
基于CoppeliaSim和KUKA youBot的移动机械臂抓取仿真(二): coppeliasim安装和操作界面介绍_coppeliasim组装机械臂
赞
踩
用钢铁意志,成就不平凡人生。
上期我们学习了CoppeliaSim和KUKA youBot仿真平台介绍https://mp.csdn.net/mp_blog/creation/editor/131430646
这期我们学习coppeliasim安装和操作界面介绍
2.1coppeliasim安装
要安装CoppeliaSim仿真软件,您可以按照以下步骤进行操作:
1. 访问CoppeliaSim Robotics的官方网站 (https://www.coppeliarobotics.com/)。
2. 在主页上,点击 "Download" 或 "下载" 按钮。我们一般使用CoppeliaSim的教育免费版(EDU版)进行学习
3. 在下载页面上,选择适合您操作系统的版本。CoppeliaSim支持Windows、Mac和Linux操作系统。
4. 下载完成后,根据您的操作系统,双击安装程序以开始安装过程。

5. 跟随安装程序的指示,选择安装目录和其他选项。您可以使用默认设置或根据需要进行自定义配置。
6. 完成安装后,您应该能够在计算机上找到CoppeliaSim的图标或启动器。
7. 双击图标或启动器,打开CoppeliaSim软件。
现在,您已经成功地安装了CoppeliaSim仿真软件。您可以开始使用它进行机器人仿真和开发。如果您遇到任何问题,可以参考CoppeliaSim Robotics的官方文档或寻求他们的技术支持。
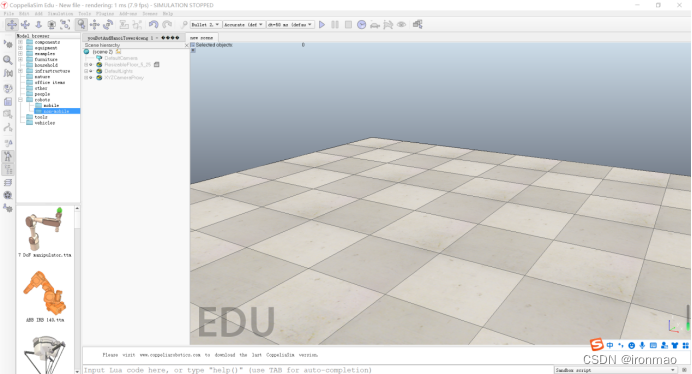
2.2coppeliasim操作界面介绍
CoppeliaSim的操作界面由多个主要组件组成,下面是对每个组件的简要介绍:
1.菜单栏:位于窗口的顶部,包含各种菜单和选项,用于访问软件的各种功能和设置。

2.工具栏:位于菜单栏下方,提供了一些常用工具按钮,如打开、保存、运行仿真等。您可以通过单击这些按钮来快速访问相应的功能。包括视图转换、视图放大缩小、机器人模型的平移、旋转等,还包括物理引擎的选择、仿真程序的启动、暂停和加减速等基本功能;
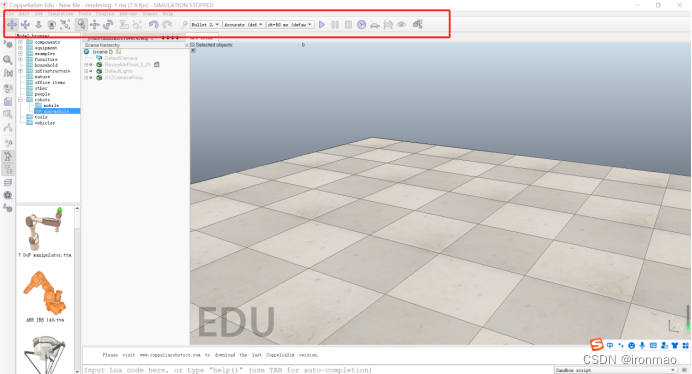
图2.4 工具栏
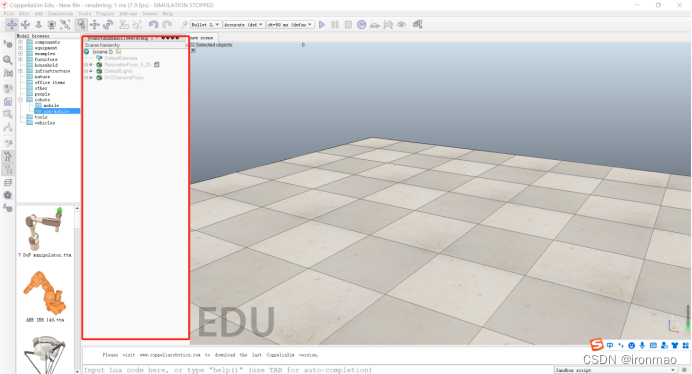
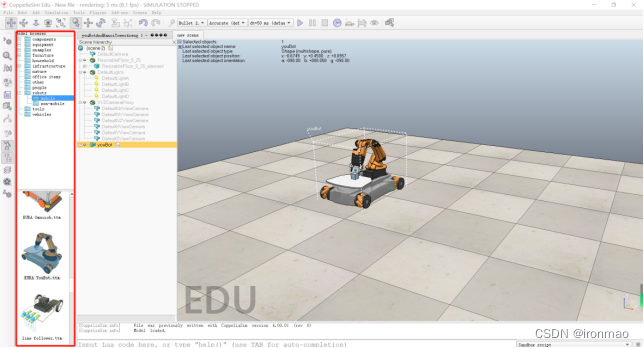
3.场景层次结构:位于左侧,默认显示为一个面板,显示了场景中的所有对象及其层次结构。您可以在此面板中选择和管理场景中的各个元素,例如机器人模型、传感器、物体等。
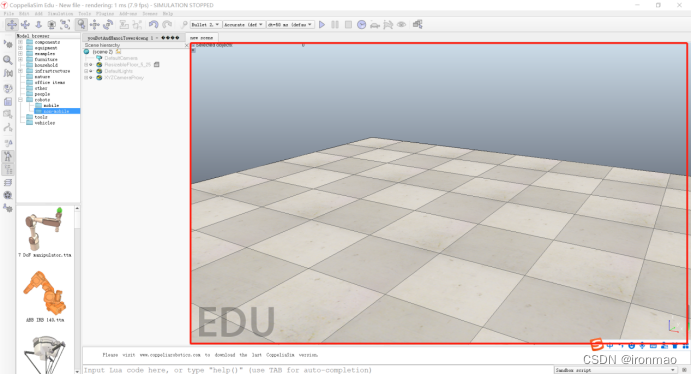
4. 3D视图窗口:位于中间,默认显示为一个或多个窗口,用于呈现场景的三维模拟效果。您可以在其中观察机器人的动作、物体的碰撞等。
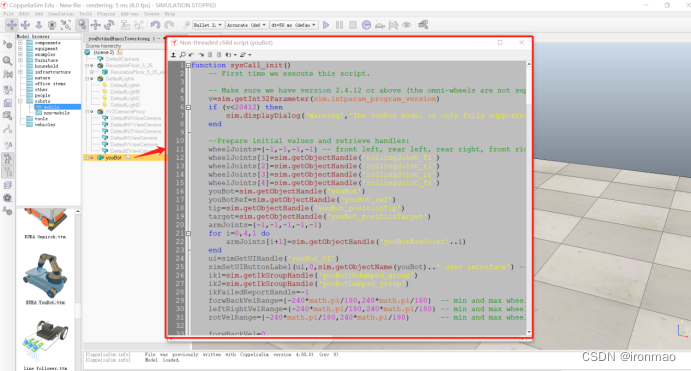
5. 脚本编辑器:位于底部,默认显示为一个面板,用于编写和编辑Lua脚本。您可以使用脚本来控制机器人的动作、实现自定义逻辑等。
6. 状态栏:位于窗口的底部,显示了有关当前仿真状态的信息,如仿真时间、物体数量等。

通过这些组件,您可以在CoppeliaSim中创建、编辑和运行机器人仿真场景,并进行各种设置和作。请注意,CoppeliaSim的界面可能因版本而有所不同,但基本的布局和功能是类似的。
以下是CoppeliaSim的一些基础操作指南:
1. 创建场景:打开CoppeliaSim后,单击菜单栏中的 "File"(文件),然后选择 "New Scene"(新建场景)。这将创建一个空的场景。

2.添加对象:在场景层次结构面板中,您可以选择机器人模型、传感器、物体等。拖动所选对象到3D视图窗口中,放置到适当位置。
3.编辑对象属性:在属性编辑器中,选中场景层次结构面板中的对象,在属性编辑器中可以更改对象的属性,如位置、尺寸、质量等。例如,您可以更改机器人的关节角度或设置物体的碰撞属性。
- Canvas绘制3D烟花动画特效html代码[详细] -->
赞
踩

