
- 1mysql主从同步_mysql主从同步需打开哪些端口
- 2设置django orm 模型中的字段限制数值的大小
- 3【Pandas数据处理100例】(八十五):Pandas将DataFrame数据转化成字典数据_将下面的字典对象放入dataframe中,取出对象中的年龄,求出平均年龄,并输出。
- 4Web 第一个简单登录界面
- 5基于Java餐厅预约订座网站系统设计与实现(Springboot框架)毕业设计论文提纲大纲参考
- 6fastdfs-client使用
- 7Cmake编译 OPENCV_DNN_CUDA 报错: CMake Error at modules/dnn/CMakeLists.txt:39 (message):_dnn: cuda backend requires cudnn. please resolve d
- 85分钟彻底理解大端小端--Visual Studio查看内存地址的分析方法_visual studio 查看内存
- 97.25_established状态有ip地址
- 10puppeteer使用代理_puppeteer 无法挂s5代理
TensorRT(8):动态batch进行推理_tensorrt动态batchsize
赞
踩
TensorRT系列传送门(不定期更新): 深度框架|TensorRT
一、引言
模型训练时,每次训练可以接受不同batch大小的数据进行迭代,同样,在推理时,也会遇到输入Tensor大小(shape)是不确定的情况,其中最常见的就是动态batch了。
动态batch,故名思意,就是只batch大小不确定的情况,比如这次推理了一张图像,下次推理就需要同时推理两张图像。
在Tensorflow中,定义一个动态batch的Tensor可以用 -1来表示动态的维度
tf.placeholder(tf.float32, shape=(-1, 1024))
- 1
而在TensorRT中,又是如何定义动态维度的呢?
本篇文章主要记录一下博主在TensorRT中使用动态batch的一些方法及技巧,如有错误,欢迎指正。
二、TRT在线加载模型,并序列化保存支持动态batch的引擎
这里与之前固定batch建立engine的流程相似,也需要经历以下几个步骤
- 1、创建一个builder
- 3、创建一个netwok
- 4、建立一个 Parser
- 5、建立 engine
- 6、建议contex
区别时建议engine时,config里需要设置一下OptimizationProfile文件
- step1 准备工作
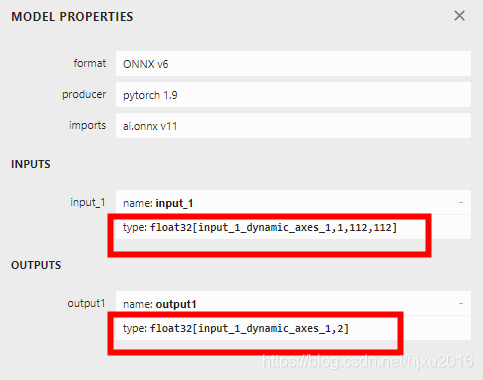
首先准备一个具有动态batch的onnx模型,
至于如何从pytorch转支持动态batch的onnx模型,我在另一篇文章中,做过介绍,具体见
转出后,可以用netron来查看,转持的onnx模型,是否支持动态维度。
- step2 序列化保存模型的函数
#include <iostream>
#include "NvInfer.h"
#include "NvOnnxParser.h"
#include "logging.h"
#include "opencv2/opencv.hpp"
#include <fstream>
#include <sstream>
#include "cuda_runtime_api.h"
static Logger gLogger;
using namespace nvinfer1;
bool saveEngine(const ICudaEngine& engine, const std::string& fileName)
{
std::ofstream engineFile(fileName, std::ios::binary);
if (!engineFile)
{
std::cout << "Cannot open engine file: " << fileName << std::endl;
return false;
}
IHostMemory* serializedEngine = engine.serialize();
if (serializedEngine == nullptr)
{
std::cout << "Engine serialization failed" << std::endl;
return false;
}
engineFile.write(static_cast<char*>(serializedEngine->data()), serializedEngine->size());
return !engineFile.fail();
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- step3 加载onnx模型,并构建动态Trt引擎
// 1、创建一个builder
IBuilder* pBuilder = createInferBuilder(gLogger);
// 2、 创建一个 network,要求网络结构里,没有隐藏的批量处理维度
INetworkDefinition* pNetwork = pBuilder->createNetworkV2(1U << static_cast<int>(NetworkDefinitionCreationFlag::kEXPLICIT_BATCH));
// 3、 创建一个配置文件
nvinfer1::IBuilderConfig* config = pBuilder->createBuilderConfig();
// 4、 设置profile,这里动态batch专属
IOptimizationProfile* profile = pBuilder->createOptimizationProfile();
// 这里有个OptProfileSelector,这个用来设置优化的参数,比如(Tensor的形状或者动态尺寸),
profile->setDimensions("input_1", OptProfileSelector::kMIN, Dims4(1, 1, 112, 112));
profile->setDimensions("input_1", OptProfileSelector::kOPT, Dims4(2, 1, 112, 112));
profile->setDimensions("input_1", OptProfileSelector::kMAX, Dims4(4, 1, 112, 112));
config->addOptimizationProfile(profile);
auto parser = nvonnxparser::createParser(*pNetwork, gLogger.getTRTLogger());
char* pchModelPth = "./res_hjxu_temp_dynamic.onnx";
if (!parser->parseFromFile(pchModelPth, static_cast<int>(gLogger.getReportableSeverity())))
{
printf("解析onnx模型失败\n");
}
int maxBatchSize = 4;
pBuilder->setMaxWorkspaceSize(1 << 30);
pBuilder->setMaxBatchSize(maxBatchSize);
设置推理模式
builder->setFp16Mode(true);
ICudaEngine* engine = pBuilder->buildEngineWithConfig(*pNetwork, *config);
std::string strTrtSavedPath = "./res_hjxu_temp_dynamic.trt";
// 序列化保存模型
saveEngine(*engine, strTrtSavedPath);
nvinfer1::Dims dim = engine->getBindingDimensions(0);
// 打印维度
print_dims(dim);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
这里print_dims就是打印维度
void print_dims(const nvinfer1::Dims& dim)
{
for (int nIdxShape = 0; nIdxShape < dim.nbDims; ++nIdxShape)
{
printf("dim %d=%d\n", nIdxShape, dim.d[nIdxShape]);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
可以看到,打印的dim0就是-1啦。

- step4 类IOptimizationProfile和枚举OptProfileSelector的简短介绍
我们可以看出,和固定batch构建engine不同之处,在设置build配置时时,增加了个IOptimizationProfile*配置文件,如设置维度需要增加以下操作
如
nvinfer1::IOptimizationProfile* createOptimizationProfile()
profile->setDimensions("input_1", OptProfileSelector::kMIN, Dims4(1, 1, 112, 112));
profile->setDimensions("input_1", OptProfileSelector::kOPT, Dims4(2, 1, 112, 112));
profile->setDimensions("input_1", OptProfileSelector::kMAX, Dims4(4, 1, 112, 112));
- 1
- 2
- 3
- 4
咱们来看看IOptimizationProfile这个类
class IOptimizationProfile
{
public:
//! 设置动态inputTensor的最小/最合适/最大维度
//! 不管时什么网络的输入的tensor,这个函数必须被调用三次(for the minimum, optimum, and maximum)
//! 一下列举了三种情况
//! (1) minDims.nbDims == optDims.nbDims == maxDims.nbDims == networkDims.nbDims
//! (2) 0 <= minDims.d[i] <= optDims.d[i] <= maxDims.d[i] for i = 0, ..., networkDims.nbDims-1
//! (3) if networkDims.d[i] != -1, then minDims.d[i] == optDims.d[i] == maxDims.d[i] == networkDims.d[i]
//! 如果选择了DLA,这三个值必须相同的
//!
virtual bool setDimensions(const char* inputName, OptProfileSelector select, Dims dims) noexcept = 0;
//! \brief Get the minimum / optimum / maximum dimensions for a dynamic input tensor.
virtual Dims getDimensions(const char* inputName, OptProfileSelector select) const noexcept = 0;
//! \brief Set the minimum / optimum / maximum values for an input shape tensor.
virtual bool setShapeValues(
const char* inputName, OptProfileSelector select, const int32_t* values, int32_t nbValues) noexcept
= 0;
//! \brief Get the number of values for an input shape tensor.
virtual int32_t getNbShapeValues(const char* inputName) const noexcept = 0;
//! \brief Get the minimum / optimum / maximum values for an input shape tensor.
virtual const int32_t* getShapeValues(const char* inputName, OptProfileSelector select) const noexcept = 0;
//! \brief Set a target for extra GPU memory that may be used by this profile.
//! \return true if the input is in the valid range (between 0 and 1 inclusive), else false
//!
virtual bool setExtraMemoryTarget(float target) noexcept = 0;
//! \brief Get the extra memory target that has been defined for this profile.
virtual float getExtraMemoryTarget() const noexcept = 0;
//! \brief Check whether the optimization profile can be passed to an IBuilderConfig object.
//! \return true if the optimization profile is valid and may be passed to an IBuilderConfig, else false
virtual bool isValid() const noexcept = 0;
protected:
~IOptimizationProfile() noexcept = default;
};
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
再看OptProfileSelector 这个枚举
这个枚举就三个值。最小、合适、和最大
// 最小和最大,指运行时,允许的最小和最大的范围
// 最佳值,用于选择内核,这里通常为运行时,最期望的大小
// 比如在模型推理时,有两路数据,通常batch就为2,batch为1或者为4出现的概率都比较低,
// 这时候,建议kOPT选择2, min选择1,如果最大路数为4,那max就选择四
- 1
- 2
- 3
- 4
enum class OptProfileSelector : int32_t
{
kMIN = 0, //!< This is used to set or get the minimum permitted value for dynamic dimensions etc.
kOPT = 1, //!< This is used to set or get the value that is used in the optimization (kernel selection).
kMAX = 2 //!< This is used to set or get the maximum permitted value for dynamic dimensions etc.
};
- 1
- 2
- 3
- 4
- 5
- 6
三、反序列化加载动态batch的引擎,并构建动态context,执行动态推理
定义一个加载engine的函数,和固定batch时一样的
ICudaEngine* loadEngine(const std::string& engine, int DLACore)
{
std::ifstream engineFile(engine, std::ios::binary);
if (!engineFile)
{
std::cout << "Error opening engine file: " << engine << std::endl;
return nullptr;
}
engineFile.seekg(0, engineFile.end);
long int fsize = engineFile.tellg();
engineFile.seekg(0, engineFile.beg);
std::vector<char> engineData(fsize);
engineFile.read(engineData.data(), fsize);
if (!engineFile)
{
std::cout << "Error loading engine file: " << engine << std::endl;
return nullptr;
}
IRuntime* runtime = createInferRuntime(gLogger);
if (DLACore != -1)
{
runtime->setDLACore(DLACore);
}
return runtime->deserializeCudaEngine(engineData.data(), fsize, nullptr);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
然后按以下步骤执行推理
- 创建engine
- 创建context
- 在显卡上创建最大batch的的内存空间,这样只需要创建一次,避免每次推理都重复创建,浪费时间
- 拷贝动态tensor的内存
- 设置动态维度,调用context->setBindingDimensions()函数
- 调用context执行推理
- 查看输出结果
void test_engine()
{
std::string strTrtSavedPath = "./res_hjxu_temp_dynamic.trt";
int maxBatchSize = 4;
// 1、反序列化加载引擎
ICudaEngine* engine = loadEngine(strTrtSavedPath, 0);
// 2、创建context
IExecutionContext* context = engine->createExecutionContext();
int nNumBindings = engine->getNbBindings();
std::vector<void*> vecBuffers;
vecBuffers.resize(nNumBindings);
int nInputIdx = 0;
int nOutputIndex = 1;
int nInputSize = 1 * 112 * 112 * sizeof(float);
// 4、在cuda上创建一个最大的内存空间
(cudaMalloc(&vecBuffers[nInputIdx], nInputSize * maxBatchSize));
(cudaMalloc(&vecBuffers[nOutputIndex], maxBatchSize * 2 * sizeof(float)));
char* pchImgPath = "./img.bmp";
cv::Mat matImg = cv::imread(pchImgPath, -1);
std::cout << matImg.rows << std::endl;
cv::Mat matRzImg;
cv::resize(matImg, matRzImg, cv::Size(112, 112));
cv::Mat matF32Img;
matRzImg.convertTo(matF32Img, CV_32FC1);
matF32Img = matF32Img / 255.;
for (int i = 0; i < maxBatchSize; ++i)
{
cudaMemcpy((unsigned char *)vecBuffers[nInputIdx] + nInputSize * i, matF32Img.data, nInputSize, cudaMemcpyHostToDevice);
}
// 动态维度,设置batch = 1 0指第0个tensor的维度
context->setBindingDimensions(0, Dims4(1, 1, 112, 112));
nvinfer1::Dims dim = context->getBindingDimensions(0);
context->executeV2(vecBuffers.data());
//context->execute(1, vecBuffers.data());
float prob[8];
(cudaMemcpy(prob, vecBuffers[nOutputIndex], maxBatchSize * 2 * sizeof(float), cudaMemcpyDeviceToHost));
for (int i = 0; i < 8; ++i)
{
std::cout << prob[i] << " ";
}
std::cout <<"\n-------------------------" << std::endl;
// 动态维度,设置batch = 4
context->setBindingDimensions(0, Dims4(4, 1, 112, 112));
context->executeV2(vecBuffers.data());
//context->execute(1, vecBuffers.data());
(cudaMemcpy(prob, vecBuffers[nOutputIndex], maxBatchSize * 2 * sizeof(float), cudaMemcpyDeviceToHost));
for (int i = 0; i < 8; ++i)
{
std::cout << prob[i] << " ";
}
std::cout << "\n-------------------------" << std::endl;
//std::cout << prob[0] << " " << prob[1] << std::endl;
// call api to release memory
/// ...
return ;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
结果打印中,可以看到,当batch为1时,输出后面6个值为0,当batch为4是,输出后面六个值都有正确的结果。咱们这里调用的是二分类的resnet50网络.


