
热门标签
热门文章
- 1基于n-gram模型的中文分词_ngram分词
- 2java连接mysql增删改查(01单增删改查)_java连接mysq 增删改查
- 3论文aigc检测率为多少合格?论文ai免费润色_本科毕业论文aigc值多少合格
- 4Python中数据可视化的最新趋势和未来发展
- 5不相交集(The Disjoint Set ADT)_the array representation of a disjoint set contain
- 6Solana 与 DePIN 的双向奔赴,会带来 DePIN 之夏吗?
- 7matlab实现apriori算法源代码实验报告_apriori算法实验报告
- 8计算机毕业设计hadoop+spark知识图谱视频推荐系统 视频分析可视化大屏 视频爬虫 视频大数据分析 大数据毕业设计 机器学习 深度学习 人工智能
- 9对云原生整体解决方案的进一步复盘
- 10Java进阶-SpringCloud设计模式-工厂模式的设计与详解
当前位置: article > 正文
ROS2+mid360建图教程(1)
作者:AllinToyou | 2024-05-14 10:26:22
赞
踩
ROS2+mid360建图教程(1)
1. 前言
最近比赛中进展到需要使用mid360建图,为小车的导航提供二维的地图,本文章主要分享mid360的使用教程,以及ros2中将3维图转化为二维图,并且分享在使用过程中遇到的相关问题,希望对大家有所帮助!
2.mid360的使用教程
2.1 系统环境配置
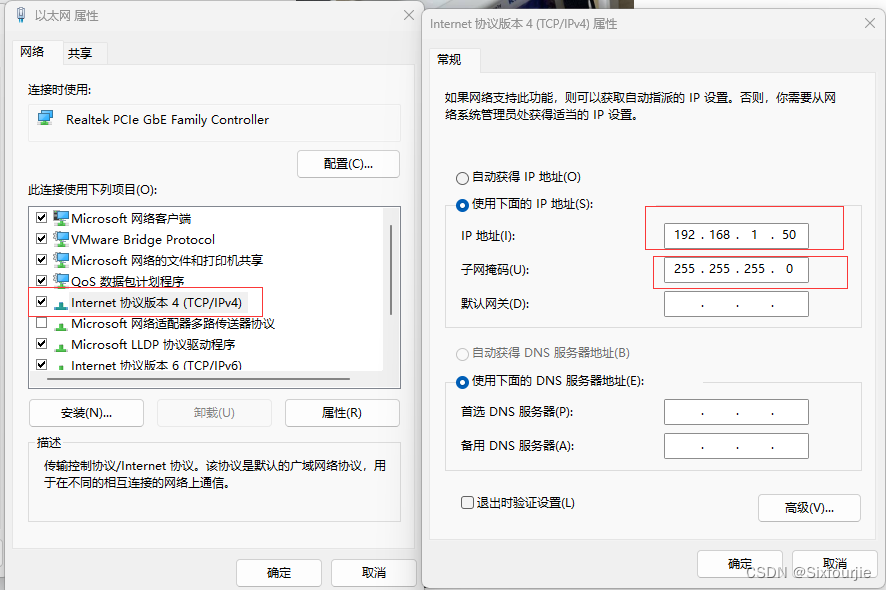
首先把你的mid360按照说明书要求,连接好网络端口和电源,随后连接上以太网。

第一步进入Windows的控制面板——网络和共享中心——以太网,按照以下步骤进行配置,将你的电脑ip地址更改为192.168.1.50,保存退出。

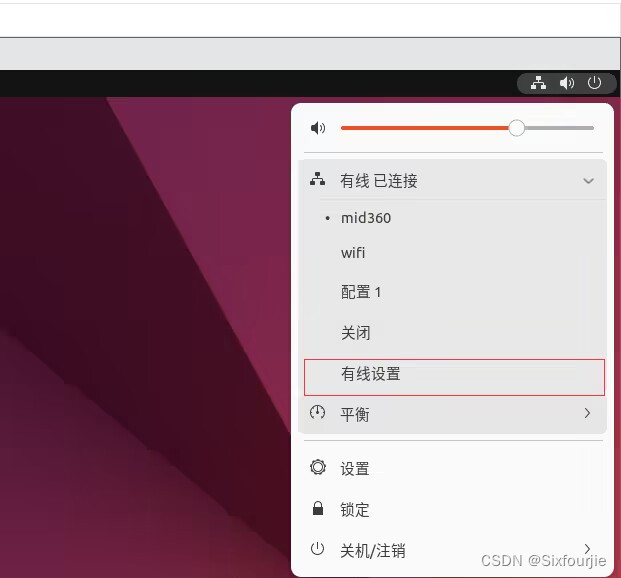
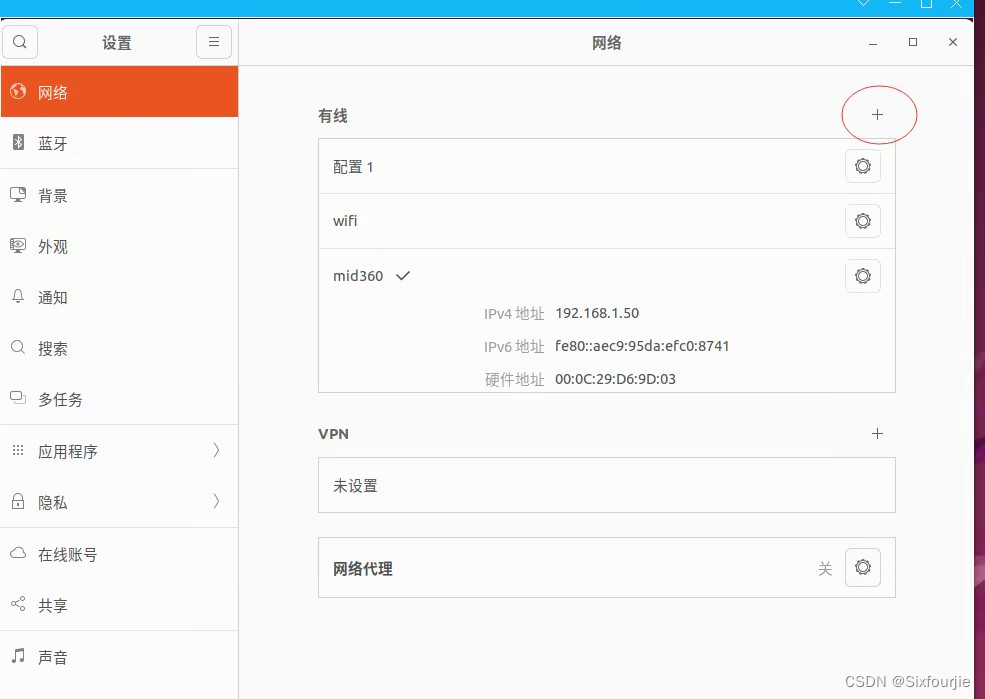
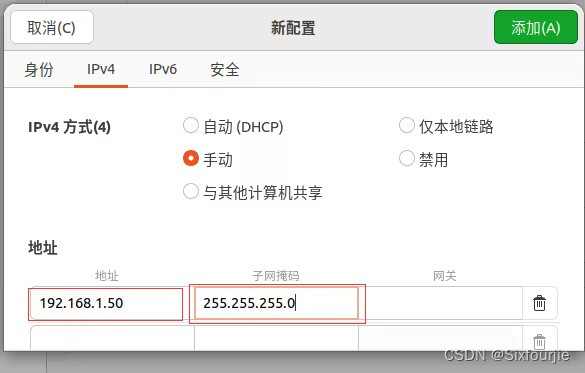
第二步进入ubuntu系统中,完成以下步骤:
(网络配置名称作者这里是mid360,可以随意填写用于区分作用(如图2))
注意!!!!!,在你使用mid360雷达的时候,建议关闭你的电脑wifi,(主要是不能连上任何的wifi,作者经常自动连接到校园网,因此浪费过很多时间),并且你的Ubuntu系统要更改成桥接模式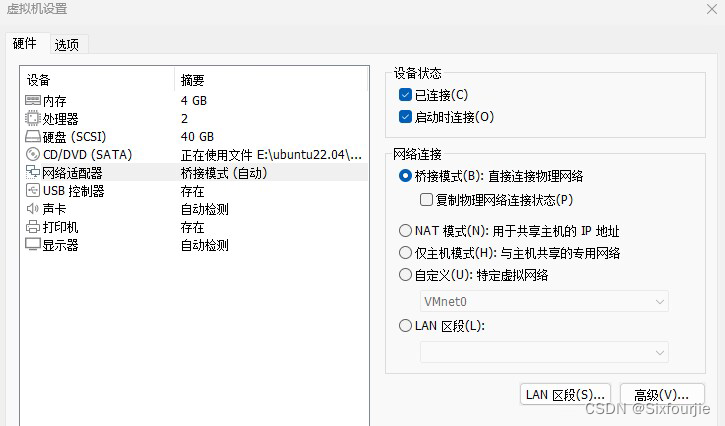
2.2驱动准备
- 首先需要在你的系统中安装Livox-SDK2
官方地址:https://github.com/Livox-SDK/Livox-SDK2
随后执行相关命令:
- git clone https://github.com/Livox-SDK/Livox-SDK2.git
- cd ./Livox-SDK2/
- mkdir build
- cd build
- cmake .. && make
- sudo make install
- 其次编译livox_ros_driver2
官方地址:https://github.com/Livox-SDK/livox_ros_driver2
相关的详细教程可参考【此博客】。
2.3修改config文件
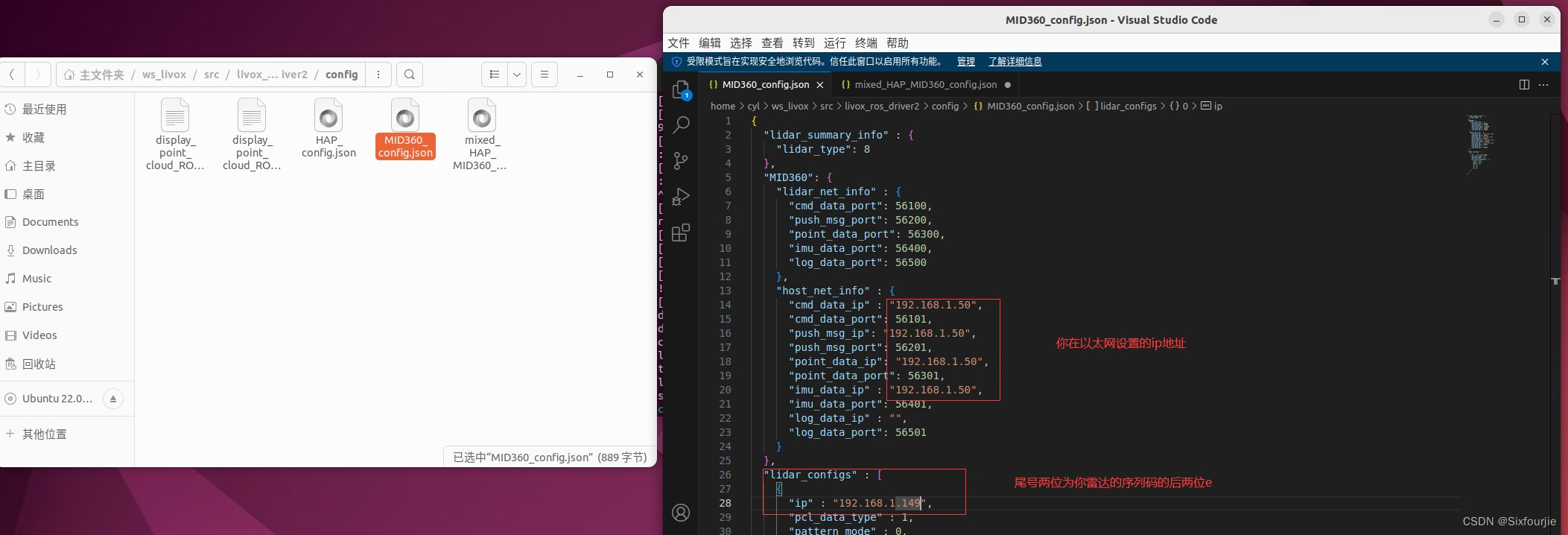
3.运行指令
终端进入到/src/livox_ros_driver2目录下,执行如下命令:
- source /opt/ros/humble/setup.sh
- ./build.sh humble
运行launch文件
ros2 launch livox_ros_driver2 rviz_MID360_launch.py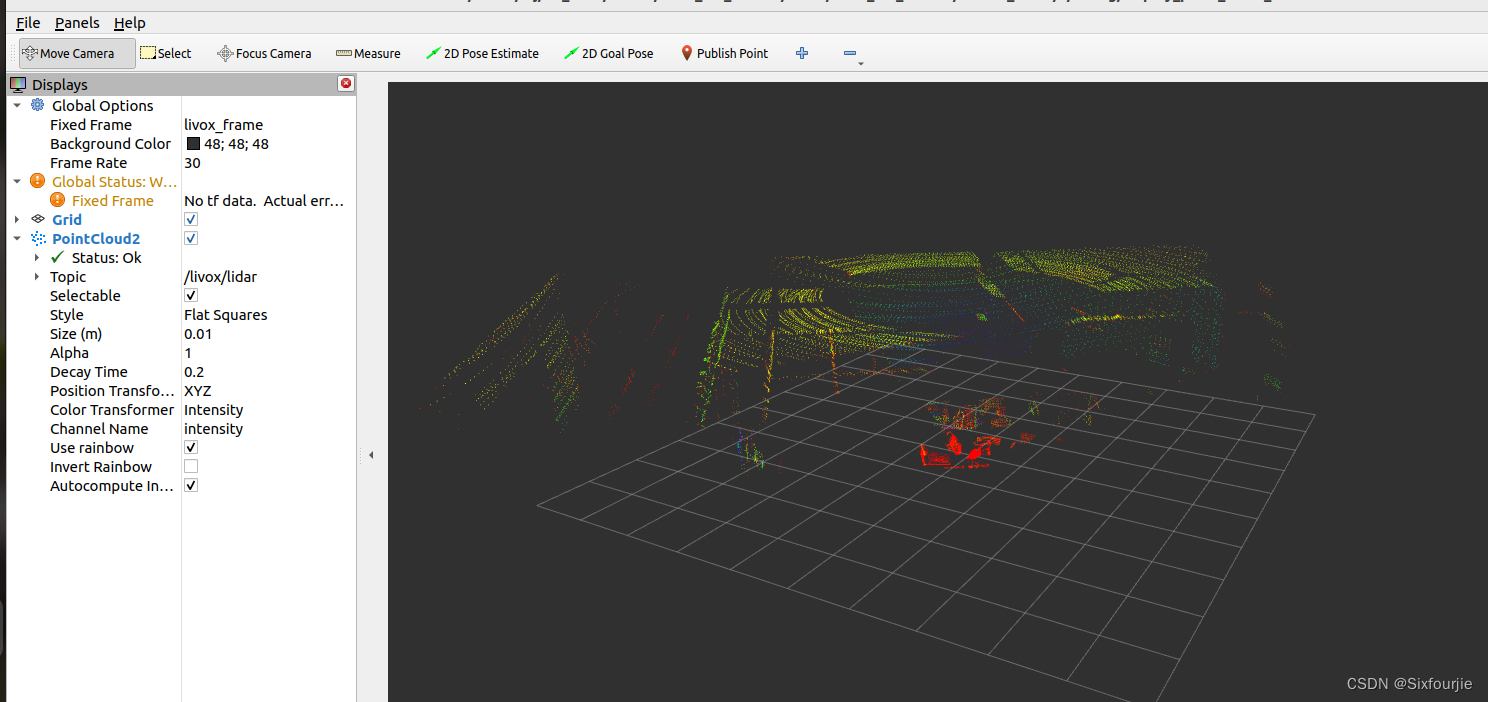
这样就完成了使用mid360建图的第一步!
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/568381
推荐阅读
相关标签

