
- 1学人工智能需要什么基础?_学ai需要哪些基础知识
- 2C语言中strlen函数的实现
- 3新手使用哪个Linux版本合适?_哪个linux系统更适合个人用户使用
- 4AI如何影响装饰器模式与组合模式的选择与应用
- 5python如何应用于人工智能_如何将Python用于DevOps?
- 6计算机毕业设计springboot动物防疫信息管理系统976nt9【附源码+数据库+部署+LW】_基于springboot的畜牧站疾病防控与检测管理系统的设计与实现数据库e-r模型设计
- 7云存储中常用的相同子策略的高效、安全的基于属性的访问控制的论文阅读
- 8NLTK包和语料库的准备_nltk中文语料库建立 conditionalfreqdist
- 9【LLM】本地部署Gemma模型(图文)_gemma 代码生成
- 10本地化部署方案 VS 云托管方案_本地化版本与云版本如何结合
STM32F103C8T6驱动舵机SG90 配置定时器TIM2,TIM3,TIM4的多种重映射模式下的不同IO口_stm32c8t6驱动舵机定时器3
赞
踩
STM32F103C8T6驱动舵机SG90 配置定时器TIM2,TIM3,TIM4的多种重映射模式下的不同IO口
1.使用到的工具介绍
2.整个简单介绍
3.程序的介绍
1.使用到的工具介绍:
keil5,烧写软件FlyMcu.exe,硬件为STM32F103C8T6板,SG90舵机还有按键。
2.整个简单介绍:
通过对舵机的了解我这里使用的是sg90舵机可旋转180度,使用的芯片是stm32f103c8t6。在配置2个按键来进行舵机角度加减,通过加减来改变舵机的角度变化;

| SG90舵机红线 | VCC线(接5v) |
|---|---|
| SG90舵机棕线 | GND线 |
| SG90舵机黄线 | 控制信号线 |
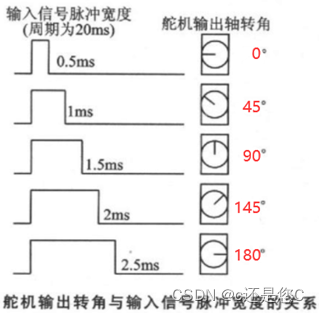
需要通过PWM来配置出各种角度的占空比,STM32F103的PWM可配置的IO口如下图,对TIM2,TIM3,TIM4都进行了配置也对各种重映射情况下的IO口配置。
简单方便使用时调用即可。再配置2个按键来改变TIM_SetCompare4(TIM3, i);中的i变量,就可以改变舵机的角度;i变量的取值范围在175-195之间变化对应0-180角度的范围。
TIM_SetCompare4(TIM3, i);//改变i的变量就可以改变舵机角度
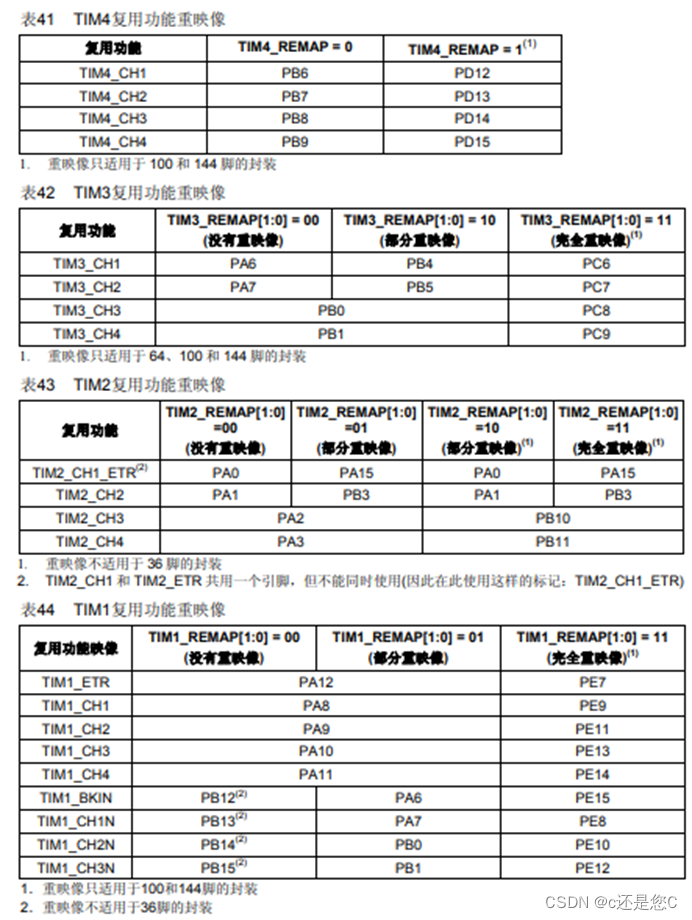
(1)根据STM32F103C8T6型号对TIM2的配置
①没有重映射 可以配置的IO口有CH1 PA0,CH2 PA1,CH3 PA2,CH4 PA3;
②部分重映射1 可以配置的IO口有CH1 PA15,CH2 PB3,CH3 PA2,CH4 PA3;
TIM2的部分重映射1使用到了PA15和PB3所以需要禁用掉JTAG功能,代码里加入
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,
ENABLE);//这条是关闭PB3,PB4,PA15做普通IO
③部分重映射2 可以配置的IO口有CH1 PA0,CH2 PA1,CH3 PB10,CH4 PB11;
④完全重映射 可以配置的IO口有CH1 PA15,CH2 PB3,CH3 PB10,CH4 PB11;
TIM2的完全重映射使用到了PA15和PB3所以需要禁用掉JTAG功能,代码里加入
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,
ENABLE);//这条是关闭PB3,PB4,PA15做普通IO
(2)根据STM32F103C8T6型号对TIM3的配置
①没有重映射 可以配置的IO口有CH1 PA6,CH2 PA7,CH3 PB0,CH4 PB1;
②部分重映射 可以配置的IO口有CH1 PB4,CH2 PB5,CH3 PB0,CH4 PB1;
TIM3的部分重映射使用到了PB4所以需要禁用掉JTAG功能,代码里加入
GPIO_PinRemapConfig(GPIO_Remap_SWJ_NoJTRST, ENABLE);//单独关闭PB4的JTAG功能
(3)根据STM32F103C8T6型号对TIM4的配置
①TIM4_REMAP = 0 没有重映射 可以配置的IO口有CH1 PB6,CH2 PB7,CH3 PB8,CH4 PB9;
3.程序的介绍
SG90.H中的代码
#ifndef __SG90_H #define __SG90_H #include "sys.h" //这里使用到的是stm32f103c8t6 有些io口配置不到 //这里只配置了普通定时器 TIM2 TIM3 TIM4 //SG90舵机驱动 0-180 角度 //通过变量来改变i这个数值就能改变舵机的角度 //这里的i的变量为175-195之中间就是0-180度的角度了 // TIM_SetCompare1(TIM3, i); // TIM_SetCompare2(TIM3, i); // TIM_SetCompare3(TIM3, i); // TIM_SetCompare4(TIM3, i); // 在key.h中有使用到 // 通过两按键实现加和键这个变量,进行角度的变化 //mode 0 1 2 3 有这4中模式 //0 没有重映射 可以配置的IO口有CH1 PA0,CH2 PA1,CH3 PA2,CH4 PA3; //1 部分重映射1 可以配置的IO口有CH1 PA15,CH2 PB3,CH3 PA2,CH4 PA3; //2 部分重映射2 可以配置的IO口有CH1 PA0,CH2 PA1,CH3 PB10,CH4 PB11; //3 完全重映射 可以配置的IO口有CH1 PA15,CH2 PB3,CH3 PB10,CH4 PB11; void TIM2_PwmSG90_Init(u8 mode); //mode 0 1 2 有这3中模式模式 //0 没有重映射 可以配置的IO口有CH1 PA6,CH2 PA7,CH3 PB0,CH4 PB1; //1 部分重映射 可以配置的IO口有CH1 PB4,CH2 PB5,CH3 PB0,CH4 PB1; //2 完全重映射 在stm32f103c8t6上没有这些pin口所以这里没有配置 可以配置的IO口有CH1 PC6,CH2 PC7,CH3 PC8 ,CH4 PC9; void TIM3_PwmSG90_Init(u8 mode); //mode 0 1 有这2中模式模式 //0 TIM4_REMAP = 0 没有重映射 可以配置的IO口有CH1 PB6,CH2 PB7,CH3 PB8,CH4 PB9; //1 TIM4_REMAP = 1 部分重映射 在stm32f103c8t6上没有这些pin口所以这里没有配置 可以配置的IO口有CH1 PD12,CH2 PD13,CH3 PD14,CH4 PD15; void TIM4_PwmSG90_Init(u8 mode); #endif

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
SG90.c中的代码
#include "SG90.H" //这里我使用的是stm32f103c8t6 //mode 0 1 2 3 有这4中模式 //0 没有重映射 可以配置的IO口有CH1 PA0,CH2 PA1,CH3 PA2,CH4 PA3; //1 部分重映射1 可以配置的IO口有CH1 PA15,CH2 PB3,CH3 PA2,CH4 PA3; //2 部分重映射2 可以配置的IO口有CH1 PA0,CH2 PA1,CH3 PB10,CH4 PB11; //3 完全重映射 可以配置的IO口有CH1 PA15,CH2 PB3,CH3 PB10,CH4 PB11; void TIM2_PwmSG90_Init(u8 mode) { GPIO_InitTypeDef PWM_Initstructure; //定义GPIO端口结构体 TIM_TimeBaseInitTypeDef TIM_Initstructure; //定义TIM结构体 TIM_OCInitTypeDef OC_Initstructure; //定义输出比较结构体 if(mode==0) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO, ENABLE); //打开端口和复用时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //打开定时器的时钟 //这里设置的是没有重映射的设置所以可以配置的IO口有CH1 PA0,CH2 PA1,CH3 PA2,CH4 PA3; PWM_Initstructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3; PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP; PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &PWM_Initstructure); } if(mode==1) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOA| RCC_APB2Periph_AFIO, ENABLE); //打开端口和复用时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //打开定时器的时钟 GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE);//设置端口重映射: //这里设置的是部分重映射1 可以配置的IO口有CH1 PA15,CH2 PB3,CH3 PA2,CH4 PA3; // // GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable, ENABLE);; //使用PA15,PB3所需要关掉的下载口需要禁用JTAG才能使用 这条是关闭5个IO口 GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);//这条是关闭PB3,PB4,PA15做普通IO //GPIO_Remap_SWJ_Disable 关闭所有跟JTAG有关的引脚 PWM_Initstructure.GPIO_Pin = GPIO_Pin_15|GPIO_Pin_2|GPIO_Pin_3; PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP; PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &PWM_Initstructure); PWM_Initstructure.GPIO_Pin = GPIO_Pin_3; PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP; PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &PWM_Initstructure); } if(mode==2) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOA| RCC_APB2Periph_AFIO, ENABLE); //打开端口和复用时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //打开定时器的时钟 GPIO_PinRemapConfig(GPIO_PartialRemap2_TIM2, ENABLE);//设置端口重映射: //这里设置的是部分重映射2 可以配置的IO口有CH1 PA0,CH2 PA1,CH3 PB10,CH4 PB11; PWM_Initstructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1; PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP; PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &PWM_Initstructure); PWM_Initstructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11; PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP; PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &PWM_Initstructure); } if(mode==3) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOA| RCC_APB2Periph_AFIO, ENABLE); //打开端口和复用时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //打开定时器的时钟 GPIO_PinRemapConfig(GPIO_FullRemap_TIM2, ENABLE);//设置端口重映射: //这里设置的是部分重映射2 可以配置的IO口有CH1 PA15,CH2 PB3,CH3 PB10,CH4 PB11 // // GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable, ENABLE);; //使用PA15,PB3所需要关掉的下载口需要禁用JTAG才能使用 这条是关闭5个IO口 GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);//这条是关闭PB3,PB4,PA15做普通IO //GPIO_Remap_SWJ_Disable 关闭所有跟JTAG有关的引脚 PWM_Initstructure.GPIO_Pin = GPIO_Pin_15; PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP; PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &PWM_Initstructure); PWM_Initstructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_10|GPIO_Pin_11; PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP; PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &PWM_Initstructure); } //下面的配置都一样 TIM_Initstructure.TIM_ClockDivision = TIM_CKD_DIV1; //不分频 TIM_Initstructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数 TIM_Initstructure.TIM_Period = 200-1; TIM_Initstructure.TIM_Prescaler = 7200-1; TIM_TimeBaseInit(TIM2, &TIM_Initstructure); TIM_Cmd(TIM2, ENABLE); //使能时钟 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC1Init(TIM2, &OC_Initstructure); //输出比较初始化 TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC2Init(TIM2, &OC_Initstructure); //输出比较初始化 TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC3Init(TIM2, &OC_Initstructure); //输出比较初始化 TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC4Init(TIM2, &OC_Initstructure); //输出比较初始化 TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 } //mode 0 1 2 有这3中模式 //0 没有重映射 可以配置的IO口有CH1 PA6,CH2 PA7,CH3 PB0,CH4 PB1; //1 部分重映射 可以配置的IO口有CH1 PB4,CH2 PB5,CH3 PB0,CH4 PB1; //2 完全重映射 在stm32f103c8t6上没有这些pin口所以这里没有配置 可以配置的IO口有CH1 PC6,CH2 PC7,CH3 PC8 ,CH4 PC9; void TIM3_PwmSG90_Init(u8 mode) { GPIO_InitTypeDef PWM_Initstructure; //定义GPIO端口结构体 TIM_TimeBaseInitTypeDef TIM_Initstructure; //定义TIM结构体 TIM_OCInitTypeDef OC_Initstructure; //定义输出比较结构体 if(mode==0) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOA| RCC_APB2Periph_AFIO, ENABLE); //打开端口和复用时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //打开定时器的时钟 //这里设置的是没有重映射的设置所以可以配置的IO口有CH1 PA6,CH2 PA7,CH3 PB0,CH4 PB1; PWM_Initstructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP; PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &PWM_Initstructure); PWM_Initstructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1; PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP; PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &PWM_Initstructure); } if(mode==1) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //打开端口和复用时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //打开定时器的时钟 GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);//设置端口重映射: //这里设置的是部分重映射可以配置的IO口有CH1 PB4,CH2 PB5,CH3 PB0 ,CH4 PB1; //GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable,ENABLE);//使用PB4所需要关掉的下载口需要禁用JTAG才能使用 //GPIO_Remap_SWJ_Disable 关闭所有跟JTAG有关的引脚 GPIO_PinRemapConfig(GPIO_Remap_SWJ_NoJTRST, ENABLE);//单独关闭PB4的JTAG功能 PWM_Initstructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_4|GPIO_Pin_5; PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP; PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &PWM_Initstructure); } //下面的配置都一样 TIM_Initstructure.TIM_ClockDivision = TIM_CKD_DIV1; //不分频 TIM_Initstructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数 TIM_Initstructure.TIM_Period = 200-1; TIM_Initstructure.TIM_Prescaler = 7200-1; TIM_TimeBaseInit(TIM3, &TIM_Initstructure); TIM_Cmd(TIM3, ENABLE); //使能时钟 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC1Init(TIM3, &OC_Initstructure); //输出比较初始化 TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC2Init(TIM3, &OC_Initstructure); //输出比较初始化 TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC3Init(TIM3, &OC_Initstructure); //输出比较初始化 TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC4Init(TIM3, &OC_Initstructure); //输出比较初始化 TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 } //mode 0 1 有这2中模式 //0 TIM4_REMAP = 0 没有重映射 可以配置的IO口有CH1 PB6,CH2 PB7,CH3 PB8,CH4 PB9; //1 TIM4_REMAP = 1 部分重映射 在stm32f103c8t6上没有这些pin口所以这里没有配置 可以配置的IO口有CH1 PD12,CH2 PD13,CH3 PD14,CH4 PD15; void TIM4_PwmSG90_Init(u8 mode) { GPIO_InitTypeDef PWM_Initstructure; //定义GPIO端口结构体 TIM_TimeBaseInitTypeDef TIM_Initstructure; //定义TIM结构体 TIM_OCInitTypeDef OC_Initstructure; //定义输出比较结构体 if(mode==0) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO, ENABLE); //打开端口和复用时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //打开定时器的时钟 //这里设置的是没有重映射的设置所以可以配置的IO口有CH1 PB6,CH2 PB7,CH3 PB8,CH4 PB9; PWM_Initstructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9; PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP; PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &PWM_Initstructure); } //下面的配置都一样 TIM_Initstructure.TIM_ClockDivision = TIM_CKD_DIV1; //不分频 TIM_Initstructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数 TIM_Initstructure.TIM_Period = 200-1; TIM_Initstructure.TIM_Prescaler = 7200-1; TIM_TimeBaseInit(TIM4, &TIM_Initstructure); TIM_Cmd(TIM4, ENABLE); //使能时钟 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC1Init(TIM4, &OC_Initstructure); //输出比较初始化 TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC2Init(TIM4, &OC_Initstructure); //输出比较初始化 TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC3Init(TIM4, &OC_Initstructure); //输出比较初始化 TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式 OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能 OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 TIM_OC4Init(TIM4, &OC_Initstructure); //输出比较初始化 TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
key.h中的代码
#ifndef __KEY_H
#define __KEY_H
#include "sys.h"
#define KEY0 PAin(0)
#define KEY1 PAin(7)
void KEY_Init(void);//IO初始
u8 KEY_OUT(void);
void TIM3_PWMSG90_RUN(void);
void TIM4_PWMSG90_RUN(void);
void TIM2_PWMSG90_RUN(void);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
key.c中的代码
#include "stm32f10x.h" #include "key.h" #include "sys.h" #include "delay.h" u8 KEY_jia_jian=195; //按键初始化函数 void KEY_Init(void) //IO初始化 { GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//使能PORTA,PORTE时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_7;//KEY0-KEY2 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入 GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOE2,3,4 } //返回KEY_jia_jian按键加减数据 u8 KEY_OUT(void)// { if(KEY0==0) { if(KEY_jia_jian<196) { KEY_jia_jian++; return KEY_jia_jian; } if(KEY_jia_jian==196) { KEY_jia_jian=175; return KEY_jia_jian; } } if(KEY1==0) { if(KEY_jia_jian==174) { KEY_jia_jian=195; return KEY_jia_jian; } if(KEY_jia_jian>174) { KEY_jia_jian--; return KEY_jia_jian; } } return KEY_jia_jian; } void TIM3_PWMSG90_RUN(void) { u8 i; i=KEY_OUT();//设置一个变量来带提他 TIM_SetCompare1(TIM3, i); TIM_SetCompare2(TIM3, i); TIM_SetCompare3(TIM3, i); TIM_SetCompare4(TIM3, i); } void TIM4_PWMSG90_RUN(void) { u8 i; i=KEY_OUT();//设置一个变量来带提他 TIM_SetCompare1(TIM4, i); TIM_SetCompare2(TIM4, i); TIM_SetCompare3(TIM4, i); TIM_SetCompare4(TIM4, i); } void TIM2_PWMSG90_RUN(void) { u8 i; i=KEY_OUT();//设置一个变量来带提他 TIM_SetCompare1(TIM2, i); TIM_SetCompare2(TIM2, i); TIM_SetCompare3(TIM2, i); TIM_SetCompare4(TIM2, i); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
mian.c中的代码
#include "sys.h" #include "delay.h" #include "usart.h" #include "led.h" #include "SG90.H" #include "key.h" int main(void) { delay_init(); //延时函数初始化 TIM3_PwmSG90_Init(1);//pwm函数初始化 //TIM4_PwmSG90_Init(0); //TIM2_PwmSG90_Init(1); KEY_Init();//按键初始化 while(1) { TIM3_PWMSG90_RUN(); // TIM3_PWMSG90_RUN(); //TIM2_PWMSG90_RUN(); delay_ms(500); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
以后就是全部的代码了

