
- 1IDEA 闪退,并在C盘生成文件java_error_in_idea_****.log_java_error_in_idea.log
- 246-Golang中的Redis_golang redis
- 3【短学期】菜谱类数据库设计-ER图设计_菜谱小程序er图
- 4设计模式之状态模式(下)
- 5C语言趣味小游戏——三子棋的实现过程详解_c语言味趣小游戏闯关
- 6FPGA时序分析与约束(4)——时序分析,时序约束,时序收敛_时序约束和时序收敛
- 7鸿蒙os开源知乎,【转帖】知乎管理华为鸿蒙OS的介绍2
- 8【蓝桥杯国赛真题01】python三角形 青少年组蓝桥杯python 国赛真题解析_蓝桥杯青少年python
- 9【Node.js】如何修复“错误:错误:0308010c:digital envelope routines::不受支持”_error:0308010c:digital envelope routines::unsuppor
- 10kubernetes的DevOps业务(七):Jenkins,GitLab,Harbor,Tekton,GitOps_jenkins + argocd + istio
可开发UAV-2_mission planner 1.3.62
赞
踩
可开发UAV-2
Ardupilot飞行模式注解
1、定高模式(ALTHOLD)
气压计测量的气压值计算保持目前高度的稳定模式
油门死区,油门动作幅度超过这个死区时,飞行器才会响应你的升降动作
任何带有自动高度控制的模式时,你目前的油门将被用来作为调整油门保持高度的基准。在进入高度保持前确保你悬停在一个稳定的高度。飞行器将随着时间补偿不良的数值
定高模式切换到其他模式,一定要在油门摇杆处于50%的位置进行切换!否则飞机会急速上升或则下降,容易造成操作失误。
2、悬停模式(Loiter)
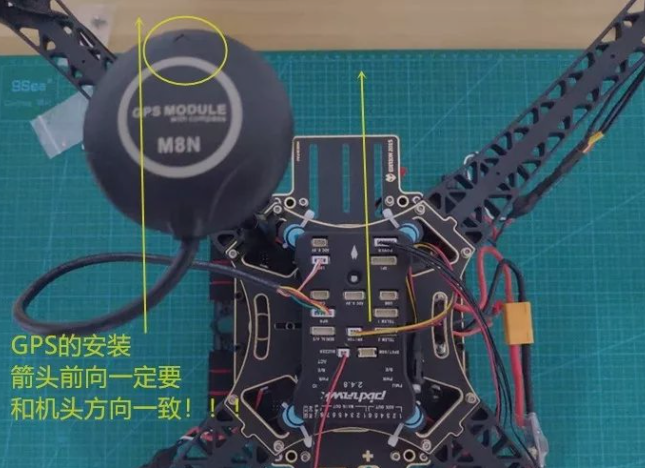
悬停模式是通过GPS定点+气压计定高的综合模式
起飞前先让GPS定位(也就是在室外空旷处,飞控LED指示灯变成绿色),这样飞行器才能正常使用悬停模式。
油门超过50%,飞机就会离地起飞。起飞后大于3米的任意高度,只要油门摇杆回到50%的位置,飞机就会悬停在空中。油门摇杆高于50%,飞机就会缓慢升高,油门低于50%,飞机会缓慢下降。适合航拍等需要稳定飞行的情况。悬停模式下,操作者也可以通过遥控器控制前后左右上下等方向。
3、返航模式(RTL)
油门超过50%,飞机就会离地起飞。起飞后大于3米的任意高度,只要油门摇杆回到50%的位置,飞机就会悬停在空中。油门摇杆高于50%,飞机就会缓慢升高,油门低于50%,飞机会缓慢下降。适合航拍等需要稳定飞行的情况。悬停模式下,操作者也可以通过遥控器控制前后左右上下等方向。
GPS如果在起飞前没有定位,飞行器就无法知道家的位置,返航模式就不能正常进行
4、降落模式(Land)
操作飞行器进入降落模式,飞行器会在当前位置,自动降落并上锁,不需要人工干预。
5、绕圈模式(Circle)
当切入绕圈模式时,飞行器会以当前位置为圆心,自动绕圈飞行。而且此时机头会不受遥控器方向舵的控制,始终指向圆心。
圆的半径可以通过高级参数设置调整。
果遥控器给出横滚和俯仰方向上的指令,将会移动圆心。
6、自稳模式(Stabilize)
自稳模式是使用得最多的飞行模式,也是最基本的飞行模式。自稳模式不会依靠气压计定高和GPS定点。因此自稳模式下飞行器不会自动定高、定点,需要操作者随时调整油门大小和方向,才能保持飞机在空中的姿态。
起飞和降落都应该使用此模式。自稳模式也是最安全的模式。但是因为新手往往对油门控制不好,对方向控制也不熟悉,所以感觉自稳模式不好飞行。不过初学者一定要经常练习此模式,达到熟练的程度。一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。
7、简单模式(Simple Mode)
简单模式相当于无头模式。启用简单模式后,飞机将解锁起飞前的机头指向恒定作为遥控器前行摇杆的指向,这种模式下无需担心飞行器的姿态,新手非常有用
其他飞行模式:
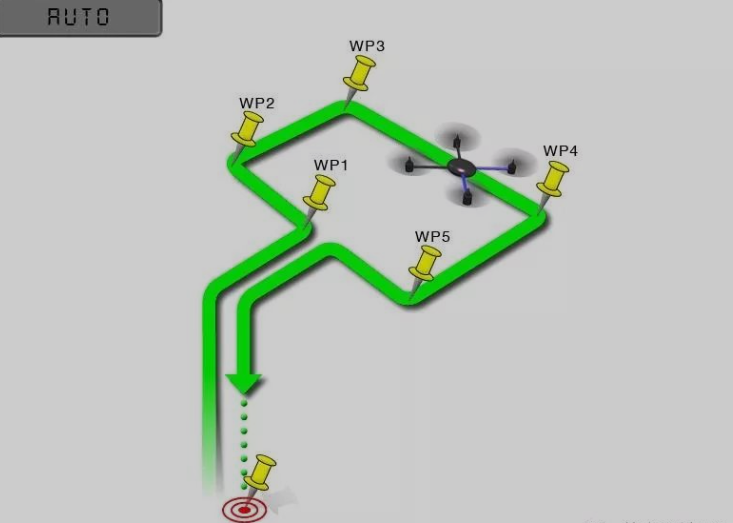
1、自动模式(AUTO)
自动模式需要配合地面站软件。一般室外飞行需要搭配数传模块才能进行。飞行器将按照预先设置的任务规划控制它的飞行。
切换到自动模式有两种情况:
如果使用自动模式从地面起飞,飞行器有一个安全机制防止你误拨到自动模式时误启动发生危险,所以需要先手动解锁并手动推油门起飞。
飞后飞行器会参考你最近一次ALTHold定高的油门值作为油门基准,当爬升到任务规划的第一个目标高度后,开始执行任务规划飞向目标;
航线设置视频链接:http://v.youku.com/v_show/id_XMzg1ODkwODkzMg==.html?x&sharefrom=android&sharekey=da853892d96d95df5093196de0ceddac7
2、引导模式(Guided)
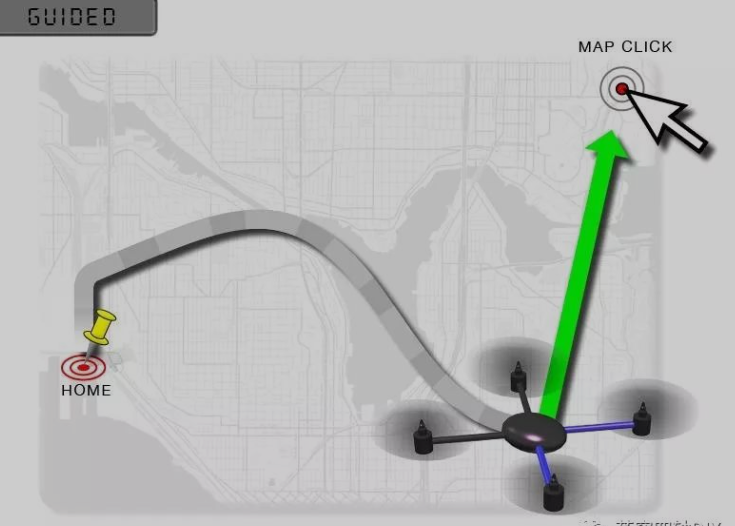
3、跟随模式FollowMe
因为手机上有GPS定位,此GPS会将位置信息通过地面站和数传电台随时发给飞行器,飞行器实际执行的是“飞到这里”的指令。其结果就是飞行器跟随操作者移动。
Missionplanner调试
\1. Missionplanner地面站调试软件(版本:1.3.62)下载链接:
https://pan.baidu.com/s/1amOR1VK1cu-5uEJmcQGQ3w
这款软件是免安装版本,下载后解压。打开文件夹以后,找到 missionplanner.exe 文件,双击启动即可。
\2. Mission Planner 的安装运行需要微软的 Net Framework 4.0 组件,当系统缺少Framework4.0插件时,有可能会无法运行。请点击下面的链接下载framework4.0安装后再启动missionplanner调试软件:
https://pan.baidu.com/s/1IW-gAIXfRl02TqF5CnWxpQ
飞机方向
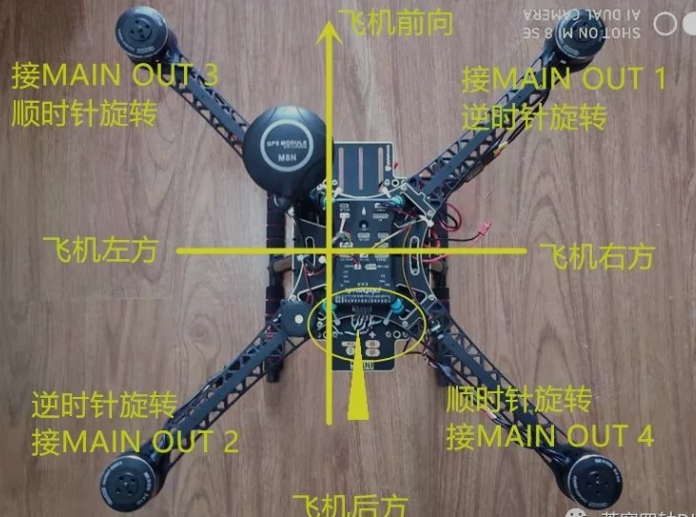
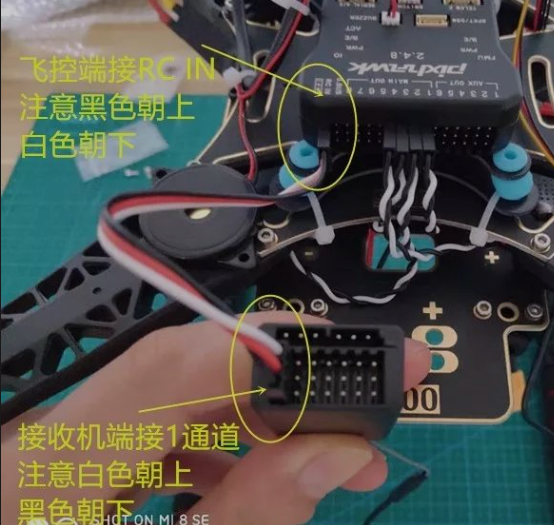
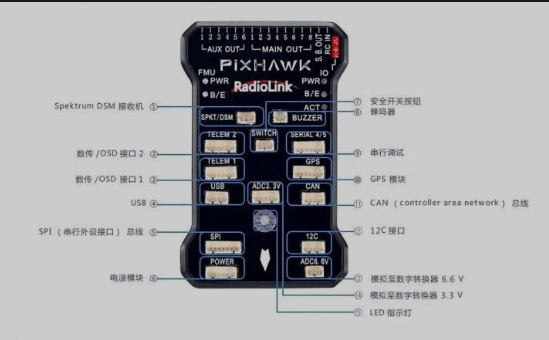
飞控
以上基本包含了所有的组件描述,下篇开始测试

