- 1电话营销机器人具体是怎么运行的呢?_freeswitch 营销机器人模块
- 2AI实战 | AI算法能不能协助英语老师出一份nb的考卷?
- 3AI工具 Github项目_ai推文工具 github
- 4verilog基础篇--常用的信号生成模块_verilog产生脉冲信号
- 5计算机二级选择题复习整理(公共基础部分)_计算机等级 软件工程基础 选择题
- 6IntelliJ IDEA下git版本回退,版本还原_checkout tag or revision
- 7数据结构与算法——排序算法_冒泡排序的堆栈
- 8mysql+ php_php+mysql
- 9大模型中常用的分词器Tokenizer学习总结记录与代码实现_大模型分词器
- 10Git clone/pull/push需要输入密码解决方法(全网最靠谱版本)_git clone git@ 密码
改进的IAYOLO---GDIP:Gated Differentiable Image Processing for Object-Detection inAdverse Conditions_gdip: gated differentiable image processing for ob
赞
踩
论文地址:https://arxiv.org/abs/2209.14922
代码地址:https://github.com/Gatedip/GDIP-Yolo
motivation:
(1)现有的目标检测器只能在图像质量很好的情况下才能很好地工作,但是如果想要把目标检测器应用于自动驾驶或者是辅助驾驶,其实更有用的是其能够在实际条件下做检测。
(2)IAYOLO在众多恶劣天气的目标检测器的脱颖而出,但是IAYOLO的过滤器是以一定的顺序对图像进行处理然后进行检测,作者在文中提到这会影响IAYOLO的性能。
创新点:
(1)提出了一种gating mechanism(门控机制),可以使得多个可微图像处理模块concurrent relative weighting(并发相对加权),增强在不同条件下的目标检测。
(2)多尺度的MGDIP。
(3)讲GDIP作为YOLO v3的一个正则化器,直接使YOLO v3针对恶劣天气进行训练,在推理过程中可以删除GDIP。
提出的方法:
(1)GDIP:
和IAYOLO类似,都是采用一些Image Processing(图像处理IP)操作,但是GDIP中的IP并发执行,并且加权组合。

如图所示,每一个Gb的输入都是来自一个Vison Encoder(CNN网络:包含5个卷积层,每个卷积层后是平均池化,最后一层后是全局平均池化,得到的维度是1*1*1024;再经过一个全连接层降维至256);其中每一个Gb都包含
一个线性层;
一个可微图像处理模块IP,所有IP的输出都会乘以门的标量作为Gb的输出;
一个gate(门:这个gate使用tanh函数返回的是0-1之间的一个值。),
一个归一化操作。
最终对所有的Gb的输出聚合,进而得到想要的增强的图像。公式表达如下:(z是增强后的图像;f![]() 表示IP图像处理操作;
表示IP图像处理操作;![]() 表示gate输出的标量;N为归一化操作)
表示gate输出的标量;N为归一化操作)

(2)MGDIP:
由于上述的GDIP只使用vision encoder的最后一层,这限制了GDIP可使用参数的范围,所以进一步改进如图:
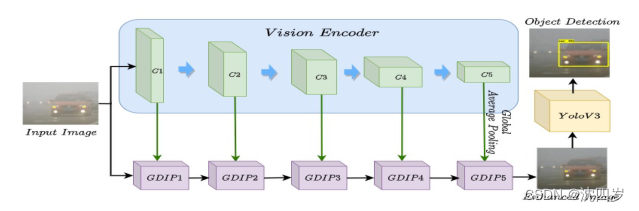 MGDIP通过将一个GDIP块的输出作为下一个GDIP块的输入逐步增强图像,其中各个GDIP块由vision encoder不同层提取的特征引导。MGDIP的最终增强输出被传递给Yolo进行目标检测。
MGDIP通过将一个GDIP块的输出作为下一个GDIP块的输入逐步增强图像,其中各个GDIP块由vision encoder不同层提取的特征引导。MGDIP的最终增强输出被传递给Yolo进行目标检测。
(3)GDIP作为一个正则器:
如图所示:增强的图像并作为YOLO的输入而是训练正则化得到的副产品。并且这里的GDIP仅仅是为了完善YOLO,让它能够更好的学习的特征,所以它只有在训练的时候才会用到。
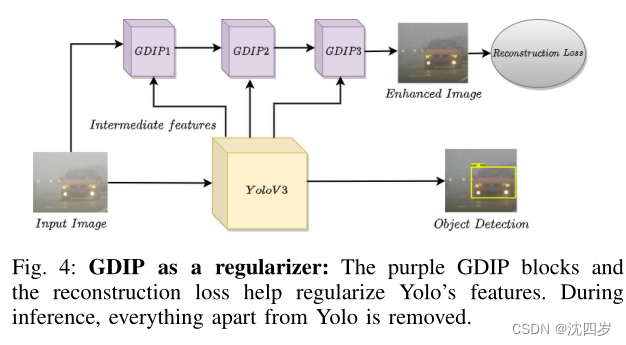
将GDIP作为正则化器重新定义的损失函数为:LReg![]() 为重构损失,计算清晰图像和输入图像的L1范数和均方误差损失的组合。
为重构损失,计算清晰图像和输入图像的L1范数和均方误差损失的组合。
![]()
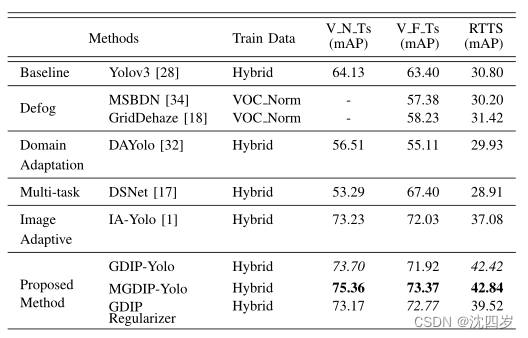
效果:

其中一个消融实验:
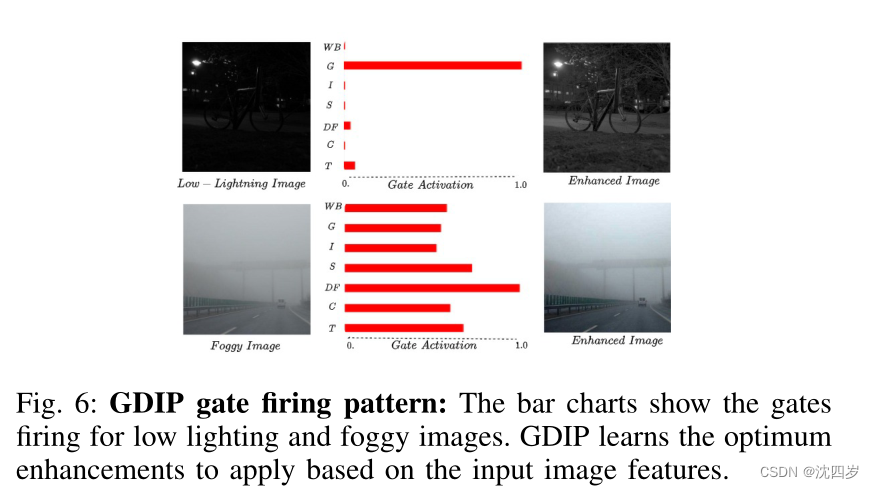
在论文有一个gate,前面说它是经过tanh函数输出对应于[0,1]的标量![]() ,这里作者论文里做了一个消融实验,来证明gate的必要性。没有了
,这里作者论文里做了一个消融实验,来证明gate的必要性。没有了![]() 对应于数据集RTTS(有雾)和ExDark(低光照)的mAP分别下降了0.77和0.27。作者在这里给了一张图:在图里可以看到对于低光照,对应的gamma gate的激活值最高;对于有雾的图,DF(除雾)是最高的。增强了GDIP的可解释性。
对应于数据集RTTS(有雾)和ExDark(低光照)的mAP分别下降了0.77和0.27。作者在这里给了一张图:在图里可以看到对于低光照,对应的gamma gate的激活值最高;对于有雾的图,DF(除雾)是最高的。增强了GDIP的可解释性。