
- 1RPM与YUM
- 2第五阶段-第五阶段高性能分布式缓存Redis
- 3接私活必备的 10 个开源项目!_哪些开源框架适合接单
- 4谷歌推出通用AI代理:能自动执行600多种动作,游玩复杂3D游戏
- 5前端面试题——综合问题(整理)_前端面试题综合编码题
- 6Semeval 14 restaurant 实战_semeval 2014,csv
- 7java-jsp基于JAVAWEB医院挂号系统jep98[独有源码]如何找到适合自己的毕业设计的指南_4.医院排队叫号系统web
- 8熬夜30天吃透这九大Java核心专题,我收割了3个大厂offer
- 9阿里天池金融风控-贷款违约预测xgboost回归_天池金融风控违约预测xgboost
- 10PMP学习笔记(四)_pmp学习笔记(四) 松哥的博客
机器视觉之ros人脸识别
赞
踩
系列文章目录
机器视觉之ros人脸识别
ros人脸识别
一、WIN下的环境设置
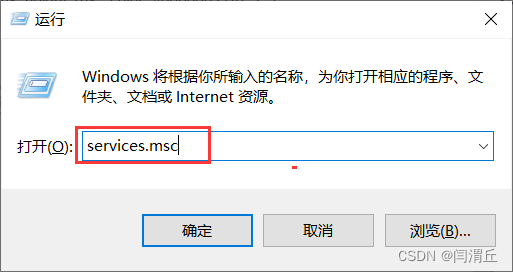
WIN + R打开WIN的运行界面,打开系统组件管理策略
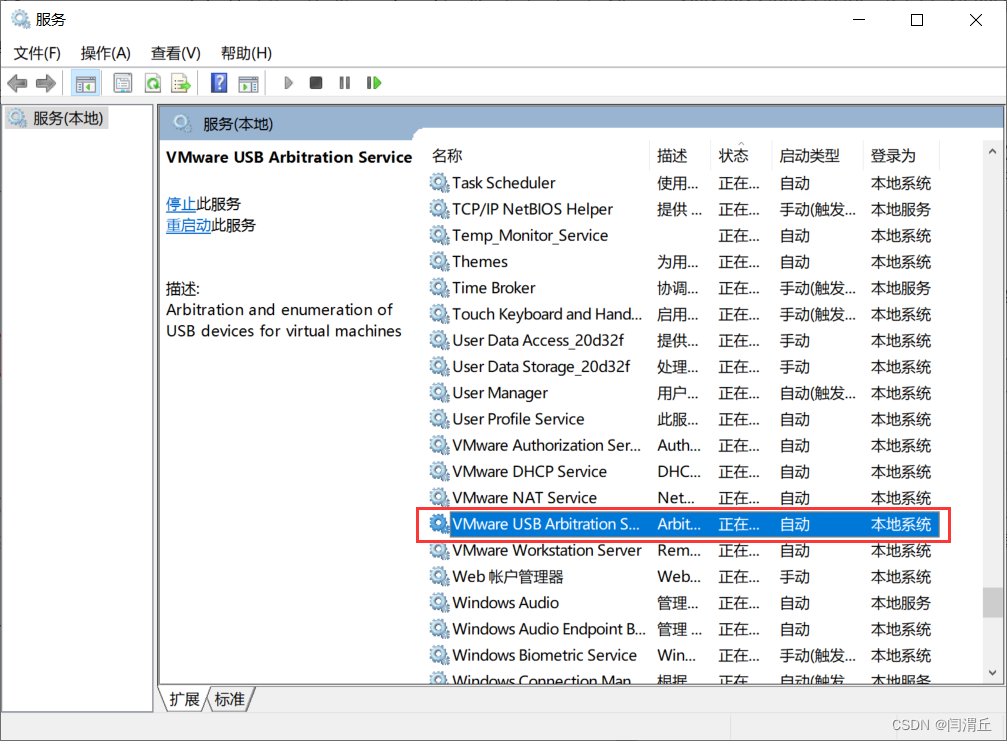
找到Vmware USB ArbService服务确定其为启动状态
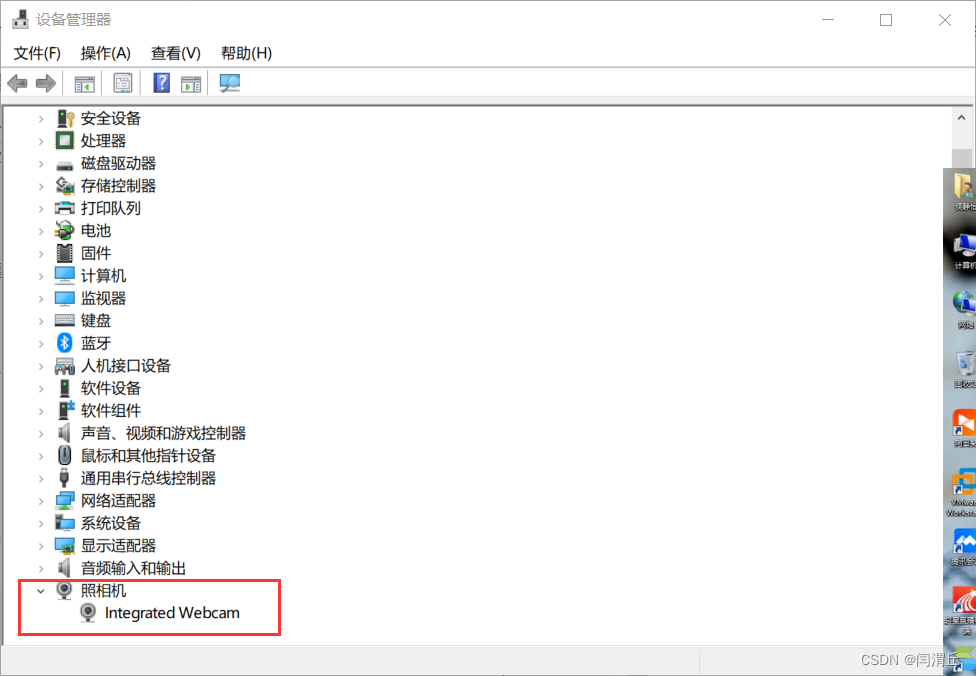
打开设备管理器

打开设备管理器确保有摄像头
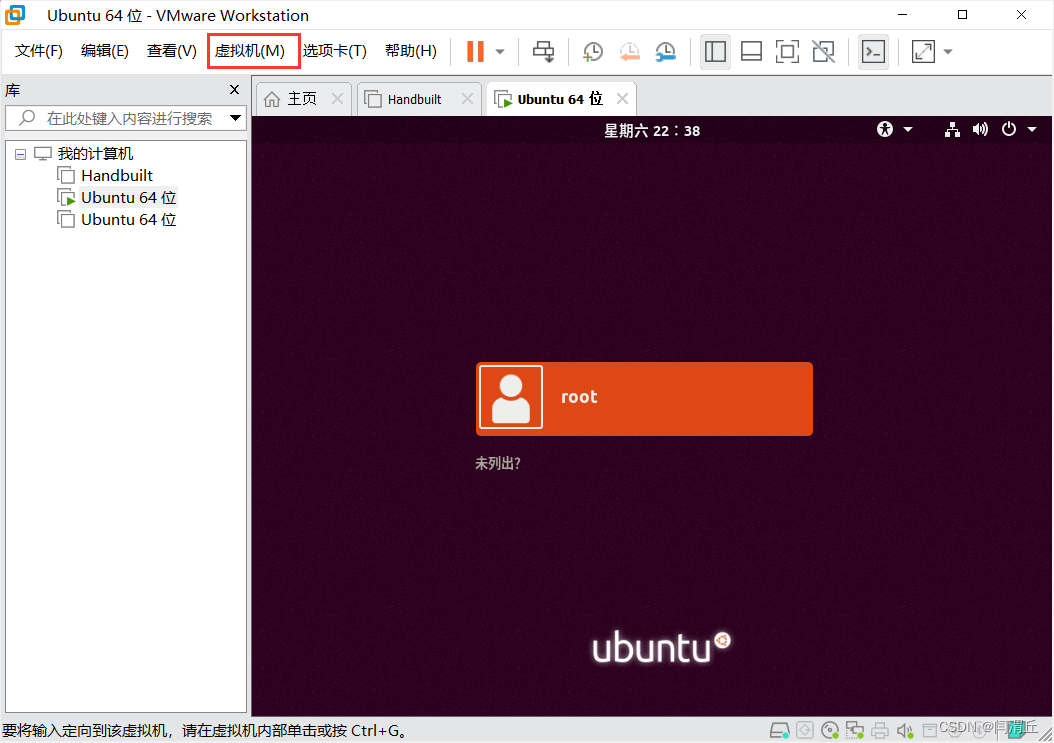
启动VM虚拟机,在虚拟机中可移动设备下给Camera设备打勾
二、连接摄像头设备到虚拟机
启动VM虚拟机,在VM软件点虚拟机里面的可移动设备,点开Camera设备并且连接到虚拟机上

点击确定
此时摄像头设备连接到虚拟机上面了

三、安装摄像头驱动设备
调用摄像头设备需要驱动包,ros下大多数通用的功能包交usb_cam,也有uvc_cam
3.1判断安装usb还是uvc驱动包
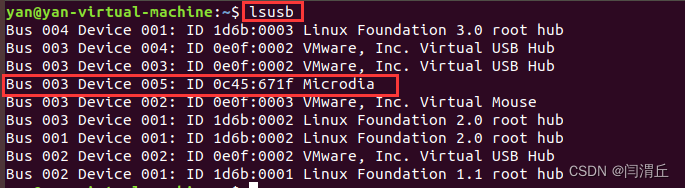
在终端查询usb设备ID,去网址查看id 0c45:671f
网址有该ID就是uvc没有则是usb,我这款摄像头是usb
3.2查看摄像头设备
为了确保摄像头确实从WIN连接到虚拟机
笔记本默认自带摄像头是video0

3.3测试网络摄像头
安装cheese软件包(服务),测试摄像头能否正常使用

如果出现无法获得锁问题,直接删掉存放该锁的目录即可


安装好cheese服务后,执行cheese,摄像头打开,这个时候你可以看见你的脸了
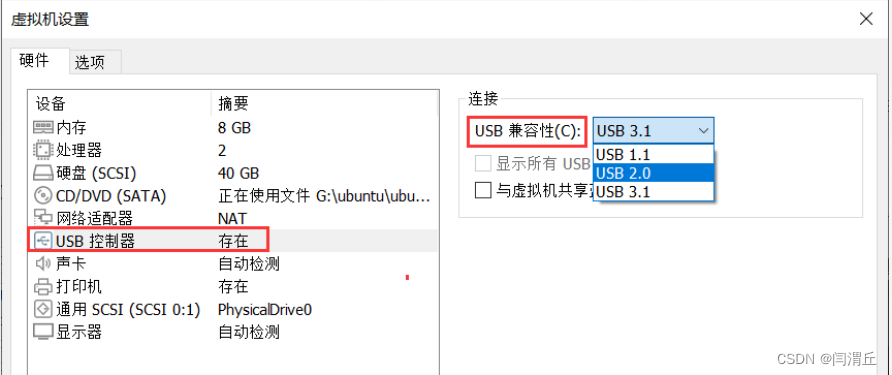
如果摄像头出现黑屏或者花屏,则修改usb兼容性,将usb兼容性都试一遍,找到合适的兼容性
3.4安装摄像头驱动包
我的摄像头设备驱动是用usb_cam,以下内容是根据usb_cam驱动包完成
根据你的ros版本安装,我的是melodic
如果其余版本则sudo apt-get install ros-(kinetic/noetic)-usb-cam来安装对应版本ros摄像头设备的驱动包

四、调用视觉功能包
将robot_vision文件夹拷贝进ros工作空间的src文件夹中
默认安装后的VM不能直接通过拖拉把WIN下的文件拖到虚拟机中指定的文件夹下,想要实现该功能需要安装下VM Tools
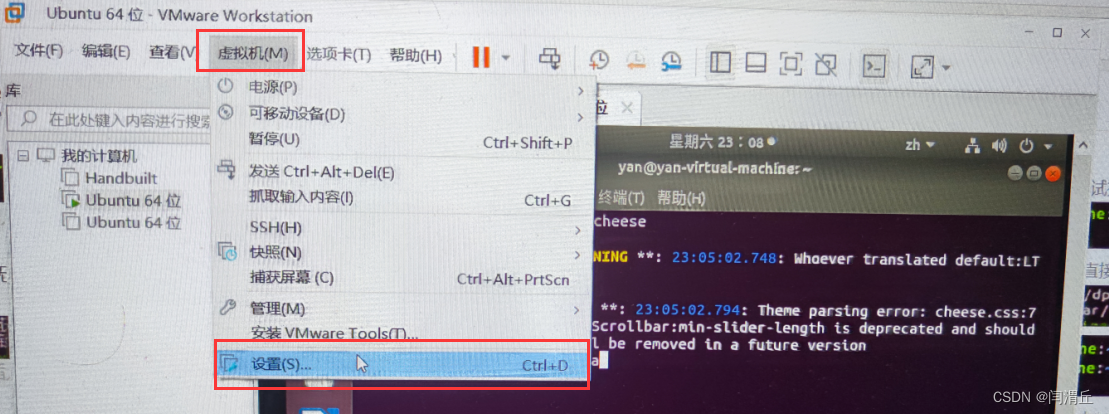
安装VM Tools过程

在环境变量中加入你的路径


运行视觉检测

出现报错

安装该功能包

再次执行,此时你可以看见自己脸蛋了

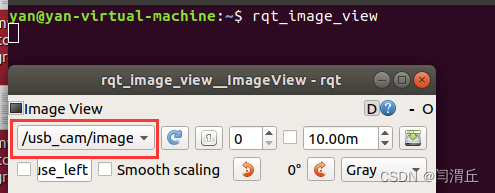
打开一个新的终端,运行实时的界面

需要安装该功能包


此时运行成功

打开界面后,订阅摄像头图像话题/usb_cam/image_raw即可显示图像。
测试完毕后,在原先所有的终端下ctrl + c终止进程
五、人脸识别的调用
打开一个终端

再新打开一个终端

再新打开一个终端

在rqt图形界面内出现图像,订阅/cv_bridge_image消息,稍后出现绿框框住脸部;

此时,人脸识别就完成了

