
热门标签
热门文章
- 1数据结构c语言大题答案,数据结构c语言版试题大全(含答案)
- 2[AHK] WinHttpRequest.5.1报错 0x80092004 找不到对象或属性
- 3Java实现音频转文本(语音识别)_java语音识别
- 4OpenCV 实战练习项目:深度学习与计算机视觉的融合实践
- 5movingpandas时空数据分析——旧金山出租车轨迹数据集处理
- 6win10防火墙删除的文件在哪里_不用删除文件!教你这样操作,Win10比win7运行更流畅!...
- 7FPGA基础设计(八):串口收发模块设计_fpga的串口模块
- 8【GEC6818开发板简介】
- 9VMware安装CentOS 8系统_centos8iso映像文件
- 10《Python股票量化交易从入门到实践》随书赠送“回测框架”的使用帮助_股票量化实践 网盘
当前位置: article > 正文
【PX4学习笔记】01.PX4硬件基础_px4的硬件连接图
作者:黑客灵魂 | 2024-07-19 05:24:53
赞
踩
px4的硬件连接图
目录
0.PX4相关的硬件模块

1.PIXHAWK硬件V2.4.8和V4
1.1 PIXHAWK V2.4.8硬件图
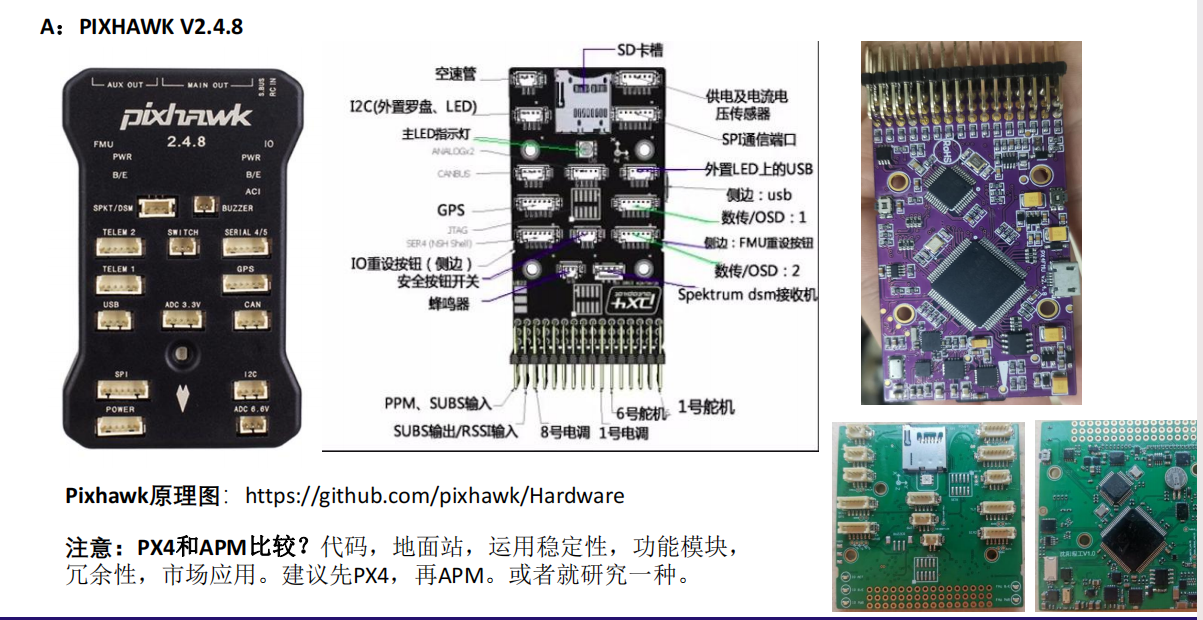
Buzzer蜂鸣器,有不同声音,代表不同的模式
GPS是最重要的模块,外场的定点模式主要依靠GPS模块
SD卡主要存储飞行数据等,相当于黑匣子
PX4与APM的区别如下:
1.代码不同,PX4更规范。2.飞控学习最好从PX4入手,框架,姿态解算与控制,commander等。3.APM飞控稳定性更高一些。4.APM的功能模块更稳定,PX4对ROS的支持更好。5.APM的冗余性更强
1.2 PIXHAWK V2.4.8 实际连接飞机的接线图
1、电流计正常才可在QGC校准电压
2、电调接口,负、正、信,电源5V
3、BB响连接电池,保护电池>=3.7V
4、在QGC设置定点模式,室外GPS数目达到要求,蜂鸣器会响 .
1.3 PIXHAWK V2.4.8实际连接飞机时的引脚定义

“负-正-信”。辅助通道(控制舵机那种)与主通道。V4版本的硬件不再有正负
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/黑客灵魂/article/detail/849628
推荐阅读
相关标签
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

