
热门标签
热门文章
- 1git的常用语句_git语句大全
- 2【蓝桥杯】Python自带编辑器IDLE的使用教程_python蓝桥杯编译器
- 3BERT、BART、T5 等LLM大语言模型的比较分析_bart模型和t5
- 48种方案,保证缓存和数据库的最终一致性_缓存和数据库一致性同步解决方案
- 5【Transformer】什么是transformer? transformer输入输出是什么。transformer用于GPT的方法。tranformer的代码。chat-gpt_transformer编码器和解码器两个部分都包含输入该怎么理解呢
- 6RK3588 MIPIRX接收RGB888/RGB565/RGB666调试_rk3588 mipi dcphy dts
- 7C#调用Python程序的两种方法_c# python 相互调用
- 8谈谈程序员在传统企业的转型升级之路_传统公司程序员
- 9VMware vSphere 服务器虚拟化之二十七 桌面虚拟化之View中使用Thinapp软件虚拟化_thinapp的license
- 10【解决】Invalid hash given_fatal: invalid hash
当前位置: article > 正文
ROS: an open-source Robot Operating System
作者:Cpp五条 | 2024-04-26 13:12:55
赞
踩
ros: an open-source robot operating system
ROS: an open-source Robot Operating System
PS:ROS论文原文,后悔当年没看到
学ROS已经是许多年之前的事情了,当时基本就是用一用API,感觉ros还挺牛。最近看了看ROS2,主要是在分布式和实时性上做了改进,然后又好奇ROS的实现了,扒了原文和代码,比刚开始确实有些长进,做些记录。
Introduction
ROS的目的是减少造轮子,这一点确实做的不错,我们组之前光消息队列就选好几种,后来好歹统一成mqtt了。另外作者很谦虚,说ROS并不是robotics的通解,由于ROS是BSD协议,个人也很想基于这个和特定背景做些东西,挖坑了。
Design goals
这部分蛮重要的,其实是ROS的设计哲学,一共就五条。
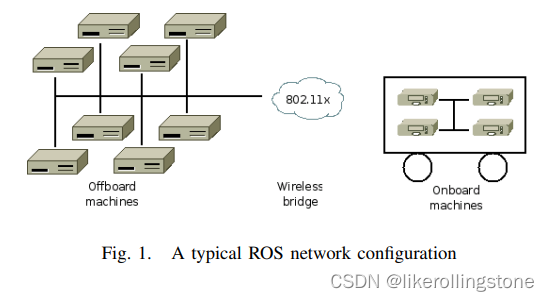
• Peer-to-peer
• Tools-based
• Multi-lingual 这一部分挺重要的,学习学习。
• Thin
• Free and Open-Source
NOMENCLATURE
USE CASES
CONCLUSION
ACKNOWLEDGEMENTS
感谢社区,感谢Octave 、LISP。
没用过LISP,Octave推荐,一言以蔽之,开源matlab。
资源下载
链接:https://pan.baidu.com/s/14wBSlDeInxox6C9egk9UjA
提取码:jenk
本文内容由网友自发贡献,转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

