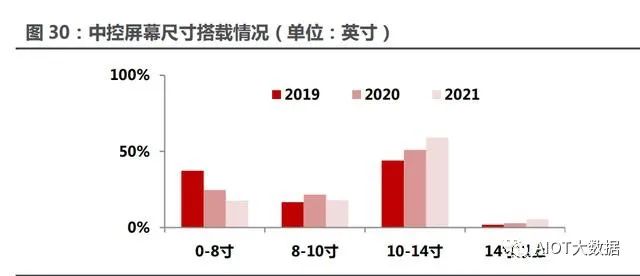
“多模态交互+网联功能+车内场景化”化身为座舱智能化的名片,加速了配 置的全面升维。其中,多模态交互:中控大屏的出现使得交互方式从按键向触控升 级,但对于屏幕触控反馈的迟缓和视觉占用也在潜移默化中影响着驾驶安全。因此, 智能座舱的交互模式进一步向触摸-语音-手势等多模态的交互方向演化,以提高人 车交互效率;网联功能:网联化的“枝蔓”将智能汽车的互联范围从车内进一步延 伸至移动端、云端、路端等多终端,并以此通过 OTA 创造了软件及服务盈利的消 费价值;车内场景化:即实现座椅、氛围灯、声学系统的智能化升级,从而打造听 觉、视觉、触觉等多维度的立体感,给予用户最直接的智能化体验。基于此,智能 座舱将通过交互的升级、网联的连接、场景的完善奠定了智能化的终局。
2.2.1 交互:多屏化实现了内在交互的延伸
交互方式的升级驱动“多屏化”趋势逐渐显现。智能座舱在早期即延伸了智能 手机单点触控的方式,但初时仍极易出现触控反馈迟缓和视觉占用问题。因此,座 舱的交互模式向“触摸-语音-手势”等多模态方向演化,并倒逼了内在配置的全面 升级。其中,中控屏幕、仪表盘、后视镜等“标配化”产品进一步进阶为“智能化” 产品,并纳入 HUD(抬头显示器)、后座显示屏等 HMI 多屏幕以赋予用户全面的 视觉交互盛宴。
在“多屏化、联屏化“趋势下,车载显示信息的冗余易产生分散驾驶员注意力 等安全隐患,车载 HUD 应运而生。HUD 是通过将行驶速度、导航等重要行车信 息投影到风挡玻璃上,使驾驶员在不低头的情况下能够看到重要行车信息以提高 驾驶安全性。HUD 最早出现在 80 年代末,并于 2001 年、2004 年,通用和宝马 分别推出了彩色 HUD,搭载于其高端车型内;现阶段,HUD 通过与头部车企合作 打开市场,已经在高端车型上实现普及,但整体搭载率仍处于较低水平。但我们认 为,随着技术逐步成熟,成本进一步的降低,未来五年 HUD 将有望从高端车型向 中低端车型加速渗透。
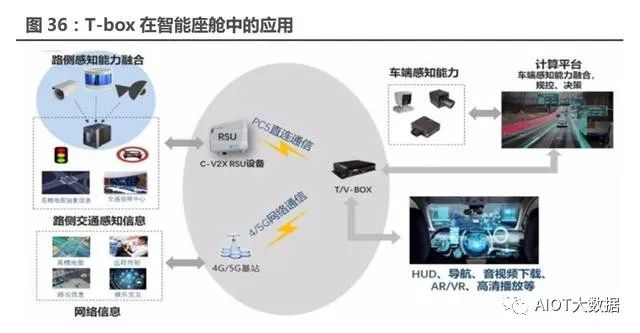
2.2.2 网联:T-Box 助力座舱外在的互联
T-box 作为网联化功能实现的必要条件,成为万物互联的最优解。T-Box,即 Telematics-Box,又称 TCU(车联网控制单元),指安装在汽车上用于控制跟踪汽 车的嵌入式系统,包括 GPS 单元、移动通讯外部接口电子处理单元、微控制器、 移动通讯单元以及存储器。T-Box 主要用于车辆和后台系统/手机 APP 通信,实现 手机 APP 的车辆信息显示与控制。即,当用户通过手机端 APP 发送控制命令后, TSP 后台会发出监控请求指令到车载 T-box,车辆在获取到控制命令后,通过 CAN 总线发送控制报文并实现对车辆的控制,最后反馈操作结果到用户的手机 APP 上, 可以帮助用户远程启动车辆、打开空调、远程解锁、远程座椅加热等。
国内 T-Box 参与者有华为、联友科技、德赛西威、东软、均联智行等。其中, 华为从通讯芯片到模组、T-Box 进行了垂直布局,并借助在 5G 芯片上的先发优 势,推出了 5G 车载模组 MH5000、5G 车载终端 T-Box 平台,且在 5G 模组及 T-Box 前装市场实现首发量产,陆续搭载于广汽新能源 Aion V、比亚迪汉、北汽 ARCFOX αT 等车型;联友科技(东风汽车下属科技公司)的 4G T-Box 在国内最 快突破百万台量产数量,目前已出货 270 万+,且 5G C-V2X T-Box 于 2021 年 8 月量产上车。
2.2.3 场景化:内饰配置的升维构筑座舱场景化的升级
氛围灯、声学系统、座椅等内饰装置构筑了车内立体场景,赋予了用户在消费 体验上的升维。其中,氛围灯作为装饰与指示的结合体,一方面,通过不同种类的 灯光载体以及色彩变化可以营造出科技感、未来感的氛围效果;另一方面,利用氛 围灯控制器对不同的氛围灯节点进行精准控制,并在高算力的 ECU 连接和高效率 的 CAN 总线传输下,可以实现与驾驶员场景相匹配的智能环境感知控制。例如, 2021 年发布的奔驰 S 级主动式环境氛围灯的光线可覆盖所有乘客,并根据车内的 香薰味道、音乐风格、天气状况自动调整色调,以帮助车内乘客获得更加舒适的乘 坐体验。

全球扬声器市场格局以欧美开放系与日韩封闭系两大主机厂阵营进行划分, 国内厂商仍处于起步阶段。其中,欧美系是以福特、大众、通用集团等欧美主机厂 为代表,对于产业链中的供应商选择持有开放态度,主要有普瑞姆、艾思科集团、 丰达电机等国外厂商;日韩系则是以丰田和现代汽车为代表的日韩主机厂,扬声器 供应商首选本土厂商,较为封闭,以丰达电机、先锋电子厂商为主;而国内厂商仍 聚焦于中低端市场,但未来随着产品质量、客户粘性,以及新能源汽车自主品牌出 货量的提升,国内供应商的份额将有所提升。目前,比亚迪、蔚来、理想等多个主 机厂已经开始采用国内厂商的扬声器进行装配。

2.3 纵向:架构的革新,生态级的纵向优化
2.3.1 硬件架构:座舱底座“攻坚战”
座舱域芯片:“智能化、网联化”为关键指标
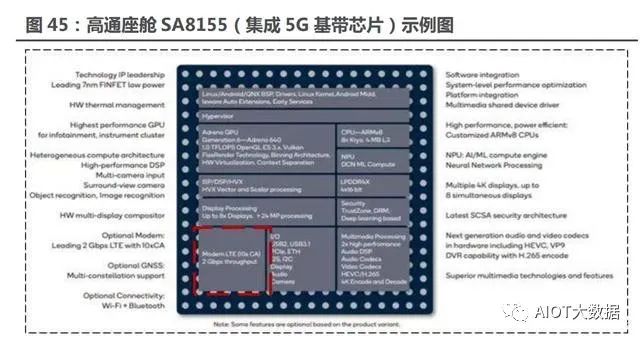
车载屏幕作为人车交互最直接的触点,将从单屏逐渐扩展到中控屏、仪表、 HUD等多个屏幕,而为了实现各屏间的互联互通与较高的交互效率,“一芯多屏”、 “多任务并发”方案有望成为主流。同时,为了强化与云端、车端间的交流,智能 座舱的联网功能也将进一步完善,而座舱芯片作为支撑功能运行的底座,在座舱域 中的具体要求即是实现“智能化、网联化”两大关键性指标。其中,“智能化”的 体现,即是在“一芯多屏”架构下多样化、复杂化的交互任务和多并发车载应用的 处理能力,其背后是以高算力作为支撑点;而“网联化”则是在基于车联网生态下, 座舱内部与车端、路端等外部的交互能力,具体表现则是 5G Modem 技术的延 展。
此外,对于座舱中的娱乐信息系统而言,车载应用通常为多任务并发形式,因 此芯片的多重并行计算能力愈发重要。同时,叠加应用的高并发+图像显示的高标 准(即图像显示复杂度、精细度和实时性),将驱动 GPU 逐渐从 CPU 中分化为图 像专用的处理器以承载其所需的高性能计算能力,以及较高的渲染能力。其中,对 于 3D 图像效果,200GFLOPS 以上即能满足 3 个屏幕以上的图像显示,而针对 GPU 进行图像算法处理,则需要 500GFLOPS。此外,针对座舱内生物识别、语音 控制等交互功能,以及座舱内氛围灯、声学等感知系统,高性能的 AI 处理器将协 助加速处理感知任务以提高芯片运算速度,即对应芯片的 NPU 赋能将成为芯片架 构中的附加分。基于此,高算力“CPU+GPU(+NPU)”组合将成为主机厂在算 力赛中的重要底牌。

网联化:5G 通信技术成为座舱芯片网联性能提升的关键因素。在传统座舱阶 段,导航地图等功能的离线导致定位的准确度差等问题显现,且无法流畅地实现手 机端与车机端的互联。因此,为了加强座舱内部与多智能终端,甚至云端、路端等 外部的联系,SoC 芯片还将集成通信单元以保证车辆在行驶过程中的连续性。而 在此背后,成熟的通信技术是决定其联网性能的关键。相较于 4G 通信技术,5G 通信的高速率、低延时和广覆盖的特性更能够满足智能座舱域控制器的海量数据 的联系,更符合“传输趋势”。
此外,根据我们产业链调研发现,单芯片的性能并非主机厂考虑的唯一要素, 除了智能化和网联化的能力外,技术支持、产品规划、价格(性价比)、安全等级 也会纳入考虑范围。其中,技术支持方面:较强的本地化技术支持能够加快问题反 馈速度,以扩大芯片使用周期、保障芯片高效运行。
座舱域控制器:解耦趋势下的谋进
智能汽车 EE 架构的革新集合了相同功能的 ECU,产生了不同的域,而域控制 器成为了相同功能的集中营。其中,智能座舱控制器主要负责汽车座舱电子系统, 其不仅融合了中控屏、液晶仪表、HUD、流媒体后视镜等交互硬件,同时集成了 T-Box 等网联设备,以及氛围灯、声学系统、座椅控制器等场景化内饰。基于此, 座舱域控制器不仅需要高算力的主控芯片等硬件支撑不同功能的运算,同样也需 要操作系统、中间件、应用算法等软件的结合。
此外,在芯片适配能力:主机厂受制于不同的硬件配置及软件配套,导致开发 成本较高,因此具有良好适配能力的域控制器厂商更易受到主机厂青睐。在产业发 展前期,“芯片-域控制器-主机厂”供应链条中,域控制器 Tier1 的定位除提供集 成能力外,还在于为芯片厂商提供必要的市场客户资源和供应链整合能力。目前部 分国外核心座舱芯片厂商,因其传统业务重心的不同,导致短期内恐暂不具备对国 内市场进行完全自主推广的能力,而传统头部 Tier1 深耕行业和区域多年,与多家 当地主机厂均已形成成熟的合作关系,加之头部行业地位使得其也具备对供应链 上下游良好的掌控力。但长期看,“芯片商-域控制器商”的耦合关系容易导致主机 厂难以在软硬解耦的发展趋势下具备快速的迭代效率。此时,座舱域控制器厂商若 具备适配不同芯片平台的能力,则能够帮助主机厂降低底层设计的复杂度、节省开 发成本、提高量产效率,以实现全面解耦下后续车型中功能的“自我定义”和“差 异化开发“。因此,具备与不同芯片高适配度的域控制器厂商或将在主机厂的筛选 中脱颖而出。

底层软件能力:软件差异化潮流驱动座舱域控制器厂商智能升级,Tier1 负责 范围从域控制器硬件设计和生产向中间件 Middleware 软件部分延伸,为主机厂 展开上层应用差异化竞争赋能。在智能化时代下,座舱域控制器厂商除了作为主要 的板级供应商外,还演变为了基础软件供应商,其主要工作为硬件-操作系统-应用 软件的对接,便于让主机厂自定的操作系统得以在硬件层面跑通,进行应用定制化 开发。
2.3.2 软件架构:牟定“生态”,差异化竞争
软硬件加速分离,推动软件架构升级为计算平台。EE 架构向集中式开始演化, 域控制器方案的出现,将彻底弱化底层 ECU 的运算能力,将功能的处理统一交付 于域控制器进行控制。这一方式的实施,将有利于实现底层资源的标准化、通用化, 并进一步降低了软硬件间的耦合度,将解耦范围从应用软件层的分离拓展至整个 软件架构,使其独立于硬件之上,发展为由“芯片-Hypervisor-操作系统-中间件 -算法”构成的计算平台。

Hypervisor:实现多个操作系统融合的重要“沟通者”
Hypervisor 承担着分配硬件资源,融合多个操作系统的职责。Hypervisor 运 行于硬件设备与操作系统之间,在虚拟化环境中,Hypervisor 可调度 CPU 内核、外部设备、内存区域等硬件资源,并为每个虚拟机分配不同资源。同时,在 Hypervisor 协调控制下,多个操作系统在硬件方面实现资源共享共用,在软件方 面保持独立、互不干涉。即,当其中一个操作系统出现软件出现故障时,其他操作 系统仍可继续正常运行。
在智能座舱中,功能的多样化需要不同级别的操作系统支持,如仪表、DMS 等功能需要安全性较高的 QNX 操作系统,而针对信息娱乐功能,则需生态较好的 Android 系统。但由于技术的局限性,不同的操作系统只能分别装置于不同的芯 片中,易造成内部功能联动性较差的局面,因此引入 Hypervisor 作为硬件层和操 作系统之间的“沟通者”,帮助其灵活配置多个操作系统运行在一个域控制器上, 高效地协调座舱内不同功能以提高硬件利用率。目前,常见的 Hypervisor 包括 黑莓 QNX、英特尔 ACRN、Mobica 的 XEN、大陆 L4RE 等,其中 QNX 是唯一 通过 ASIL-D 的安全合规水平以及预认证水平的管理程序,具有高性价比和高安 全性的优势,因此,QNX Hypervisor 逐渐成为市场的主流。
操作系统:智能座舱的生态“定义者”
智能座舱作为“第三空间”的底座,构建起“内外延展”的车机生态。随着汽 车在“互联时代-智能时代-AIoT 时代”的不断迭代,其产品属性也将实现从“载 人工具”向“移动第三空间”的转变。我们认为,车机生态正迈入“内外延展”的 新纪元,其将在应用生态的基础上,具备全面联动的特点,即向外实现车机与 AIoT 终端的广泛互动,对内实现座舱应用(长期还需与 ADAS 联动)的功能,进而给 予用户持续升维的使用体验。
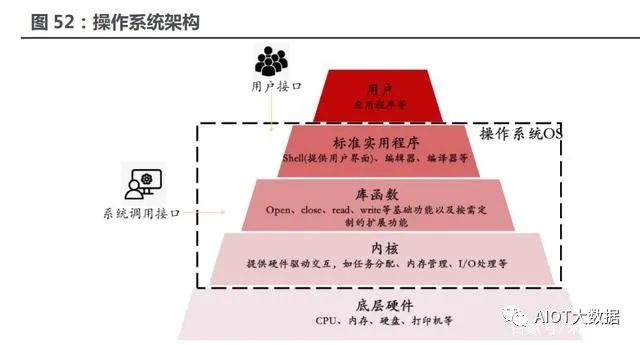
底层车机 OS 把握内核,成为各类操作系统的“基石”。在操作系统架构中, 内核提供了最为基础的功能,即对内负责协调进程和管理软硬件资源,对外提供接 口以实现交互,从根本上决定了系统的性能和稳定性。结合上文中的分类,底层车 机 OS 是从“内核到组件”都进行了重塑,顶层车机 OS 则是沿袭了底层操作系统 的内核,仅对应用程序框架层或 UI 界面进行修改,保留了原有系统的主要功能和 特性。因此,底层车机 OS 把握内核成为各类操作系统的“基石”,较顶车机 OS 更加具备主导作用。
中间件:负责应用软件之间的通信及底层资源的“调度者”
中间件隔离了底层硬件与应用层,成为软硬件解耦的关键角色。中间件作为独 立于操作系统之上,应用软件之下的标准软件框架,包含了计算资源与网络通信协 议栈。其通过对传感器、计算平台等资源进行抽象,对算法、子系统、功能采取模 块化的管理,为用户提供统一接口,帮助其灵活、高效地开发和集成复杂的应用软件。对于主机厂来说,其通过中间件可将不同的硬件配置进行统一的定制化开发, 然后根据需求进行应用层的拓展,以此来提高上层软件开发效率。
AutoSAR 作为中间件方案的“明星产品”,为适配集中式架构的高算力需求, 逐渐向 Adaptive AutoSAR 迭代。AutoSAR 是由丰田、宝马、大众、福特、戴 姆勒、通用、博世和 PSA 等汽车巨头在 2003 年成立的联盟,旨在为汽车 ECU 提供标准化的开放软件架构。而为了应对集中式架构下所需的高性能配置,其架构 也将从最初的 Classic AutoSAR 进一步扩展为 Adaptive AutoSAR,用于协调在 异构软件平台下各域间的信息交互,以支持用户应用程序的动态部署,并为后续汽 车架构向 SOA 迭代制定标准。目前,AutoSAR 解决方案厂商包括博世、大陆、 西门子、Wind River、Vector、KPIT 等国外厂商,国内主要有中科创达、东软睿 驰、诚迈科技、华为、未动科技等多家软件供应商基于 AutoSAR 架构提供具有差 异化的中间件解决方案。
算法模块:主机厂进行差异化竞争的焦点
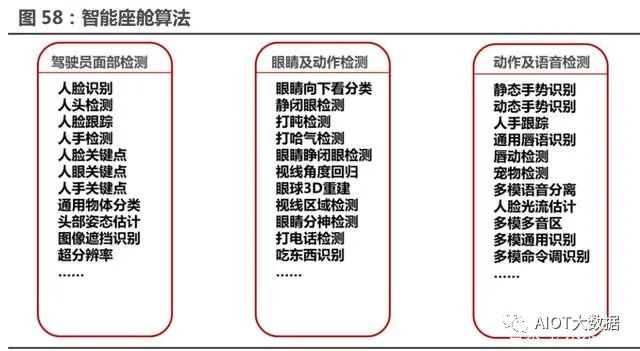
智能座舱算法主要分为四类:1)驾驶员面部识别类:包含人头识别、人眼识 别、眼睛识别等;2)驾驶员动作识别类:手势动作识别、身体动作识别、嘴唇识 别等;3)座舱声音识别类:前排双音区检测、声纹识别、语音性别识别/年龄识别等;4)座舱光线识别类:座舱氛围灯、座舱主体背景、座舱内饰等。并且,随着 智能化、差异化的升级,对应的算法模块将进一步增加。
在智能座舱集成多样化的场景性需求下,其将更聚焦于为用户提供多模态的 交互方式。我们以交互算法为例,其中包括了,语音交互、动作识别(手势、姿态 等)、生物识别(人脸、指纹等)、行为识别(如 DMS)等。而相较于其他交互模 式,语音交互已实现了从单一模态向多模态的延伸,且完成了被动式向主动式的转 换,其技术能力更趋于成熟。2017 年,Google 就表示其语音识别的准确率已达 到 95%的水平,而科大讯飞语音识别的准确率也于 2018 年超过了 98%。目前, 各大厂商的语音交互技术,如 Google Now、百度语音、微软 Cortana 等已广泛 应用到汽车行业中。同时,科大讯飞也于 2018 年颁布了其“AI+V2H”方案,在 基于其语音交互技术及 AI 能力下,综合多种内容生态及出行生态,形成了人、车、 家之间跨场景的智能交互闭环。在供应商方面,目前科大讯飞具备相对优势。
HMI:软件架构设计成长的第二曲线
交互功能作为座舱智能化的起点,不再局限于“大屏化”、“联屏化”的屏幕界 面交互设计,而是逐渐渗透至座舱的功能集,进行一体化交互体验的升维。基于此, HMI 作为用户与车机系统之间交互的媒介,囊括了 UI(界面设计)和 UX(用户 体验)两大“秘密武器”。其中,UI 是针对中控、仪表等屏幕的界面,以及车载信 息娱乐系统中 APP 的显示等图形设计;UX 则是侧重于座舱内功能逻辑设计,以 保证功能产品的易用性与流畅性。
HMI 交互界面产品由硬件和软件两部分组成:1)硬件:由处理器、显示单元、 输入单元、通讯接口、数据存贮单元等部件组成,而处理器的性能决定了 HMI 产 品的性能高低,是 HMI 的核心单元,并根据 HMI 的产品等级不同,处理器可分 别选用 8 位、16 位、32 位、64 位的处理器;2)软件:HMI 软件包含运行于 HMI 硬件中的系统软件,以及运行于 PC 机操作系统下的画面组态软件。使用者都必须 先使用 HMI 的画面组态软件制作“工程文件”,再通过 PC 机和 HMI 产品的串行 通讯口,把编制好的“工程文件”下载到 HMI 的处理器中运行。同时,用户在使 用 HMI 期间所产生的行为数据,将通过云端建立识别模型,并不断循环迭代提高 识别准确率,比如语音语义理解、手势识别等,用户使用体验将愈加良好。
HMI 开发工具市场参与者众多,国内市场被中科创达(Kanzi)占领。目前, HMI 设计工具的主要玩家包括中科创达(Kanzi)、Qt、Elektrobit、Altia、CRANK、 Epic Games、Unity 等。其中,中科创达通过收购 Kanzi 切入该领域,Kanzi One 是全球首个与安卓完全兼容的汽车 HMI 工具链,目前 Kanzi 全球市场份额高达 40%以上;Qt 的产品使用范围很广,涉及汽车、医疗、消费电子等诸多领域的 HMI 设计,提供了库,工具,硬件适配和现成的解决方案的全面基础架构,支持任何平 台;Elektrobit 致力于为汽车行业提供嵌入式互联软件产品和服务的全球性供应商, HMI 方面的产品主要为 EB GUIDE 工具链。同时,某些游戏科技的 HMI 设计公 司也正向车载市场进发,如 Epic Games 旗下的 Unreal Engine、Unity 等均加速 布局车载市场。

3 决战自动驾驶元年:”感知-决策-执行”的解构
3.1 自动驾驶:第三空间下的“隐形司机”
自动驾驶:百年汽车工业的“升维”攻坚战。在自动驾驶时代中,汽车已不再 只是交通工具,而是用户的“第三空间”。高等级自动驾驶意味着手、脚、眼和注 意力将逐步被解放,从“机器辅助人开车”(L2)到“机器开车人辅助”(L3),再到 “机器开车”(L4/L5)意味着车主的生产力、时间的释放,汽车将不再只是代步工 具,用户在车内即可实现娱乐和办公,汽车有望进化成为家庭、办公场所之外移动 的“第三生活空间”。
自动驾驶被重新被定义,L3 是自驾能力的分水岭。结合美国 SAE 以及我国工 信部下发的《汽车驾驶自动化分级》,自动驾驶是指汽车本身能够持续地执行部分 或全部动态驾驶任务,使得驾驶的角色从人转移到自动驾驶系统。根据系统完成驾 驶任务的程度、角色分配以及运行范围限制,又将驾驶自动化分成 0-5 级。其中, 从全球范围而言,当前大规模量产的车型仍搭载 L2 级别以及 L2+的系统,L4 级 别目前处于测试、或在限定区域限定人群的小范围应用阶段,而处于过渡阶段的 L3 级自动驾驶系统标志着驾驶权正式从人移交到自动驾驶系统,成为自驾能力的 “分水岭”。但是,L3 级自动驾驶技术受到技术、法规等制约,目前仍未能大规模 量产落地,仅搭载在小批量车型之上,或者部分 L3 级别功能在 L2+的车上体现。

3.2 感知层:自动驾驶之眼
智能传感器是感知层的核心组成,由其获取的数据是自动驾驶系统的“认知起 点”。感知层主要是通过传感器,即摄像机、激光雷达、毫米波雷达等,代替人的 “视觉”和“听觉”,以采集周围行驶环境信息和车内信息,并在高精度地图及定 位的辅助下获取系统地理位置,实现环境感知、车身感知。自动驾驶系统通过感知 获得众多原始数据,形成“认知起点”,即整个自驾系统以此为“基石”,进行信息 的处理、决策、执行,最终实现自动驾驶的功能,而在整个感知环节中,传感器承 担着采集原始数据的职责,各司其职构筑起“感知防线”,在整个自动驾驶环节中 占据了举足轻重的地位。
3.2.1 不同内核路线下的“华山论剑”
两大感知路线的角逐:摄像头视觉派 VS 激光雷达融合派。当前,根据主导传 感器类别的不同,较为主流的感知路径可分为两类:一、是以摄像头为主传感器的 视觉派,以高清摄像头获取的路况图像为核心信息,配以毫米波雷达、超声波雷达 等,通过高强度、高效率的算法逻辑,构建基于纯视觉效果的路况模型,因传统视 觉算法成熟,并且成本较低,现已成为了 L0-L2 级别 ADAS 的主流选择;二、是 融合感知的激光雷达派,其以激光雷达捕获到的路况云点图为主干,辅以摄像头、 毫米波雷达、高精度地图等组件的补充信息,将多组传感器数据进行融合以进一步 获取更具安全冗余的路况信息,其因超强的感知能力,多为 L2 级别以上自动驾驶的发展方向。

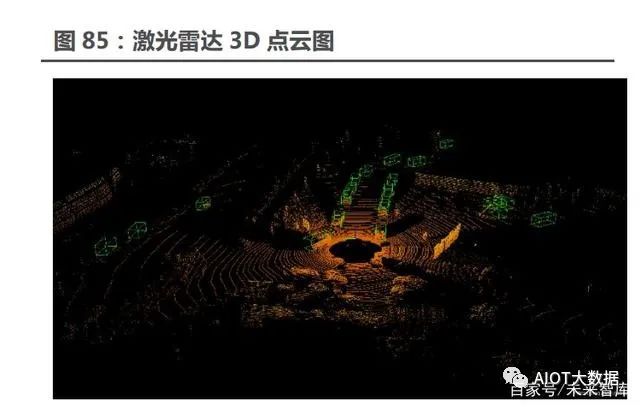
与摄像头视觉派相对应,激光雷达融合派“重感知,轻算法”,即通过构建极 致的感知能力,剑指高阶自动驾驶。相较于摄像头视觉派,激光雷达融合派在自身 能力、辅助工具、传感器融合加持下,将重心前移至绝对感知能力的提升上。首先, 激光雷达与摄像头在“信息捕捉”上的原理不同,激光雷达可直接构建周围环境信 息的 3D 云点图,以达到对于动态障碍物的监测能力,并具备较高的数据可视化程 度以及感知精度;其次,在高精度地图的辅助下,该路线利用高精地图对路况进行 “提前测绘”和“实时更新”,强化了自动驾驶的“记忆”属性,以保证系统在陌 生路况下都具备提前感知和预测的能力;再者,采用激光雷达并不意味着抛弃原有 的传感器,而是以激光雷达 3D 云点图为主导,增加高精地图的“桥梁”,再综合 搭配摄像头、毫米波雷达、超声波雷达、红外装置等传感器,将所有的感知数据进 行汇总融合,以实现对路况的全感知,从而提供充足的安全冗余。
3.2.2 视觉派:以“视觉”为名,部署迎来量价齐升
车载摄像头是视觉派的“核心”。正如上文所述,以特斯拉为首的视觉派认为, 智能汽车应当仿照人类驾驶时的“眼睛-大脑”模式,由摄像头完成环境感知,经 系统分析处理后,从而计算出周围的车辆、道路等信息,实现自动驾驶的功能。因 此,摄像头作为其“首要”传感器,成为视觉方案的核心。
车载摄像头主要实现了“图像采集”和“视觉处理”两大功能。从结构来看, 车载摄像头主要由镜头、图像传感器、图像信号处理芯片和串行器等组成,其工作 原理为,通过镜头捕获目标物体的光信号,经由图像传感器转化为电信号,以实现 图像采集功能,再由图像信号处理芯片进行图像数据的加工处理,转变为特定格式 后,再由串行器传输到中央计算单元后由显示屏实现最终的输出。
数量:智能化将推动单车摄像头的搭载量激增
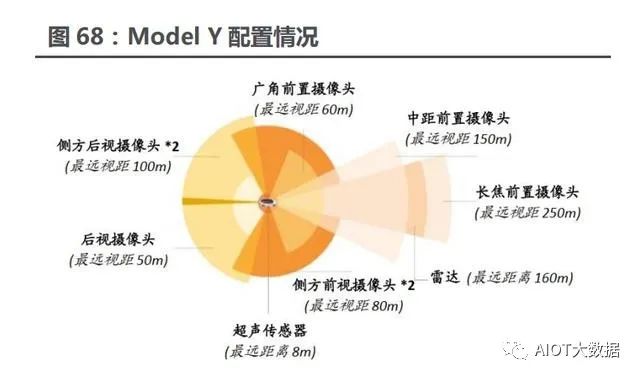
摄像头的单车搭载量将不断提升,出货量也将进入快速增长期。摄像头作为视 觉感知的核心,受益于自动驾驶需求的推动,单车搭载量将不断提升。以特斯拉的 Model Y 为例,其搭载了 8 颗摄像头,大致分布为 3 枚前向镜头、4 枚侧向镜头、 1 枚后向镜头,而其他主流主机厂的自动驾驶车型也均配置 5-15 颗不等数量的车 载摄像头用以辅助感知。(报告来源:未来智库)
价格:短期“去芯化”促使价格下降,长期“高清化”助力价值升维
摄像头向“去芯化、高清化”演变,定位简化为“专攻图像采集”。为了减少 不同计算模块数据处理后的差异,尽可能地保留原有信息,以及考虑到自身散热、 信号传输抗干扰性等问题,摄像头中的 ISP、SoC 等模块将逐渐后移至中央计算 平台之中。即,将图像处理、数据分析等任务从摄像头中剥离,使其仅用于图像采 集的任务。这一方案将极大程度减少算力浪费,使得算力向中央计算平台集中。同 时,随着高级别自驾对周围环境感知要求的提升,摄像头将向“高清化”演变,以 实现其图像采集功能的提升,及探测距离、视场角的“扩充”。以前视摄像头为例,100-200 万像素摄像头有效探测距离在 100-150m,视场角仅 50°左右;但是 800MP 摄像头有效探测距离可达 200-250m,视场角达 120°,同时还具备更高 的动态范围(HDR)和更优的 LED 频闪消除功能(LFM)。
短期来看,“去芯化”或使摄像头的成本下降。从特斯拉现有车型 Model Y 观 察,其三目前视摄像头方案尤其注重图像采集能力和性价比,主动剥离了计算功能 (未配置 SoC、MCU 等计算功能模块),而是将图像处理功能交由 Autopilot 控 制器完成,每个镜头则各自匹配一颗 CMOS 芯片,并将 3 块 CMOS 芯片集成在 一块 PCB 板上。

车载摄像头的产业链涉及上游材料、中游元件和下游产品三个环节,其将随着 “去芯化、高清化”的趋势实现重塑。在上游材料中,光学镜片、滤光片和保护膜 等用于制造镜头组,晶圆用于制造 CMOS 芯片和 DSP 信号处理器;在中游环节:镜头组、CMOS 芯片和胶合材料等组装成模组,并和 DSP 信号处理器封装成下游 的摄像头产品。而随着 “去芯化、高清化”趋势,摄像头定位将转变为“专攻图 像采集”,其产业链也正处于“光学升级”阶段,其价值分布将迎来重塑机会,根 据 SystemPlus 对单个摄像头 BOM 的拆解,图像传感器(CIS)、镜头、车载模组 或将占据整个摄像头成本的 90%左右。
为满足 HDR 及高感光能力的需求,大尺寸像素成为车载 CIS 的必然选择,进 而为其价值增量提供支撑。为确保在复杂路况和恶劣天气下的成像质量,车载 CIS 倾向于更大的像素尺寸,以满足 HDR 及高感光能力的需求:1)满足 HDR (highdynamic range,高动态范围),即成像时能同时看清场景中较暗和较亮的部分, 大像素通过在单个像素上容纳更多的电子,可以有效地保留图像信息,从而实现高 动态范围;2)高感光能力,即在低光照下依然保证较高的成像清晰度,大像素能 解决昏暗环境叠加短曝光时间给车载摄像头带来的挑战,能更有效地捕捉到少量 光子,使车载摄像头在低光照下保持高灵敏度和信噪比,避免在昏暗环境无法识别 周围环境信息。而随着车载 CIS 单个像素增大,其整个芯片尺寸大幅增加,进而使 得其价格不断提升。

镜头:加工难度大,客户认证壁垒较高。由于车载镜头需要具备耐高温、耐磨, 硬度等要求,且在量产前需经过连续数天的水压测试和上千小时温差测试,因此对 于加工的工艺、材料的选择均提出极高要求,整体“制造“难度明显。此外,车载 镜头主要用于保障驾驶的安全性,其客户对其成像效果、机械强度、耐热性、生命 周期等参数都有严格的要求,所以能够顺利进入主机厂供应名单的公司很少,且认 证流程复杂,整个周期约 2-3 年,因此镜头厂商一旦得到车厂认证,即可形成较 强的壁垒,供应链粘性较大,进而具备先发优势的公司容易维持较高的市场份额。
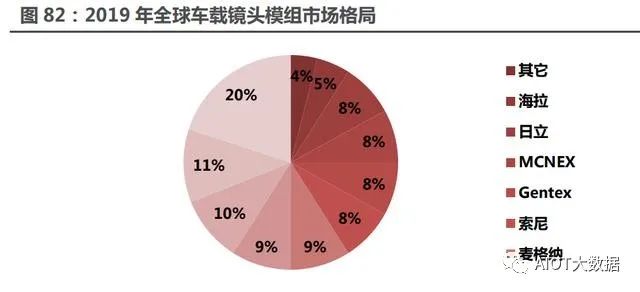
车载模组:市场格局较为分散。车载镜头模组主要由传统 Tier1 完成,海外企 业占据着主要的市场份额,松下为行业龙头,共占据 20%的市场份额,法奥雷、 富士通、大陆、麦格纳等分别占比 11%、10%、9%、9%,整体产业格局相对分 散。
3.2.3 融合派:激光雷达、高精度地图的“跨越式征程”
正如我们上文所述,激光雷融合派是以激光雷达的点云为主导,在高精度地图 的辅助下,综合摄像头、毫米波雷达、超声波雷达等传感器信息,以形成对周围环 境的全面感知方案。其中,激光雷达是感知路线的核心,而高精度地图作为“上帝 之眼”,配合激光雷达实现 3D 定位,两者均占有重要地位,成为区别于视觉路线 差异化的存在。因此,我们将在下文中,对激光雷达、高精度地图进行解读,详解 其发展趋势以及产业链投资机会。
激光雷达:所见即所得,产业链迎来放量元年
激光雷达所见即所得,增强感知冗余性。作为主动感知的传感器,激光雷达可 天然地做到“所见即所得”。即,通过高频激光在“水平和俯仰”的旋转,来获取 大概 150 万个/秒的位置点信息,并根据这些高密度、超清晰的三维点阵而直接构 建 3D 环境模型,还可以根据信号的反射率辨别物体的材质属性,具备更强的障碍 物描述能力。相较于摄像头,其有效避开了摄像头对于数据库和算法的高度依赖, 在 L3 等级智能驾驶中能够加快反应速度,提高系统冗余性;相较于毫米波雷达, 其在探测距离、可靠度、行人判别、夜间出行等方面的指标更优异,因此,主机厂 可以通过加入激光雷达,增强感知系统的冗余性,提高车辆的安全性。
具体来看,基于 OEM 对激光雷达的高性能要求,硬件设计需满足其多维度考核,软件能力成为产品的提振点。
1)硬件设计要求:一般而言,一款能应用于高阶自动驾驶的激光雷达,测距范围通常要 150 米以上,并且针对低反射率的物体 也能做到良好的测量效果(如黑色车辆),近场盲区控制在 0.5 米以内,水平视角 达到 120°以上,并具备 0.2°以上的垂直角分辨率,进而输出高质量点云实现精准 感知。这些高性能要求迫使激光雷达厂商在最初的设计阶段需要进行光、机、电的 协同优化,确定好核心元器件的选型,以最终实现子模块间高度配合进而提升产品 整体性能;
2)软件能力提振:当主机厂面临后端算法能力不足的困境时,协同主 机厂进行点云数据处理、感知算法研发的激光雷达厂商,或能找到自身盈利的第二 增长点。近来,多家激光雷达企业配套推出软件方案提高产品力,如 Velodyne 将 针对 Vela 家族产品配套 Vella 软件,Luminar则提供感知+决策软件方案以形成 全栈式自动驾驶解决方案,速腾聚创则推出对应的感知+理解算法 RS-LiDARAlgorithms。
车规认证是前装量产的最后一环,2020 年后步伐将加快。为了满足前装量产 上车的可靠性要求,车厂要求激光雷达需通过 DV(设计验证)、PV(生产确认) 以及 EMC(电磁兼容性)等标准认证,主要为 ISO26262《道路车辆功能安全》 国际标准,并且还需要进行车规振动、冲击、温度循环等测试试验。据统计,2020 年前激光雷达真正实现车规级量产的仅有法雷奥一家,但是 2020 年后,禾赛科 技、Ibeo、速腾聚创、华为等少部分核心厂商也逐步实现了车规级认证,并且,为 了满足 2022 年含有激光雷达的车型上市时间节点的要求,激光雷达厂商会加快其 认证和测试的步伐。
激光发射系统:多波长共存,激光器向 VCSEL 和光纤激光器演进。当前激光 雷达产品主要使用 905nm 和 1550nm 的激光波长,也有部分企业会采用其它波 段来降低干扰。1550nm 波长的激光对人眼损伤更少,因此可以使用更大的功率 以获得更强的穿透能力,平均发射功率可达 905nm 的 40 倍,但使用 1550nm 激 光所需的光纤发射器和 InGaAs 探测器则更昂贵。目前来看,我们认为采用这两种 波长的产品短时间内将共同存在,采用 1550nm 波长的厂商将致力于降低成本、 推动量产,而采用 905nm 的厂商将致力于在功率限制下获得更好的性能表现。未 来待 1550nm 产业链成熟后,预计会成为主流方案。
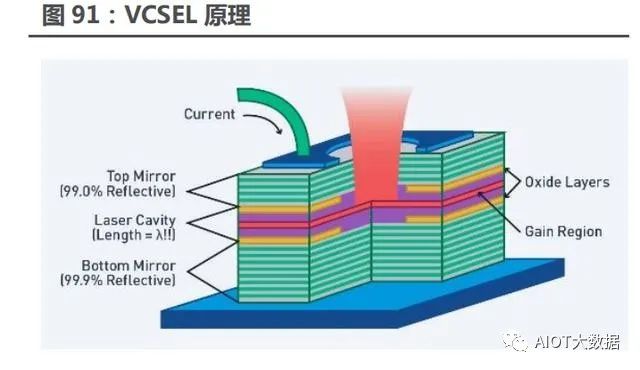
半导体激光器:未来随 VCSEL 技术发展逐渐成熟,车规级激光雷达产品预计 逐步转向 VCSEL 激光器。半导体激光器有 LED、EEL、VCSEL 等,目前主要是 EEL 和 VCSEL 间的竞争,EEL 能量密度和能效更高,VCSEL 在光束整形、集成度、温 漂控制等具备优势。随着 VCSEL 技术迭代,能力密度提高,未来预计渗透率会逐 渐提高。
信息处理系统迭代:从 FPGA+ADC 芯片转向自研 SoC。激光雷达信息处理 系统主要包括主控芯片和模拟芯片,目前主控芯片主要采用 FPGA 芯片,模拟芯 片主要采用 ADC 模数转换芯片。目前市场上以 CMOS 工艺制备的 FPGA 芯片产 品低成本、高算力,且提供可编程硬件,已可以满足多种技术路线的要求。SoC 可 以把探测器、电路、信息处理等多个模块集成到芯片上,使得激光雷达系统集成度 得到明显提升,同时系统复杂度的降低也可以提升良品率,从而推动产品上车量产。
高精度地图:具备“上帝视角”的“引路者”
在自动驾驶时代,“地图”一词已失去了其传统路线图的含义。目前大多数车 载地图的“分辨率”已足够用于导航功能,但若要实现自动驾驶的能力,则需要掌 握更精确、更新的车辆周边环境信息,从而联动其他驾驶辅助系统做出反应。因此, 未来的“地图”指的是非常精准且不断更新的自动驾驶环境模型。即,高精度地图, 而其“高精”之处在于:绝对位置精度一般在 1 米以内,相对位置精度则要求在 20 厘米以内;同时要求拥有对道路状况拥有准确至地表级的信息精度,即包括每 个车道的坡度、曲率、航向、高程、侧倾等多方面的精确数据;在实时性上:传统 导航电子地图的更新频率为永久静态数据或半永久静态数据,而高精度地图对数 据的实时性要求较高,更新频率通常在分钟级别,动态数据更是以秒为单位更新。
为达到如上“高精度”的目标,高精度地图需要通过不同图层的叠加进行信息 的表达。在一张高精地图中,水系、铁路、街区、建筑物可能会分别位于不同图层, 每一个图层可以被理解为一张“透明薄膜”,多图层被绘制叠加后才能真正为感知 方案所用,终端上显示的导航地图往往都是由 10 多层甚至 20 多层不同分辨率的 图片组成,当用户进行缩放时,程序根据缩放级数,选择不同分辨率的瓦片图,从 而拼接成一幅完整的地图。
高精度地图的功能主要定位在“地图匹配、辅助环境感知、路径规划”三个方 面。其中,地图匹配:利用高精度地图进行匹配,将车辆位置精准地定位在车道上, 并排除了各种定位的误差,以提高车辆定位的精度;辅助环境感知:自动驾驶功能 安全的本质即是安全冗余的保障,在多传感器融合感知的背景下,感知能力虽已有 提高,但仍无法排除面对极端情况下导致的传感器失效问题,而高精地图处于感知 层的“上帝视角”,可突破空间、时间的限制,为智能驾驶提供“知识图谱”;路径 规划:帮助制定最优路径,并实现对他车行为和路径相对准确的预测,以实现及时、 准确的反应,从而保证了行驶的安全性。

底图采集:作为地图生产的核心环节,底图采集将直接决定地图的广度和质量, 而采集车就是执行测绘工作的载体。目前主流用于地图底图采集的工具包括专业 级采集车、工业型采集车和众包型采集车。其中,专业级采集车:成本相对较高, 精度可达厘米级;工业型采集车:单车成本适中,精度在 20-50cm 左右;众包采 集车:精度及成本则低于专业型和工业型采集车。这也对应了两种不同的采集模式:即自主采集和众包采集。自主采集,即地图供应商自己组建测绘车队并根据采集需 求对测绘车辆进行一定程度的改造,再自主完成采集的模式;众包采集,则是将测 绘任务派包给拥有实车运行的合作主机厂,由他们进行道路数据的采集,再由此进 行地图信息的建立和补充。
城郊场景:以高速公路、隧道、港口等区域为主,环境主体相对单一且突发型 交通事件相对较少,地图模型建立的难度也相对较低。因此,供应商的先发优势将 成为这一场景下行业地位的主要评价维度。而对于在城郊场景下的新入局者而言, 测绘精度和测绘进度这两个维度的指标将是其取得突破的重要因素:
1)在测绘精度方面:目前高等级的测绘车辆均由图商自行调试设计,新入局 者或将会存在测绘经验不足、长时间调试设备精度的“无效过程”,时间成本将使 得其市场差距被进一步拉开;若采用众包的形式,无论从拥有实车数量,还是从其 采集的精度能力来看,无法使其形成良好的竞争壁垒;
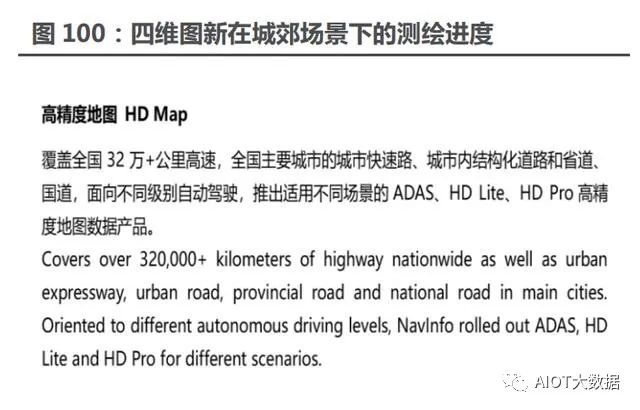
2)在测绘进度方面:目前先发厂商如四维图新、高德地图等,均在测绘区域 范围上具备了较大优势。以四维图新为例,目前其高精度地图已覆盖全国超 32 万 公里高速公路、主要城市的城市快速路和国道、省道等(截至 2020 年底,全国高 速公路总里程约 15 万公里)。同时,其单车测绘设备配备数量、车队配备规模以 及车队协同等方面短时间内复制存在较大难度,高昂的成本投入和前期低水平的 投报比也将限制其他企业的战略选择。
在核心供应商尚未对城市级别高精度地图底图信息采集形成突出先发优势的 大背景下,结合以上供需端难点,我们认为率先取得突破的厂商将具备如下要素:初期底图测绘阶段需具备测绘资质以及“规模级”的自备车队和专业人员配置,城 市级底图的采集早期将由图商自行组建车队,并协同众包采集进行,而测试车队的 规模和能力就将是提升测绘范围和精度的核心要素。
具体来看,测绘甲级资质是其采集的前提,而持续大规模的资金投入则是必要 的支持条件:1)测绘甲级资质已在国家战略下将逐步放开,或将导致地图供应商 将进入这一市场;2)更新自备车队设备、扩充车队规模、维持大量测试人员开支 等,则要求持续的、大规模的资金投入。以测试人员的开支为例,目前由于自动化 采集的准确率还无法达到百分之百,因此人工校验的环节必不可少。
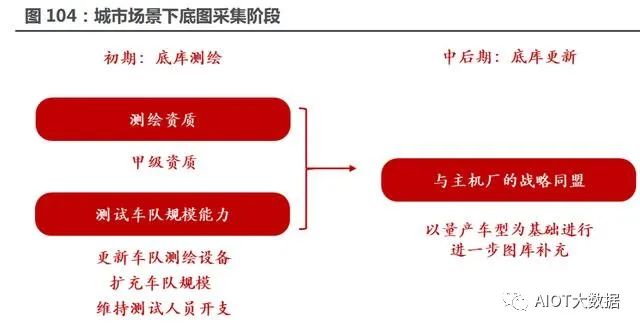
由此可以推导出,在该环节能够“突出重围”的供应商的第一个重要指标,即, 能够匹配到多大规模的主机厂,以及与主机厂的配合程度。目前在产业链中,如四 维图新已与奥迪、宝马、奔驰、大众、蔚来等多家主机厂,以及滴滴、搜狗等信息 服务商达成了深度合作,这些合作伙伴的所掌握的车辆将搭载新型车载传感器数 据的收集和处理平台,与公司共享相关的数据,形成完整的数据闭环;而高德也与 凯迪拉克和领克等也形成了战略同盟,这样的合作格局将使得他们的先发优势进 一步拉大,从而形成强大的“护城河”。
第二个重要指标在于图商产品与 V2X 车联网技术的关联程度,因为实时图层 更新采集环节更多体现出“车车交互”、“车路交互”的概念。类似于苹果 AirTag 通过其周围 iOS 设备的蓝牙进行感知定位的模式,路况共享数据的来源即是该场 景周围的行驶车辆,这些数据由行驶车辆采集,通过现代通讯技术上传至云端,再 共享给其他车辆的导航系统。这使得在车联网行业有提前布局的地图厂商具备了 极强的产业联动优势。其中,四维图新作为优先布局车联网的图商,目前已整体形 成了一个可视化的、定性的、描述性的“地图网络”,并具备了较强的技术沉淀。
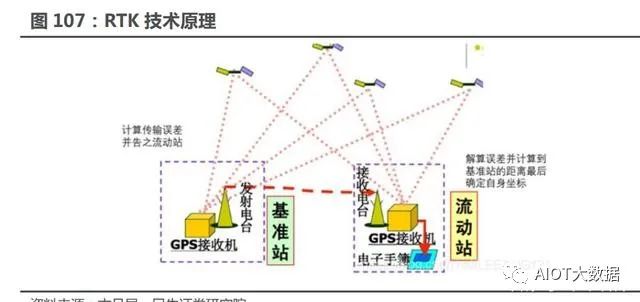
RTK 定位:是高精度地图信息质量的又一把“保护伞”。RTK 技术对于高精度 地图的核心作用在于,保证了车体实际位置与地图位置的一致性,从而保证了车身 传感器自我感知能够与地图既有信息进行相互补充。RTK 技术主要通过地基增强 站实现精确至厘米级别的定位。基准站首先将自己获得的载波相位观测值及站点 坐标,通过云平台实时发送给周围工作的动态用户。流动站数据处理模块使用动态 差分定位的方法确定流动站相对基准站的坐标,然后再由车端 GNSS 接收模块根 据基准站的坐标反算自身的瞬时坐标。因此作为 RTK 技术重要的支撑,能够使用 的地基站数量多少也将直接决定地图信息融合的质量高低,具备大量地基站使用 权限的图商将在地图尤其是实时图层的安全冗余方面更加游刃有余,形成较高的技术壁垒。国内 RTK 定位重要硬件支撑是我国自主研发的北斗地基增强系统,目 前由千寻位置、六分科技(四维图新旗下)等公司主要负责建设(存在资质+资金 壁垒)。截至 2022 年 1 月,千寻位置已在全国完成超 2800+座北斗地基增强站的 建设、六分科技也已完成组建 2600+CORS 参考站,其均拥有较强的壁垒性。
3.3 决策层:算力取代马力,构造智能汽车“基础脑”
3.3.1 自驾域芯片:算力的“军备竞赛”
自动驾驶芯片是运算任务的底层载体,其主控芯片正从 MCU 向 SoC 转移。正 如我们在上文“百年汽车产业的重塑”中所述,随着智能化程度的提升,使得原有 MCU 芯片难以满足汽车对于算力的需求,而随着汽车向集中式架构迭代,域控制 器成为汽车运算决策的中心,主控芯片作为运算能力的“底层载体”,不仅要做逻辑判断,还要处理并整合大量图片、视频、雷达等非结构化数据,因此,自动驾驶 主控芯片引入 DSP、GPU、NPU 等多个模块集成到一块 SoC 芯片上,使其不仅 拥有控制单元,还集成大量的计算单元,从而能够支撑多任务并发及海量数据的处 理,以实现自动驾驶的复杂功能。
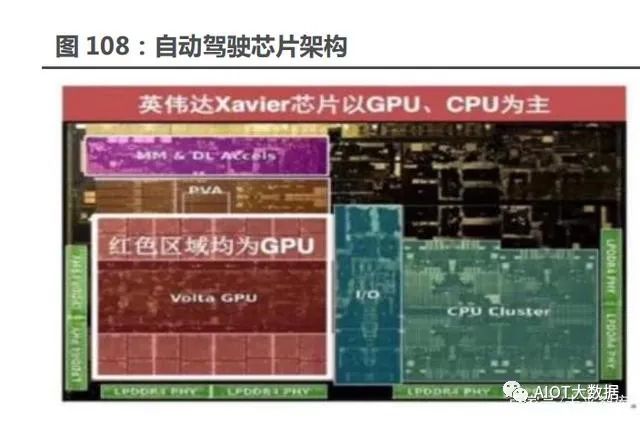
自动驾驶 SoC 芯片通常具有“CPU+XPUs”的多核架构,CPU 做逻辑运算、 整体统筹,XPU 用于大规模并行计算。结合前文的分析,单一的 CPU 模块难以满足自动驾驶大批量数据处理和部署 AI 算法的要求,其需要额外增加加速模块,以 提升算力、推动算法产生。因此,芯片厂商通常采用 CPU 作为逻辑、控制运算单 元,负责调度-管理-协调,再依据自身的定位选择加速单元如GPU/FPGA/ASIC等, 以实现大规模的并发运算。
而根据 XPU 选择的不同,又可以分为三种路线:1) CPU+GPU+ASIC:代表为英伟达、特斯拉、高通,其中英伟达 Xavier 以 GPU 为 计算核心,并包含两个 ASIC 模块 Deep Learning Accelerator(DLA)和 Programmable Vision Accelerator(PVA)用于特定的算法加速;而特斯拉 FSD 芯片则以两个 NPU(ASIC)为计算核心,一个轻量级 GPU 模块用于后处理;2) CPU+ASIC:代表为 Mobileye EyeQ5 系列、地平线征程系列,其中 Mobileye EyeQ5 主要有 4 个模块:CPU、CVP、DLA 和 MA,其中 CVP 是针对传统计算机视觉算法设计的 ASIC;而地平线自主设计研发了 AI 专用的 ASIC 芯片 Brain Processing Unit(BPU);3)CPU+FPGA:代表为 Waymo,其计算平台采用英 特尔 Xeon CPU,搭配 Altera 的 Arria 系列 FPGA。
高端路线:从“模式-能力”,英伟达优势显现
芯片厂商从 Tier2 向 Tier1 实现跃升。在高端路线下,主机厂为了掌握自动 驾驶的主动权,已不再满足于传统模式下 Tier1 的“黑盒形式”,其对于软硬件解 耦的需求也更为迫切,而具备自主研发能力的主机厂可跨过 Tier1 直接与芯片厂 商建立沟通渠道,以掌握在芯片选择、供应方面的主动权,并带动了芯片厂商由 Tier2 向 Tier1 实现跃升。
在高端路线的芯片选择上,由于该类型芯片通常具备全栈式方案,因此主机厂 会率先根据其自身能力在方案级中选择“开放/封闭”的模式。例如,Mobileye、 华为虽然能提供整体化方案,但其方案的开放性相对较弱,仅给予主机厂“黑箱式” 的输出。因此,自身软件及算法能力相对较弱的厂商会去选择与其进行合作(现 Mobileye 也逐步走向“开放”);而英伟达、高通等在提供整体化方案时相较于 Mobileye 等则更为“开放”,且允许定制化服务。因此,自身能力相对较强,或对 于主动权重视的主机厂则会偏向于选择英伟达、高通等厂商。
此外,根据我们产业链调研发现,单芯片的性能强度并不是主机厂考虑的唯一 要素,在除芯片性能外,性价比以及其在自动驾驶领域的软件生态及工具链的成熟 程度也是重要的参考。其中,在性价比方面:主要体现于“价格、传感器配置”:
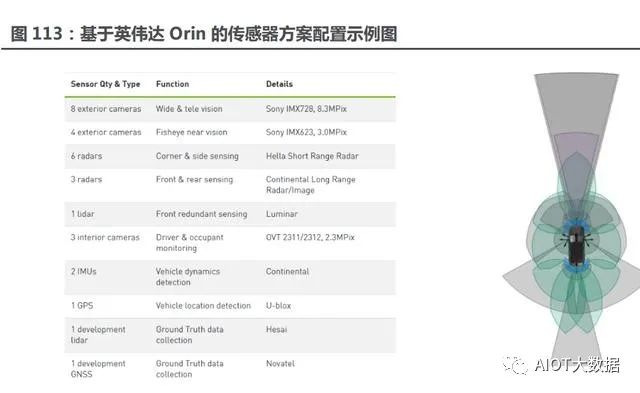
1)芯片价格:结合汽车之心和我们调研情况综合分析,英伟达 Orin 芯片的单颗 售价约在 400-500 美元左右,高通采用 Snapdragon 8540+9000 芯片的组合方 式,芯片整体售价约为 800-960 美元,差距并不明显,而 Mobileye 芯片的整体 价格相较英伟达、高通存在一定优势;但从另一指标来看(算力/价格),英伟达/ 高 通 /Mobileye (Orin/8540+9000/EyeQ5) 芯 片 的 相 关 指 标 分 别 达 到 0.64TOPS/$,0.95TOPS/$,0.52TOPS/$,相比之下,高通芯片在同等算力下价 格优势略微明显;2)传感器配置:结合前文中的分析,主机厂在感知层需配置多 种传感器,并以此作为自动驾驶方案的“差异化卖点”,而这对底层芯片则提出了 更高的要求,即需支持传感器的“多路输入”,并尽可能给予 OEM 在传感器配置 上的“高灵活度”。如,基于英伟达 Orin 芯片构建的自驾平台可以支持 12 个外部 摄像头、3 个内部摄像头、9 个雷达、12 个超声波雷达、1 个前置激光雷达,基本 涵盖大部分主机厂的传感器配置,整体性价比较高。
中低端路线:“交钥匙”方案为主,百家争鸣、各有所长
针对中低端方案,主机厂更偏向“交钥匙”方式,而芯片厂商百家争鸣、各有 所长。一些亟需量产的中低端车型,主机厂出于性价比、量产需求的考量,较难承 受高算力芯片的成本,因此偏向于选择“交钥匙”形式,以寻求 ADAS 功能的快 速应用。在中低端芯片中,按照是否提供解决方案进行分类,可大致分为两大类:1)包含提供芯片、操作系统、算法的完整的 ADAS 解决方案,如地平线、Mobileye、 黑芝麻等;2)仅提供单一芯片,如 TI、NXP、瑞萨等。其中,在方案级芯片厂商 中,根据是否可以做到“软硬件解耦”,分为开放型(如地平线、黑芝麻)和封闭 型(如 Mobileye),而在开放型的芯片阵营中,又各有特色,如地平线的优势在 于其向主机厂全面开放感知模块 API,并提供低级语义等中间结果,能够支持客户 在应用层开发复杂功能的需求,并且打造“天工开物”AI 芯片工具链,包括数据、 训练和设备部署工具,用于形成开发闭环。而黑芝麻先后自研 ISP 和 DyanmAI 处 理器 IP,以获得芯片更高的性能提升。
方案成熟度、芯片供应水平是主机厂的另一考量点,规模化量产能力以及快速 的芯片交付能力成为其站稳脚跟的关键。汽车产业对于风险厌恶程度明显,主机厂 更愿意选择拥有成熟落地项目、供应相对稳定的芯片厂商,以避免“失败”风险。而在此指标下,Mobileye、地平线等厂商具备较强的优势。其中,Mobileye 芯片 已应用于蔚来、小鹏、广汽、长城、上汽、一汽、宝马、本田等多家国内外主机厂。
3.3.2 自驾域控制器:决策层的“摆渡人”
域控制器作为集中式架构下的新产物,一出场即成为了决策层中当之无愧的 硬件核心。域控制器(DC)也叫域控制单元或多域控制器(Multi Domain Controller,MDC),最早由博世和大陆等 Tier1 所提出,旨在解决信息安全和 ECU 开发瓶颈问题,而自驾域控制器作为域集中架构下的新产物,通常以高算力芯片为 核心,包含 AI 芯片、CPU、MCU 等,其负责车辆在自动驾驶过程中大量传感器 数据的融合、处理任务,并基于此向汽车的动力单元下达指令,成为了汽车决策层 中的核心。
高端(自动驾驶方案)Tier1:无论是传感器配置、芯片或是车企的算法功能 需求,当前都存在一定的差异,并没有规范化的标准。因此,域控制器厂商需进行 定制化开发以迎合主机厂的“差异化”需求,其核心竞争力主要体现在:芯片的适 配能力、工程化能力以及本地化服务能力。
芯片的适配能力:芯片作为域控制器的核心差异化点,成为了主机厂对域控制 器选择的主要诱因,并形成了“选控制器”本质在于“选芯片”的底层逻辑。芯片 厂商作为域控制器厂商的核心技术支持者,为域控制器产品的差异化提供了最大 空间。相应地,域控制厂商作为芯片厂商生产能力的延伸,也为芯片厂商提供了充 足的市场基础和供应链能力。因此,这一供需关系推动形成了“芯片厂商为核心、 域控制器厂商作为必要补充”的供应链格局 ,技术的难点将由芯片厂商和域控制 器 Tier1 共同探索、相互赋能。而在这种格局下,作为壁垒性最强的一环,芯片厂 商对于主机厂来说,是技术架构的基石,其他功能的设计和生产均需满足与芯片的 适配性才能有效提高运行效率。因此,域控制器厂商背后的芯片厂商,将成为主机 厂供应链选择的重要选择维度。如,德赛西威与英伟达具备良好的合作关系,其 IPU03、IPU04 分别基于英伟达 Xavier、Orin 芯片开发。
软硬件工程化能力:在芯片向域控制器集成过程中,硬件生产存在散热难、功 耗高、可扩展等技术难点,而软件层上也需“搭载”丰富的中间件,这对域控制器 厂商综合的工程能力带来了考验。在硬件层面,随着芯片数量的增多、芯片算力要 求不断提高,自动驾驶域控制器面临着功耗过高、散热困难的问题。

综上,在现阶段,针对高端自驾解决方案:主机厂作为规则的制定者,出于差 异化需求,偏向于选择高算力芯片为后续 OTA 迭代铺垫算力冗余,而在该方案中, 其自身对于软硬件解耦的需求相对迫切,或将率先以“软件算法”为突破点,并逐 步向控制器设计延伸(前期选择控制器厂商进行“设计+代工”);针对中低端 ADAS 解决方案:在整体方案较为标准化的基础上,主机厂出于量产的考量,选择“交钥 匙”的策略,以打包方式采购整体化解决方案。但从长期来看,随着软硬件解耦的 深入,主机厂自身能力得到提升,无论哪一种方案,均大概率将以解耦为终局(或 部分主机厂因自身能力不足仍选择 Tier1 方案),而主机厂将彻底掌握“软件算法 -操作系统/中间件-域控制器设计”等关键环节,进而控制器 Tier1 也或将从”软硬 件设计”回归到”代工生产”的制造属性,而对其进阶要求也将转向于具备“适配多 款芯片”、软件能力(中间件 Middleware)、硬件工程化能力和后续的服务能力 上,以最终构建解耦下的平台化能力,达到“软件可复用,硬件可插拔”的标准。
3.3.3 自驾域软件:“操作系统、自驾算法”关键卡位
结合在“智能座舱:“第三空间”的底座“的分析,自动驾驶域也延续着类似的 软件架构。其中,在芯片算力的基础上,操作系统主要负责控制与管理软硬件资源, 进行着合理的调配;而算法层位于软件层次结构的最顶部,主要负责具体功能的实 现,在自驾域中为自动泊车、高速代驾、自动巡航等功能。但因两域底层定位不同, 操作系统、算法成为两域软件架构中差异化的存在,操作系统的核心要求从“生态 开放”转变为“安全/低延时”,算法也从“交互/应用”转变为“决策/规划/执行”。
操作系统:自驾域的“安心管家”
自动驾驶 OS 按照层级划分,可分为底层操作系统和顶层操作系统。其中,底 层操作系统:从内核到组件均全新打造的操作系统,如 QNX、Linux、实时操作系 统(RTOS)如 Vxworks 等;2)顶层操作系统:在基础型操作系统之上进行定制 化开发,如修改内核、硬件驱动、运行时环境及应用程序框架等。其中,典型的如 特斯拉 Version、大众 VW.OS 等。此种层级划分方式以内核是否全新构建为依据, 参照车机 OS 的规律,我们认为,在自动驾驶域中底层操作系统依旧把握内核,相 较顶层操作系统而言是真正的“价值核心”。

算法:竞相争抢的“技术高地”
算法对于自动驾驶而言至关重要。自动驾驶作为人工智能技术重要的应用场 景之一,其技术体系实现离不开算法的大规模部署,其有效性影响着自动驾驶的每 一个环节,从感知环节的特征提取到神经网络的决策,都需要依赖算法改进来提高 障碍物检测准确性和复杂场景下的决策能力,因此其成为各个主机厂、软件供应商 乃至芯片厂商竞相争抢的“技术高地”。
根据目前技术衍化阶段的不同,可以主要将自动驾驶域算法区分为 ADAS 算 法和自动驾驶算法。ADAS 算法主要应用于 L1-L2 的辅助驾驶阶段,其供应商多 为单一功能模块供应商,而自动驾驶算法作为 ADAS 算法的进阶,主要用于 L2+ 时代,将原 ADAS 算法中较多单一功能算法进行打包,以形成更全面的整体化方 案。

以 Momenta 为例,窥探算法供应商的成长性—并行战略突围,打造数据闭 环。Momenta 打造“并行战略”,即用于 L2 级辅助驾驶的 Mpilot 和 L4 级完全 无人驾驶 MSD。其中,Mpilot 主要为 ADAS 算法,用于搭载在量产车型之上, 通过主机厂前装,获得大量数据流;MSD 则主要面向高阶自动驾驶,并修改了原 有的“规则驱动(Human-Driven)”算法,向“数据驱动(Data-Driven)”的算 法转变。而其基于 L2 与 L4 产品并行的战略,打造了闭环的“自动化飞轮”,即通 过 Mpilot 获取的大量数据驱动 MSD 算法以“低成本”实现“高性能”迭代,再 由 MSD 再反馈给 Mpilot 领先的技术流,建立自动化发现、记录、标注、训练、 验证的闭环过程,为技术和产品提供自动化的迭代能力。而随着量产数据、数据驱 动的算法以及两者闭环自动化的积累和升级,飞轮也将不断推动其 Mpilot和 MSD 产品的性能优化,最终实现无人驾驶方案落地。
结合主机厂的研发进程,算法供应商在中短期具备前瞻性的卡位优势。结合上 文的分析,从中短期来看,主机厂自研进度难以追赶量产需求,偏向于撮合 Tier1 和算法厂商展开合作。此时,算法厂商在数据、技术储备上均具备前瞻性的先发优 势。其中,在数据层面:算法公司不仅拥有大量的前期路测数据,还可通过 ADAS 方案量产上车后的实现数据回传,如 Momenta 通过 Mpilot 产品每年可获取近百 万量订单,获取的数据可用于其算法的不断迭代;在技术储备层面:相较主机厂, 算法公司自身已具备卓越的“软”实力,算法框架相对完善,且拥有较多的人才储 备,如 Momenta 已实现了“数据驱动算法”,并构建了 L4 与 L2 的迭代飞轮。因 此,算法供应商或将凭借其先发优势率先迎来发展,但长期而言,数据将是自动驾 驶最终的“胜负手”,而主机厂自研趋势加剧叠加数据的“保密性”,致使算法厂商 难以再掌握关键信息,其竞争力或将面临下降。(报告来源:未来智库)
3.4 执行层:绝对服从的最后一环
执行层在根据决策层反馈的指令,代替人对车辆进行控制,其核心为车辆的纵 向控制和横向控制。智能汽车的执行层是在环境感知技术的基础之上,根据决策规 划出的目标轨迹,通过纵向和横向控制系统的配合,使汽车在行驶过程中能够实现 车速调节、车距保持、换道、超车、行驶等基本操作。其中,纵向控制包含车辆的 驱动控制和制动控制;横向控制包含方向盘角度的调整以及轮胎力的控制,而实现 “纵向+横向”自动控制,即可按给定目标和约束,自动控制车的运行。
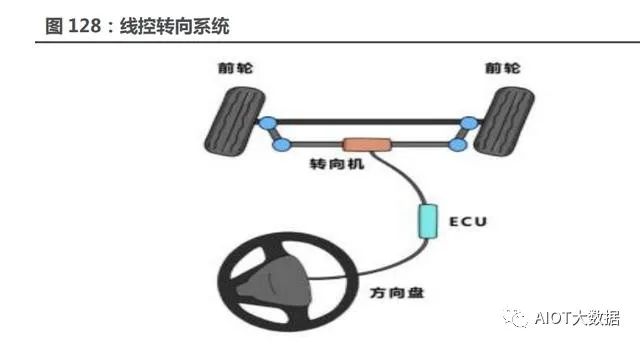
线控转向系统可实现自动驾驶过程中的电控自动转向。与传统转向系统不同, 线控转向系统取消了转向盘和执行器之间的机械连接,由电控系统实现转向,更方 便与其他子系统(如感知、动力、底盘等)实现集成,可有效改善汽车的安全性和 操纵性。
4 重点公司分析
4.1 四维图新:地图数据“国家队”,迎接公司历史性大拐 点
国内高精度地图领军企业。公司高精度地图助 C-V2X 大规模先导应用示范,成为 选用率最高的高精度地图技术方案。在工业和信息化部指导下,2020C-V2X“新 四跨”暨大规模先导应用示范活动在上海开展,四维图新作为高精度地图产品服务 提供商参与,在参与示范应用与公众试乘体验的全部 62 个编队车辆中,共有 45 个编队方案应用四维图新高精度地图产品,覆盖率超过 70%,成为选用率最高的 高精度地图技术方案。
持续推进“智能汽车大脑”战略,业务进展顺利。1)芯片:参股公司六分科技推 出厘米级、亚米级服务及高精度定位引擎产品,可覆盖全国 29 个省市自治区;2) 高精度定位:参股公司六分科技推出厘米级、亚米级服务及高精度定位引擎产品, 可覆盖全国 29 个省市自治区;3)高精度地图:公司积极拓展高精度地图在智慧 道路建设中的应用,开展大量先导性示范项目,包括联合承建工信部、发改委“2020 年产业技术基础公共服务平台-车联网先导应用环境构建及场景测试验证平台建 设项目”、“基于 5G 的车路协同车联网大规模验证与应用”,并与中国交建、中国 电信等合作伙伴一道,参与雄安新区绿色智能交通的先行示范区项目。

4.2 中科创达:全球领先的智能座舱软件解决方案提供商
智能座舱优势显现,尽享成长红利。根据高工智能汽车研究院的数据显示,2021 年 H1 国内新车(合资+自主品牌)搭载智能座舱上险量为 139.39 万辆,同比增 长 97.88%;新车智能座舱的搭载率达到 13.86%,同比增长 4.5pct,其中 L0/L1 功能已实现普及,L2/L3 功能也已进入了导入期。智能座舱是赋予传统汽车“智能 化”与“网联化”的关键,而对于其底层芯片的选择则会基于三点因素进行综合考 虑,包括芯片价格、算力与 5G Modern 技术。我们在此指标下判断,高通优势将 会愈发凸显,而公司在基于“高通+QNX”双 IP 下方案的成熟,一方面使其实现 了从外包商向方案商的跃升,另一方面则能借助该方案的优势,尽享行业成长红利。
智能驾驶能力互补,IP 加速丰富。根据汽车之家信息显示,2021 年 6 月 29 日长 城汽车正式发布咖啡智能 2.0,其智能驾驶第三代自动驾驶计算平台 ICU3.0 采用 高通 Snapdragon Ride 平台,算力支持 360T-1440T,2022 年 Q2 量产上车。此外,2020 年 6 月公司与滴滴合作开发的 DMS、ADAS 等智能安全驾驶方案正 式发布、2020 年 12 月公司收购自主泊车领域明星企业-辅易航 51.48%股权、 2021 年 3 月与华人运通成立合资公司布局汽车智能系统及软件开发,联手打造下 一代汽车计算平台和工具链。我们在深度报告中也重点分析过,在自动驾驶域中, 英伟达相较于高通的优势之一在于软件生态及工具链的成熟(理想汽车选择英伟 达的主要原因之一)。我们认为,随着公司在汽车计算平台及软件开发工具链的成 熟,其在拥有与高通多年深度合作的关系下,不仅能有效弥补高通在车载软件及工 具链上能力的缺失,同时公司也能借此机遇顺利切入自动驾驶领域,并有望实现现 有自动驾驶 IP 的全面输出。

4.3 道通科技:汽车后市场的全球智能诊断领导者
汽车智能诊断行业深耕多年,综合实力行业领先。公司成立于 2004 年,专注于汽 车智能诊断、检测分析系统及汽车电子零部件的研发、生产、销售和服务,产品主 销美国、德国、英国、澳大利亚等 50 多个国家和地区,同时公司也在北美、欧洲 等主要地区设立了海外分支机构。目前公司已构建了包括汽车综合诊断产品、针对 汽车胎压监测系统的 TPMS 系列和针对汽车智能辅助驾驶系统的 ADAS 系列在内 的三大产品线。同时基于多年积累的诊断维修数据与案例,开始提供一体化的智能 维修云服务。
公司所处汽车后市场与美国相比有巨大增长空间。根据 2019 年 IHS Markit 的最 新统计显示,美国汽车平均车龄高达 11.8 年,其中,乘用车的使用年限在过去两 年增加了 2.2%,SUV 增加了 0.4%。

