
- 1鸿蒙应用开发 闹钟实现_鸿蒙开发实现倒计时
- 2yum安装python3_centos 安装python3详细指南
- 3CSS 详解grid布局(网格布局)与应用
- 4吴恩达机器学习-可选实验室:简单神经网络(Simple Neural Network)
- 5Android N Audio: Audio Track play_audio_port_type_t
- 6AI帮忙做论文笔记——高端Prompt技巧——chatGPT时代背景下文献阅读新范式_阅读论文的prompt
- 7平时多看看---前端中小厂一二线城市薪资水平报告_中厂初级前端月薪多少
- 8H3C-Cloud Lab实验-静态路由配置实验_h3c cloud lab
- 9php添加图片水印类,PHP图片水印类的封装
- 10ft232 mac usb串口驱动_【电路“芯”说】聊聊你知道的串口
Harmony鸿蒙南向驱动开发-I3C
赞
踩
I3C(Improved Inter Integrated Circuit)总线是由MIPI Alliance开发的一种简单、低成本的双向二线制同步串行总线。
I3C是两线双向串行总线,针对多个传感器从设备进行了优化,并且一次只能由一个I3C主设备控制。相比于I2C,I3C总线拥有更高的速度、更低的功耗,支持带内中断、从设备热接入以及切换当前主设备,同时向后兼容I2C从设备。
I3C增加了带内中断(In-Bind Interrupt)功能,支持I3C设备进行热接入操作,弥补了I2C总线需要额外增加中断线来完成中断的不足。I3C总线上允许同时存在I2C设备、I3C从设备和I3C次级主设备。
基本概念
-
IBI(In-Band Interrupt):带内中断。
在SCL线没有启动信号时,I3C从设备可以通过拉低SDA线使主设备发出SCL启动信号,从而发出带内中断请求。若有多个从设备同时发出中断请求,I3C主设备则通过从设备地址进行仲裁,低地址优先相应。
-
DAA(Dynamic Address Assignment):动态地址分配。
I3C支持对从设备地址进行动态分配从而避免地址冲突。在分配动态地址之前,连接到I3C总线上的每个I3C/I2C设备都应以两种方式之一来唯一标识:
-
设备可能有一个符合I2C规范的静态地址,主机可以使用此静态地址。
-
在任何情况下,I3C设备均应具有48位的临时ID。除非设备具有静态地址且主机使用静态地址,否则主机应使用此48位临时ID。
-
-
CCC(Common Command Code):通用命令代码。
所有I3C设备均支持CCC,可以直接将其传输到特定的I3C从设备,也可以同时传输到所有I3C从设备。
-
BCR(Bus Characteristic Register):总线特性寄存器。
每个连接到I3C总线的I3C设备都应具有相关的只读总线特性寄存器(BCR),该寄存器描述了I3C兼容设备在动态地址分配和通用命令代码中的作用和功能。
-
DCR(Device Characteristic Register):设备特性寄存器。
连接到I3C总线的每个I3C设备都应具有相关的只读设备特性寄存器(DCR),该寄存器描述了用于动态地址分配和通用命令代码的I3C兼容设备类型(例如加速度计、陀螺仪等)。
运作机制
在HDF框架中,同类型控制器对象较多时(可能同时存在十几个同类型控制器),如果采用独立服务模式则需要配置更多的设备节点,且相关服务会占据更多的内存资源。相反,采用统一服务模式可以使用一个设备服务作为管理器,统一处理所有同类型对象的外部访问(这会在配置文件中有所体现),实现便捷管理和节约资源的目的。I3C模块采用统一服务模式(如图1)。
I3C模块各分层的作用为:
-
接口层:提供打开设备,写入数据,关闭设备的能力。
-
核心层:主要负责服务绑定、初始化以及释放管理器,并提供添加、删除以及获取控制器的能力。由于框架需要统一管理I3C总线上挂载的所有设备,因此还提供了添加、删除以及获取设备的能力,以及中断回调函数。
-
适配层:由驱动适配者实现与硬件相关的具体功能,如控制器的初始化等。
在统一模式下,所有的控制器都被核心层统一管理,并由核心层统一发布一个服务供接口层,因此这种模式下驱动无需再为每个控制器发布服务。

约束与限制
I3C模块当前仅支持轻量和小型系统内核(LiteOS-A) 。
开发指导
场景介绍
I3C可连接单个或多个I3C、I2C从器件,它主要用于:
-
与传感器通信,如陀螺仪、气压计或支持I3C协议的图像传感器等。
-
通过软件或硬件协议转换,与其他通信接口(如UART串口等)的设备进行通信。
当驱动开发者需要将I3C设备适配到OpenHarmony时,需要进行I3C驱动适配,下文将介绍如何进行I3C驱动适配。
接口说明
为了保证上层在调用I3C接口时能够正确的操作硬件,核心层在//drivers/hdf_core/framework/support/platform/include/i3c/i3c_core.h中定义了以下钩子函数。驱动适配者需要在适配层实现这些函数的具体功能,并与这些钩子函数挂接,从而完成接口层与核心层的交互。
I3cMethod定义:
- struct I3cMethod {
- int32_t (*sendCccCmd)(struct I3cCntlr *cntlr, struct I3cCccCmd *ccc);
- int32_t (*transfer)(struct I3cCntlr *cntlr, struct I3cMsg *msgs, int16_t count);
- int32_t (*i2cTransfer)(struct I3cCntlr *cntlr, struct I3cMsg *msgs, int16_t count);
- int32_t (*setConfig)(struct I3cCntlr *cntlr, struct I3cConfig *config);
- int32_t (*getConfig)(struct I3cCntlr *cntlr, struct I3cConfig *config);
- int32_t (*requestIbi)(struct I3cDevice *dev);
- void (*freeIbi)(struct I3cDevice *dev);
- };
表 1 I3cMethod结构体成员的钩子函数功能说明
| 函数成员 | 入参 | 出参 | 返回值 | 功能 |
|---|---|---|---|---|
| sendCccCmd | cntlr:结构体指针,核心层I3C控制器 ccc:传入的通用命令代码结构体指针 | ccc:传出的通用命令代码结构体指针 | HDF_STATUS相关状态 | 发送CCC(Common command Code,即通用命令代码) |
| Transfer | cntlr:结构体指针,核心层I3C控制器 msgs:结构体指针,用户消息 count:int16_t,消息数量 | msgs:结构体指针,用户消息 | HDF_STATUS相关状态 | 使用I3C模式传递用户消息 |
| i2cTransfer | cntlr:结构体指针,核心层I3C控制器 msgs:结构体指针,用户消息 count:int16_t,消息数量 | msgs:结构体指针,用户消息 | HDF_STATUS相关状态 | 使用I2C模式传递用户消息 |
| setConfig | cntlr:结构体指针,核心层I3C控制器 config:控制器配置参数 | 无 | HDF_STATUS相关状态 | 设置I3C控制器配置参数 |
| getConfig | cntlr:结构体指针,核心层I3C控制器 | config:控制器配置参数 | HDF_STATUS相关状态 | 获取I3C控制器配置参数 |
| requestIbi | device:结构体指针,核心层I3C设备 | 无 | HDF_STATUS相关状态 | 为I3C设备请求IBI(In-Bind Interrupt,即带内中断) |
| freeIbi | device:结构体指针,核心层I3C设备 | 无 | HDF_STATUS相关状态 | 释放IBI |
开发步骤
I3C模块适配包含以下五个步骤:
-
实例化驱动入口
-
实例化HdfDriverEntry结构体成员。
-
调用HDF_INIT将HdfDriverEntry实例化对象注册到HDF框架中。
-
-
配置属性文件
-
在device_info.hcs文件中添加deviceNode描述。
-
【可选】添加i3c_config.hcs器件属性文件。
-
-
实例化I3C控制器对象
-
初始化I3cCntlr成员。
-
实例化I3cCntlr成员I3cMethod方法集合,其定义和成员函数说明见下文。
-
-
注册中断处理子程序
为控制器注册中断处理程序,实现设备热接入和IBI(带内中断)功能。
-
驱动调试
【可选】针对新增驱动程序,建议验证驱动基本功能,例如挂载后的测试用例是否成功,数据能否传输等。
开发实例
下方将以Hi3516DV300的虚拟驱动//drivers/hdf_core/framework/test/unittest/platform/virtual/i3c_virtual.c为示例,展示需要驱动适配者提供哪些内容来完整实现设备功能。
-
实例化驱动入口 驱动入口必须为HdfDriverEntry(在//drivers/hdf_core/framework/include/core/hdf_device_desc.h中定义)类型的全局变量,且moduleName要和device_info.hcs中保持一致。HDF框架会将所有加载的驱动的HdfDriverEntry对象首地址汇总,形成一个类似数组的段地址空间,方便上层调用。
一般在加载驱动时HDF会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
I3C驱动入口参考:
说明:
I3C控制器会出现很多个控制器挂接的情况,因而在HDF框架中首先会为此类型的控制器创建一个管理器对象,并同时对外发布一个管理器服务来统一处理外部访问。这样,用户需要打开某个控制器时,会先获取到管理器服务,然后管理器服务根据用户指定参数查找到指定控制器。I3C管理器服务的驱动由核心层实现,驱动适配者不需要关注这部分内容的实现,但在实现Init函数的时候需要调用核心层的I3cCntlrAdd函数,它会实现相应功能。
- static struct HdfDriverEntry g_virtualI3cDriverEntry = {
- .moduleVersion = 1,
- .Init = VirtualI3cInit,
- .Release = VirtualI3cRelease,
- .moduleName = "virtual_i3c_driver", // 【必要且与hcs文件中的名字匹配】
- };
- HDF_INIT(g_virtualI3cDriverEntry); // 调用HDF_INIT将驱动入口注册到HDF框架中
- // 核心层i3c_core.c管理器服务的驱动入口
- struct HdfDriverEntry g_i3cManagerEntry = {
- .moduleVersion = 1,
- .Init = I3cManagerInit,
- .Release = I3cManagerRelease,
- .moduleName = "HDF_PLATFORM_I3C_MANAGER", // 这与device_info.hcs文件中device0对应
- };
- HDF_INIT(g_i3cManagerEntry);

-
配置属性文件 完成驱动入口注册之后,下一步请在//vendor/hisilicon/hispark_taurus/hdf_config/device_info/device_info.hcs文件中添加deviceNode信息,并在i3c_config.hcs中配置器件属性。deviceNode信息与驱动入口注册相关,器件属性值对于驱动适配者的驱动实现以及核心层I3cCntlr相关成员的默认值或限制范围有密切关系。
统一服务模式的特点是device_info.hcs文件中第一个设备节点必须为I3C管理器,其各项参数必须如表2设置:
表 2 device_info.hcs节点参数说明
成员名 值 policy 驱动服务发布的策略,I3C管理器具体配置为0,表示驱动不需要发布服务 priority 驱动启动优先级(0-200),值越大优先级越低。I3C管理器具体配置为52 permission 驱动创建设备节点权限,I3C管理器具体配置为0664 moduleName 驱动名称,I3C管理器固定为HDF_PLATFORM_I3C_MANAGER serviceName 驱动对外发布服务的名称,I3C管理器服务名设置为HDF_PLATFORM_I3C_MANAGER deviceMatchAttr 驱动私有数据匹配的关键字,I3C管理器没有使用,可忽略 从第二个节点开始配置具体I3C控制器信息,此节点并不表示某一路I3C控制器,而是代表一个资源性质设备,用于描述一类I3C控制器的信息。本例只有一个I3C控制器,如有多个控制器,则需要在device_info.hcs文件增加deviceNode信息,以及在i3c_config文件中增加对应的器件属性。
-
device_info.hcs配置参考
- root {
- device_i3c :: device {
- device0 :: deviceNode {
- policy = 0;
- priority = 52;
- permission = 0644;
- serviceName = "HDF_PLATFORM_I3C_MANAGER";
- moduleName = "HDF_PLATFORM_I3C_MANAGER";
- }
- }
- i3c_virtual :: deviceNode {
- policy = 0; // 等于0,不需要发布服务。
- priority = 56; // 驱动启动优先级。
- permission = 0644; // 驱动创建设备节点权限。
- moduleName = "virtual_i3c_driver"; // 【必要】用于指定驱动名称,需要与期望的驱动Entry中的moduleName一致。
- serviceName = "VIRTUAL_I3C_DRIVER"; // 【必要】驱动对外发布服务的名称,必须唯一。
- deviceMatchAttr = "virtual_i3c"; // 【必要】用于配置控制器私有数据,要与i3c_config.hcs中对应控制器保持一致。
- } // 具体的控制器信息在i3c_config.hcs中。
- }
-
i3c_config.hcs 配置参考
- root {
- platform {
- i3c_config {
- match_attr = "virtual_i3c"; // 【必要】需要和device_info.hcs中的deviceMatchAttr值一致
- template i3c_controller { // 模板公共参数,继承该模板的节点如果使用模板中的默认值,则节点字段可以缺省。
- busId = 0; // 【必要】i3c总线号
- busMode = 0x0; // 总线模式,0x0:纯净;0x1:混合高速;0x2:混合受限;0x3:混合低速。
- regBasePhy = 0x120b0000; // 【必要】物理基地址
- regSize = 0xd1; // 【必要】寄存器位宽
- IrqNum = 20; // 【必要】中断号
- i3cMaxRate = 12900000; // 【可选】i3c模式最大时钟速率
- i3cRate = 12500000; // 【可选】i3c模式时钟速率
- i2cFmRate = 1000000; // 【可选】i2c FM模式时钟速率
- i2cFmPlusRate = 400000; // 【可选】i2c FM+模式时钟速率
- }
- controller_0 :: i3c_controller {
- busId = 18;
- IrqNum = 20;
- }
- }
- }
- }
需要注意的是,新增i3c_config.hcs配置文件后,必须在对应的hdf.hcs文件中包含i3c_config.hcs所在路径信息,否则配置文件无法生效。
-
-
实例化I3C控制器对象
配置属性文件完成后,要以核心层I3cCntlr对象的初始化为核心,包括驱动适配者自定义结构体(传递参数和数据),实例化I3cCntlr成员I3cMethod(让用户可以通过接口来调用驱动底层函数)。
此步骤需要通过实现HdfDriverEntry成员函数(Bind,Init,Release)来完成。
I3cCntlr成员钩子函数结构体I3cMethod的实例化,I3cLockMethod钩子函数结构体本例未实现,若要实例化,可参考I2C驱动开发。
-
自定义结构体参考
说明:
从驱动的角度看,自定义结构体是参数和数据的载体,而且i3c_config.hcs文件中的数值会被HDF读入并通过DeviceResourceIface来初始化结构体成员,其中一些重要数值也会传递给核心层I3cCntlr对象,例如设备号、总线号等。- struct VirtualI3cCntlr {
- struct I3cCntlr cntlr; // 【必要】是核心层控制对象,具体描述见下面。
- volatile unsigned char *regBase; // 【必要】寄存器基地址
- uint32_t regBasePhy; // 【必要】寄存器物理基地址
- uint32_t regSize; // 【必要】寄存器位宽
- uint16_t busId; // 【必要】设备号
- uint16_t busMode;
- uint16_t IrqNum;
- uint32_t i3cMaxRate;
- uint32_t i3cRate;
- uint32_t i2cFmRate;
- uint32_t i2cFmPlusRate;
- };
- // I3cCntlr是核心层控制器结构体,其中的成员在Init函数中被赋值。
- struct I3cCntlr {
- OsalSpinlock lock;
- void *owner;
- int16_t busId;
- struct I3cConfig config;
- uint16_t addrSlot[(I3C_ADDR_MAX + 1) / ADDRS_PER_UINT16];
- struct I3cIbiInfo *ibiSlot[I3C_IBI_MAX];
- const struct I3cMethod *ops;
- const struct I3cLockMethod *lockOps;
- void *priv;
- };
-
Init函数开发参考
入参:
HdfDeviceObject是整个驱动对外提供的接口参数,具备HCS配置文件的信息。
返回值:
HDF_STATUS相关状态(表3为部分展示,如需使用其他状态,可参考//drivers/hdf_core/interfaces/inner_api/utils/hdf_base.h中HDF_STATUS定义)。
表 3 HDF_STATUS相关状态说明
状态(值) 问题描述 HDF_ERR_INVALID_OBJECT 控制器对象非法 HDF_ERR_INVALID_PARAM 参数非法 HDF_ERR_MALLOC_FAIL 内存分配失败 HDF_ERR_IO I/O错误 HDF_SUCCESS 传输成功 HDF_FAILURE 传输失败 函数说明:
初始化自定义结构体对象,初始化I3cCntlr成员,调用核心层I3cCntlrAdd函数。
- static int32_t VirtualI3cParseAndInit(struct HdfDeviceObject *device, const struct DeviceResourceNode *node)
- {
- int32_t ret;
- struct VirtualI3cCntlr *virtual = NULL; // 【必要】自定义结构体对象
- (void)device;
- virtual = (struct VirtualI3cCntlr *)OsalMemCalloc(sizeof(*virtual)); // 【必要】内存分配
- if (virtual == NULL) {
- HDF_LOGE("%s: Malloc virtual fail!", __func__);
- return HDF_ERR_MALLOC_FAIL;
- }
- ret = VirtualI3cReadDrs(virtual, node); // 【必要】将i3c_config文件的默认值填充到结构体中,函数定义见下方
- if (ret != HDF_SUCCESS) {
- HDF_LOGE("%s: Read drs fail! ret:%d", __func__, ret);
- goto __ERR__;
- }
- ......
- virtual->regBase = OsalIoRemap(virtual->regBasePhy, virtual->regSize); // 【必要】地址映射
- ret = OsalRegisterIrq(hi35xx->softIrqNum, OSAL_IRQF_TRIGGER_NONE, I3cIbiHandle, "I3C", virtual); //【必要】注册中断程序
- if (ret != HDF_SUCCESS) {
- HDF_LOGE("%s: register irq failed!", __func__);
- return ret;
- }
- ......
- VirtualI3cCntlrInit(virtual); // 【必要】I3C设备的初始化
- virtual->cntlr.priv = (void *)node; // 【必要】存储设备属性
- virtual->cntlr.busId = virtual->busId; // 【必要】初始化I3cCntlr成员
- virtual->cntlr.ops = &g_method; // 【必要】I3cMethod的实例化对象的挂载
- (void)OsalSpinInit(&virtual->spin);
- ret = I3cCntlrAdd(&virtual->cntlr); // 【必要且重要】调用此函数将控制器添加至核心,返回成功信号后驱动才完全接入平台核心层。
- if (ret != HDF_SUCCESS) {
- HDF_LOGE("%s: add i3c controller failed! ret = %d", __func__, ret);
- (void)OsalSpinDestroy(&virtual->spin);
- goto __ERR__;
- }
- return HDF_SUCCESS;
- __ERR__: // 若控制器添加失败,需要执行去初始化相关函数。
- if (virtual != NULL) {
- OsalMemFree(virtual);
- virtual = NULL;
- }
- return ret;
- }
- static int32_t VirtualI3cInit(struct HdfDeviceObject *device)
- {
- int32_t ret;
- const struct DeviceResourceNode *childNode = NULL;
- if (device == NULL || device->property == NULL) {
- HDF_LOGE("%s: device or property is NULL", __func__);
- return HDF_ERR_INVALID_OBJECT;
- }
- DEV_RES_NODE_FOR_EACH_CHILD_NODE(device->property, childNode) {
- ret = VirtualI3cParseAndInit(device, childNode);
- if (ret != HDF_SUCCESS) {
- break;
- }
- }
- return ret;
- }
- static int32_t VirtualI3cReadDrs(struct VirtualI3cCntlr *virtual, const struct DeviceResourceNode *node)
- {
- struct DeviceResourceIface *drsOps = NULL;
- // 获取drsOps方法
- drsOps = DeviceResourceGetIfaceInstance(HDF_CONFIG_SOURCE);
- if (drsOps == NULL || drsOps->GetUint32 == NULL || drsOps->GetUint16 == NULL) {
- HDF_LOGE("%s: Invalid drs ops fail!", __func__);
- return HDF_FAILURE;
- }
- // 将配置参数依次读出,并填充至结构体中
- if (drsOps->GetUint16(node, "busId", &virtual->busId, 0) != HDF_SUCCESS) {
- HDF_LOGE("%s: Read busId fail!", __func__);
- return HDF_ERR_IO;
- }
- if (drsOps->GetUint16(node, "busMode", &virtual->busMode, 0) != HDF_SUCCESS) {
- HDF_LOGE("%s: Read busMode fail!", __func__);
- return HDF_ERR_IO;
- }
- if (drsOps->GetUint16(node, "IrqNum", &virtual->IrqNum, 0) != HDF_SUCCESS) {
- HDF_LOGE("%s: Read IrqNum fail!", __func__);
- return HDF_ERR_IO;
- }
- ......
- return HDF_SUCCESS;
- }
-
Release函数开发参考
入参:
HdfDeviceObject是整个驱动对外提供的接口参数,具备HCS配置文件的信息。
返回值:
无。
函数说明:
释放内存和删除控制器,该函数需要在驱动入口结构体中赋值给Release接口,当HDF框架调用Init函数初始化驱动失败时,可以调用Release释放驱动资源。
说明:
所有强制转换获取相应对象的操作前提是在Init函数中具备对应赋值的操作。- static void VirtualI3cRemoveByNode(const struct DeviceResourceNode *node)
- {
- int32_t ret;
- int16_t busId;
- struct I3cCntlr *cntlr = NULL;
- struct VirtualI3cCntlr *virtual = NULL;
- struct DeviceResourceIface *drsOps = NULL;
- drsOps = DeviceResourceGetIfaceInstance(HDF_CONFIG_SOURCE);
- if (drsOps == NULL || drsOps->GetUint32 == NULL) {
- HDF_LOGE("%s: invalid drs ops fail!", __func__);
- return;
- }
- ret = drsOps->GetUint16(node, "busId", (uint16_t *)&busId, 0);
- if (ret != HDF_SUCCESS) {
- HDF_LOGE("%s: read busId fail!", __func__);
- return;
- }
- ......
- // 可以调用I3cCntlrGet函数通过设备的cntlrNum获取I3cCntlr对象,以及调用I3cCntlrRemove函数来释放I3cCntlr对象的内容。
- cntlr = I3cCntlrGet(busId);
- if (cntlr != NULL && cntlr->priv == node) {
- I3cCntlrPut(cntlr);
- I3cCntlrRemove(cntlr); // 【必要】主要是从管理器驱动那边移除I3cCntlr对象
- virtual = (struct VirtualI3cCntlr *)cntlr; // 【必要】通过强制转换获取自定义的对象并进行release操作
- (void)OsalSpinDestroy(&virtual->spin);
- OsalMemFree(virtual);
- }
- return;
- }
- static void VirtualI3cRelease(struct HdfDeviceObject *device)
- {
- const struct DeviceResourceNode *childNode = NULL;
- HDF_LOGI("%s: enter", __func__);
- if (device == NULL || device->property == NULL) {
- HDF_LOGE("%s: device or property is NULL", __func__);
- return;
- }
- ......
- // 遍历、解析i3c_config.hcs中的所有配置节点,并分别进行release操作
- DEV_RES_NODE_FOR_EACH_CHILD_NODE(device->property, childNode) {
- VirtualI3cRemoveByNode(childNode); //函数定义如上
- }
- }
-
-
注册中断处理子程序
在中断处理程序中通过判断中断产生的地址,实现热接入、IBI等操作。
- static int32_t VirtualI3cReservedAddrWorker(struct VirtualI3cCntlr *virtual, uint16_t addr)
- {
- (void)virtual;
- switch (addr) {
- case I3C_HOT_JOIN_ADDR:
- VirtualI3cHotJoin(virtual);
- break;
- case I3C_RESERVED_ADDR_7H3E:
- case I3C_RESERVED_ADDR_7H5E:
- case I3C_RESERVED_ADDR_7H6E:
- case I3C_RESERVED_ADDR_7H76:
- case I3C_RESERVED_ADDR_7H7A:
- case I3C_RESERVED_ADDR_7H7C:
- case I3C_RESERVED_ADDR_7H7F:
- // 广播地址单比特错误的所有情形
- HDF_LOGW("%s: broadcast Address single bit error!", __func__);
- break;
- default:
- HDF_LOGD("%s: Reserved address which is not supported!", __func__);
- break;
- }
- return HDF_SUCCESS;
- }
- static int32_t I3cIbiHandle(uint32_t irq, void *data)
- {
- struct VirtualI3cCntlr *virtual = NULL;
- struct I3cDevice *device = NULL;
- uint16_t ibiAddr;
- char *testStr = "Hello I3C!";
- (void)irq;
- if (data == NULL) {
- HDF_LOGW("%s: data is NULL!", __func__);
- return HDF_ERR_INVALID_PARAM;
- }
- virtual = (struct VirtualI3cCntlr *)data;
- // 【必要】获取产生中断的地址,使用CHECK_RESERVED_ADDR宏判断该地址是否为I3C保留地址。
- ibiAddr = VirtualI3cGetIbiAddr();
- if (CHECK_RESERVED_ADDR(ibiAddr) == I3C_ADDR_RESERVED) {
- HDF_LOGD("%s: Calling VirtualI3cResAddrWorker...", __func__);
- return VirtualI3cReservedAddrWorker(virtual, ibiAddr);
- } else {
- HDF_LOGD("%s: Calling I3cCntlrIbiCallback...", __func__);
- device = GetDeviceByAddr(&virtual->cntlr, ibiAddr);
- if (device == NULL) {
- HDF_LOGE("func:%s device is NULL!",__func__);
- return HDF_ERR_MALLOC_FAIL;
- }
- if (device->ibi->payload > VIRTUAL_I3C_TEST_STR_LEN) {
- // 将字符串"Hello I3C!"放入IBI缓冲区内
- *device->ibi->data = *testStr;
- }
- // 根据产生IBI的I3C设备调用IBI回调函数
- return I3cCntlrIbiCallback(device);
- }
- return HDF_SUCCESS;
- }
-
驱动调试
【可选】针对新增驱动程序,建议验证驱动基本功能,例如挂载后的测试用例是否成功,数据能否传输等。
最后
有很多小伙伴不知道学习哪些鸿蒙开发技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?而且学习时频繁踩坑,最终浪费大量时间。所以有一份实用的鸿蒙(HarmonyOS NEXT)资料用来跟着学习是非常有必要的。
这份鸿蒙(HarmonyOS NEXT)资料包含了鸿蒙开发必掌握的核心知识要点,内容包含了(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、音频、视频、WebGL、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、Harmony南向开发、鸿蒙项目实战等等)鸿蒙(HarmonyOS NEXT)技术知识点。
希望这一份鸿蒙学习资料能够给大家带来帮助,有需要的小伙伴自行领取,限时开源,先到先得~无套路领取!!
获取这份完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
鸿蒙(HarmonyOS NEXT)最新学习路线
-
HarmonOS基础技能
- HarmonOS就业必备技能
- HarmonOS多媒体技术
- 鸿蒙NaPi组件进阶
- HarmonOS高级技能

- 初识HarmonOS内核
- 实战就业级设备开发
有了路线图,怎么能没有学习资料呢,小编也准备了一份联合鸿蒙官方发布笔记整理收纳的一套系统性的鸿蒙(OpenHarmony )学习手册(共计1236页)与鸿蒙(OpenHarmony )开发入门教学视频,内容包含:ArkTS、ArkUI、Web开发、应用模型、资源分类…等知识点。
获取以上完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
《鸿蒙 (OpenHarmony)开发入门教学视频》
《鸿蒙生态应用开发V2.0白皮书》
《鸿蒙 (OpenHarmony)开发基础到实战手册》
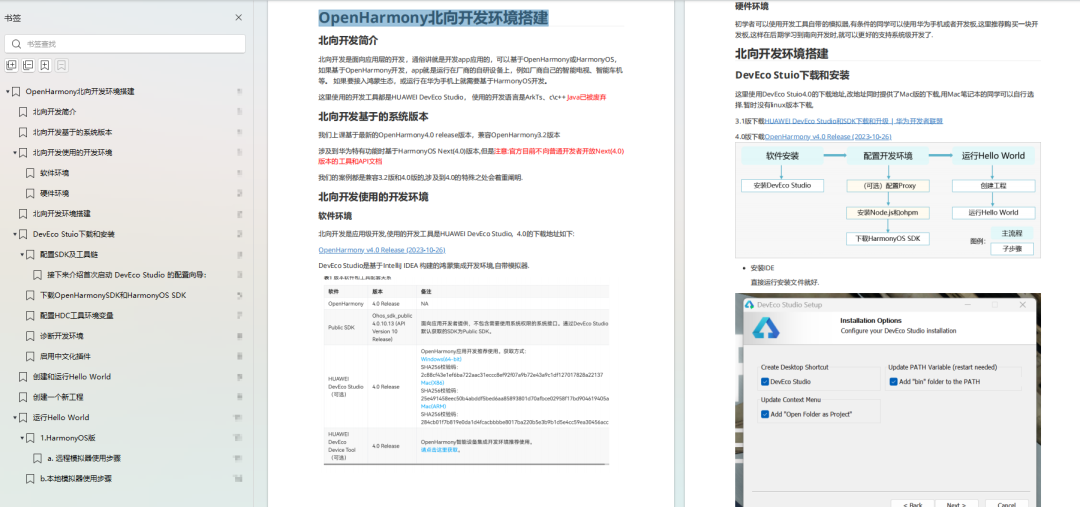
OpenHarmony北向、南向开发环境搭建
《鸿蒙开发基础》
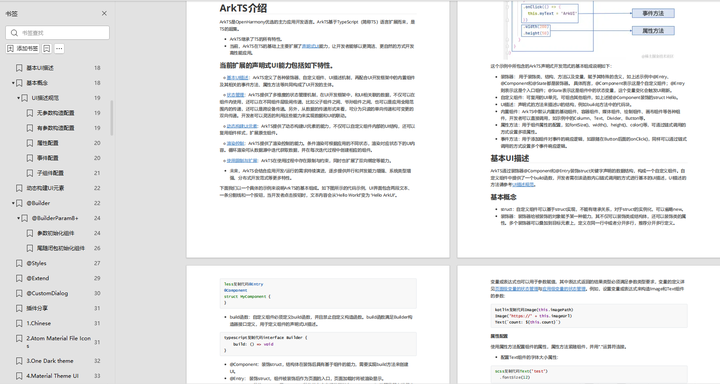
- ArkTS语言
- 安装DevEco Studio
- 运用你的第一个ArkTS应用
- ArkUI声明式UI开发
- .……
《鸿蒙开发进阶》
- Stage模型入门
- 网络管理
- 数据管理
- 电话服务
- 分布式应用开发
- 通知与窗口管理
- 多媒体技术
- 安全技能
- 任务管理
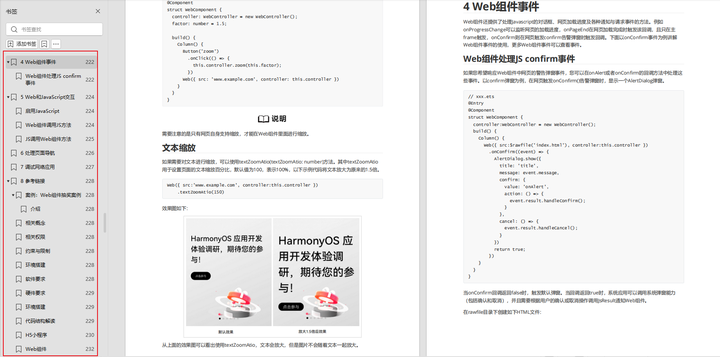
- WebGL
- 国际化开发
- 应用测试
- DFX面向未来设计
- 鸿蒙系统移植和裁剪定制
- ……
《鸿蒙进阶实战》
- ArkTS实践
- UIAbility应用
- 网络案例
- ……
获取以上完整鸿蒙HarmonyOS学习资料,请点击→纯血版全套鸿蒙HarmonyOS学习资料
总结
总的来说,华为鸿蒙不再兼容安卓,对中年程序员来说是一个挑战,也是一个机会。只有积极应对变化,不断学习和提升自己,他们才能在这个变革的时代中立于不败之地。


