
热门标签
热门文章
- 1单片机UART一对多:同时读取多个传感器基于modbus协议_一个串口接多个设备
- 2程序员会被AI取代?程序员在AI时代如何华丽变身?_it行业会被ai取代
- 3python基础项目实践之学生通讯录管理系统2.0_python学生通讯录管理系统代码
- 4在两个java项目中实现Redis的发布订阅模式_跨系统 实现redis 发布订阅 java
- 5为啥程序会有bug?_代码为什么会有bug
- 6深入了解Web3:区块链技术如何改变我们的数字世界
- 7PyTorch 和 TensorFlow的区别_pytorch和tensorflow的区别是什么?
- 8基于PHP学籍管理系统设计与实现
- 9MQ——RabbitMQ网络分区原理_rabbitmq pause_minority
- 10【2023】COMAP美赛数模中的大型语言模型LLM和生成式人工智能工具的使用_comap人工智能使用政策
当前位置: article > 正文
Livox激光雷达 mid360 跑 fastlio2 - 流程记录_livoxjiguangleida mid360 pao fastlio2 -
作者:从前慢现在也慢 | 2024-04-13 08:25:39
赞
踩
livoxjiguangleida mid360 pao fastlio2 -
提示一下,如果在一些板上(比如rk3399,或者是树莓派 ,nano之类的)一直编译不了 ros程序,很多时候是因为 swap 不足,这个时候扩展一下 swap 就好了 扩展 swap 参考链接
一、配置 mid360 环境
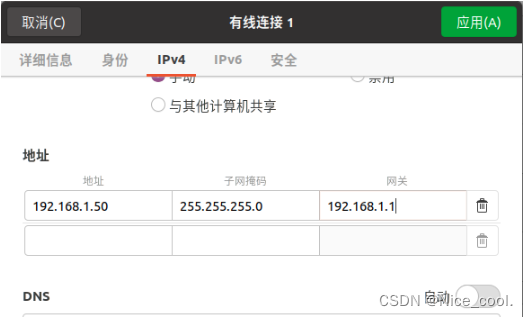
1.1、主机配置静态IP为192.168.1.50
1.2、Livox-SDK2
安装工具
sudo apt install cmake
- 1
下载源码编译
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd Livox-SDK2
cd build && cmake ..
make
sudo make install
- 1
- 2
- 3
- 4
- 5
查看是否安装成功,需要修改Livox-SDK2/samples/livox_lidar_quick_start/mid360_config.json中:"host_ip" : "192.168.1.50",
打开终端
cd Livox-SDK2/build/samples/livox_lidar_quick_start
./livox_lidar_quick_start ../../../samples/livox_lidar_quick_start/mid360_config.json
- 1
- 2
1.3、Livox_ros_driver2
下载源码编译
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
cd ws_livox/src/livox_ros_driver2
# For ros1
./build.sh ROS1
# For ros2
./build.sh ROS2
- 1
- 2
- 3
- 4
- 5
- 6
cd ws_livox
source install/setup.sh
- 1
- 2
进入 ws_livox/src/livox_ros_driver2/config目录下,找到 MID360_config.json 修改 lidar ip
比如我的ip是 "ip" : "192.168.66.188",其中88是我的 SN 码后两位

二、Fast-lio2
2.1、下载源码
创建工作空间 fast_lio2_ws ,把 fast-lio2源码放在 工作空间的 src 下
下载 fast-lio2 源码
cd ~/$A_ROS_DIR$/src
git clone https://github.com/hku-mars/FAST_LIO.git
- 1
- 2
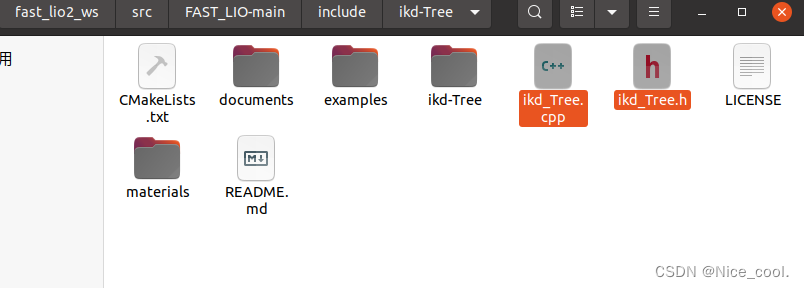
下载 ikdtree 源码 在 xx/FAST_LIO-main/include/ikd-Tree/下
git clone git@github.com:hku-mars/ikd-Tree.git
- 1
2.2、修改代码
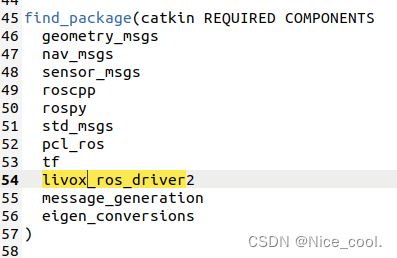
主要是把 livox_ros_driver 改成 livox_ros_driver2
1、fast_lio2_ws/src/FAST_LIO-main 下的 CMakeLists.txt
2、laserMapping.cpp
3、preprocess.cpp、preprocess.h
2.3、编译、运行
catkin_make
- 1
source devel/setup.bash
- 1
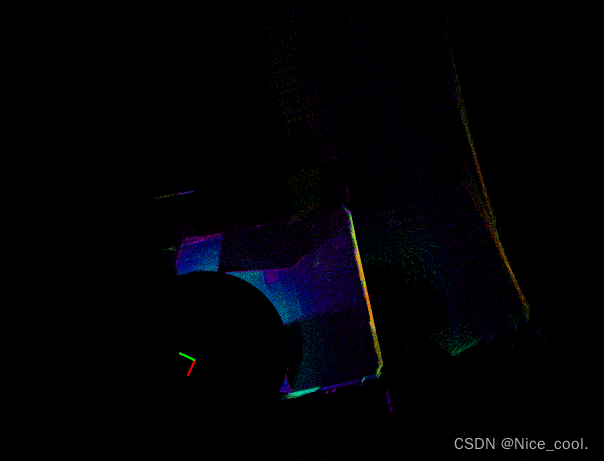
roslaunch fast_lio mapping_avia.launch
roslaunch livox_ros_driver2 msg_MID360.launch
- 1
- 2
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

