- 1kafka java api示例_kafka生产者和消费者的javaAPI的示例代码
- 2彻底弄懂ES6中的Map和Set
- 3论文浅尝 | 基于表示学习的大规模知识库规则挖掘
- 4监控MySQL的工具_mysql enterprise monitor
- 5Redis面试题24道
- 6ModuleNotFoundError: No module named ‘mysql‘解决方案_modulenotfounderror: no module named 'mysql
- 7Linux Mysql表名默认区分大小写【已解决】_mysql-5.7.18 linux版本的配置文件区分大小写
- 8正排索引 vs 倒排索引 - 搜索引擎具体原理_正排索引和倒排索引
- 9MAC OS X 系统镜像各版本下载_macos下载
- 10git 下载特定分支_git 下载分支
【数据结构7-1-查找-线性-二分法-二叉树-哈希表】
赞
踩
常用的查找及代码程序
1 查找基本概念
查找是在数据集合中寻找特定元素或满足特定条件的元素的过程。它是一种常见的数据操作。
2 线性表的查找
2.1 顺序查找
顺序查找(Sequential Search)的查找过程为:从表的一端开始,依次将记录的关键字和给定值进行比较,若某个记录的关键字和给定值相等,则查找成功;反之,若扫描整个表后,仍未找到关键字和给定值相等的记录,则查找失败。
顺序查找方法既适用于线性表的顺序存储结构,又适用千线性表的链式存储结构。下面只介绍以顺序表作为存储结构时实现的顺序查找算法。顺序查找比较简单,但是费时;效率低;
简单看一下下面两个算法的区别:arr【0】不用于存储数据;
// 顺序查找函数
int search(int arr[], int size, int key) {
// 从数组的最后一个元素开始查找
for (int i = size - 1; i >= 1; --i) {
if (arr[i] == key) {
return i;
}
}
// 未找到元素
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
改进后:不用每次都进行循环是否结束的查找,也就是i>=1?
// 顺序查找函数
int search(int arr[], int size, int key) {
// 设置监视哨
arr[0] = key;
// 从数组的最后一个元素开始查找
for (int i = size; arr[i]!=key; --i);
// 未找到元素
return i;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
2.2 二分法查找
它是一种效率较高的查找方法。但是,折半查找要求线性表必须采用顺序存储结构, 而且表中元素按关键字有序排列;
例如查找30的数据:( 5, 16, 20, 27, 3 0, 36, 44, 55, 60, 67, 71)
思考如果low=mid而不是low=mid+1后结果是什么?
需要注意的是,循环执行的条件是low< =high,而不是low<high,因为low=high时,查找区间还有最后一个结点, 还要进一步比较 。
// 二分法查找函数 int main() { int high, mid, low, t; int str[] = {5, 16, 20, 27, 30, 36, 44, 55, 60, 67, 71}; high = 10; low = 0; mid = (high + low) / 2; t = 71; while (low <= high){ mid = (high + low) / 2; if (str[mid] >= t){ if (str[mid] == t){ printf("YES\n"); return 0; } else{ high = mid; } } else{ low = mid + 1; // 思考如果low=mid后结果是什么?如果 // t=71,会在后面陷入死循环:high=10,low=9,mid=9;一直循环 } } return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
折半查找的优点是:比较次数少,查找效率高。其缺点是:对表结构要求高,只能用于顺序存储的有序表。查找前需要排序,而排序本身是一种费时的运算。同时为了保持顺序表的有序性,对有序表进行插入和删除时,平均比较和移动表中一半元素,这也是一种费时的运算。因此,折半查找不适用于数据元素经常变动的线性表。
2.3 分块查找
分块查找的优点是:在表中插入和删除数据元素时,只要找到该元素对应的块,就可以在该块内进行插入和删除运算。 由于块内是无序的,故插入和删除比较容易,无需进行大量移动。 如果线性表既要快速查找又经常动态变化,则可采用分块查找。
其缺点是:要增加一个索引表的存
储空间并对初始索引表进行排序运算。
其基本的思想和这里面差不多;如下图:

3 树表的查询
前面介绍的3 种查找方法都是用线性表作为查找表的组织形式,其中折半查找效率较高。但由千折半查找要求表中记录按关键字有序排列,且不能用链表做存储结构,因此,当表的插入或删除操作频繁时,为维护表的有序性,需要移动表中很多记录。这种由移动记录引起的额外时间开销,就会抵消折半查找的优点。 所以,线性表的查找更适用千静态查找表,若要对动态查找表进行高效率的查找,可采用几种特殊的二叉树作为查找表的组织形式,在此将它们统称为树表。 本节将介绍在这些树表上进行查找和修改操作的方法
3.1 二叉排序树
3.1.1 定义
二叉排序树或者是一棵空树,或者是具有下列性质的二叉树:二叉排序树,又称二叉查找树,它或者是一棵空树,或者是具有以下性质的二叉树:
- 若左子树不空,则左子树上所有节点的值均小于它的根节点的值;
- 若右子树不空,则右子树上所有节点的值均大于它的根节点的值;
左、右子树也分别为二叉排序树。
如下图所示:

若中序遍历图7.5(a), 则可得到一个按数值 大小排序的递增序列:
3, 12, 24, 37, 45, 53, 61, 78, 90, 100
3.1.2 二叉树的建立、遍历、查找、增加、删除:
若中序遍历图7.5(a), 则可得到一个按数值 大小排序的递增序列:具体详情可以参考我下面的这篇内容:主要是包括二叉排序树(建立、遍历、查找、增加、删除)并给出了详细的C运行代码;链接:
3.1.3 代码实现:
二叉排序树(建立、遍历、查找、增加、删除)并给出了详细的C运行代码;链接
3.2 平衡二叉树
二叉排序树查找算法的性能取决于二叉树的结构,而 二叉排序树的形状则取决于其数据集。如果数据呈有序排列,则二叉排序树是线性的,查找的时间复杂度为O(n); 反之,如果二叉排序树的结构合理,则查找速度较快,查找的时间复杂度为 O(lo2n)。事实上,树的高度越小,查找 g速度越快。因此,希望二叉树的高度尽可能小。本节将讨论一种特殊类型的二叉排序树,称为平衡二叉树 (Balance d Binary Tree或Height-Balanced·Tree), 因由前苏联数学家Adelson-Velskii和Land i s提出,所以又称AVL树。
平衡二叉树或者是空树,或者是具有如下特征的二叉排序树:
- (1 )
左子树和右子树的深度之差的绝对值不超过1; - (2)
左子树和右子树也是平衡二叉树。
3.2.1 平横因子
平衡因子=左子树高度-右子树高度:如下图所示:


3.2.2 不平横树的调整-左旋
在旋转过程中,冲突的是9的左孩6,这里记一句话左旋--冲突左孩变右孩;如下图左旋过程

而且旋转过后,中序遍历的话,两者是等价的,但是树的高度却变低了;如下图:

3.2.3 不平横树的调整-右旋
在旋转过程中,冲突的是14的左孩9,这里记一句话右旋--冲突右孩变左孩;如下图左旋过程

而且旋转过后,中序遍历的话,两者是等价的,但是树的高度却变低了;如下图:

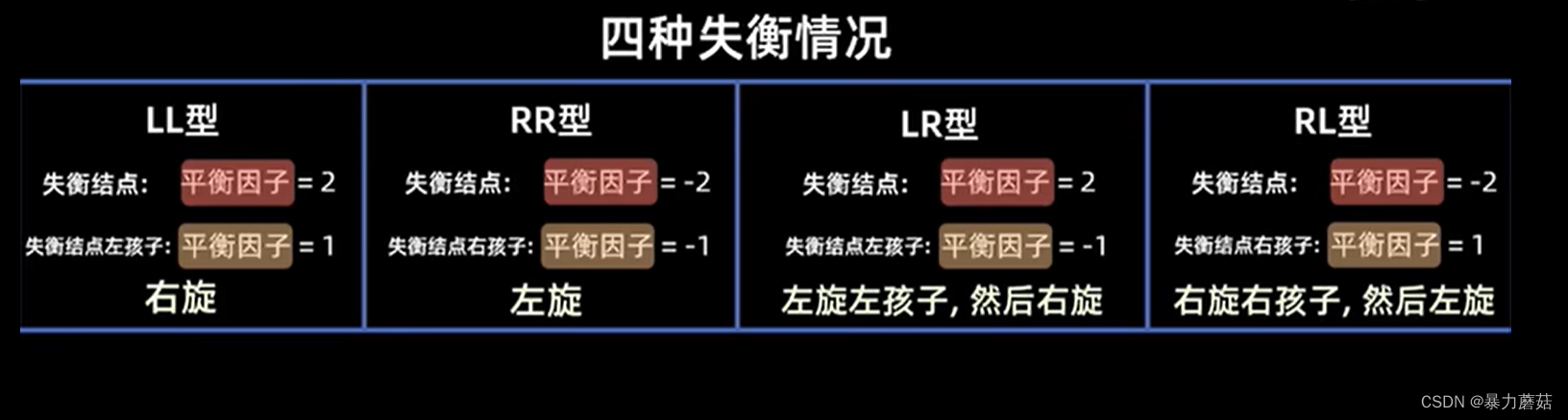
3.2.4 当插入节点出现失衡因子如何旋转
调整方法是:找到离插入结点最近且平衡因子绝对值超过1的祖先结点, 以该结点为根的子树称为最小不平衡子树, 可将重新平衡的范围局限于这棵子树,如下图所示,一共四种情况:
巧记一下:LL是右旋,RR是左旋,也就是纯的则相反旋转:L(left),R(right)
巧记一下:LR是右旋,先左后右,RL,先右后左,也就是混的按照字母:L(left),R(right)
3.2.4 某位UP主的详细视频讲解
关于平衡二叉树的详细信息,这个视频讲的异常清晰:链接
3.3 B-树
前面介绍的查找方法均适用千存储在计算机内存中较小的文件,统称为内查找法。若文件很大且存放于外存进行查找时,这些查找方法就不适用了。内查找法都以结点为单位进行查找,这样需要反复地进行内、外存的交换,是很费时的。1970年,R.Bayer和£.Mccreight提出了一种适用于外查找的平衡多叉树-B-树,磁盘管理系统中的目录管理,以及数据库系统中的索引组织多数都采用B-树这种数据结构。
B树就是一个有序的多路查询树
3.3.1 B-树的定义
- 对于m叉树,每个节点最多有m个孩子,其中最多有m-1个关键字;(人5个手指最多4条缝)
- 每个节点的内容如下:例如对于四叉树,3个关键字,即其存储结构:
| n:多少关键字 | P0指针 | k1关键字 | P1指针 | k2关键字 | P2指针 | k3关键字 | P3指针 |
|---|
- 每个节点的内容如下:例如对于四叉树,3个关键字,即其存储结构:
谨记m阶子树,最多有m-1个关键字,而对于每个节点最少要有[m/2]-1个关键字,其中[m/2]是向上取整;关键字就是把内容进行了分块,如同索引,例如:2--- 5,两个关键字就分量三个区域,0-2,2-5,5--三个范围,也就是对于四叉树,最多是3个关键字;
3.3.2 题目练习
真题练习:


3.3.3 B-树的查找、插入、删除
代码实现——C:链接
/* * @Author: Xyh4ng * @Date: 2023-01-02 20:24:30 * @LastEditors: Xyh4ng * @LastEditTime: 2023-01-05 20:17:06 * @Description: * Copyright (c) 2023 by Xyh4ng 503177404@qq.com, All Rights Reserved. */ #include <stdio.h> #include <stdlib.h> #define M 3 // B树的阶 #define MIN_KEYNUM (M + 1) / 2 - 1 typedef struct BTreeNode { int keyNum; // 结点中关键字的数量 struct BTreeNode *parent; // 指向双亲结点 struct Node // 存放关键字以及其孩子节点指针,正常结点最多存放m个孩子,但在插入判断时会多存放一个 { int key; struct BTreeNode *ptr; } node[M + 1]; // key的0号单元未使用 } BTreeNode, *BTree; typedef struct Result { int tag; // 查找成功的标志 BTreeNode *pt; // 指向查找到的结点 int i; // 结点在关键字中的序号 } Result; int Search(BTree T, int K) { int i = 0; for (int j = 1; j <= T->keyNum; j++) { if (T->node[j].key <= K) { i = j; } } return i; } /* 在m阶B树T上查找关键字K,返回结果(pt,i,tag)。若查找成功,则特征值tag=1,指针pt所指结点中第i个关键字等于K;否则特征值tag=0,等于K的关键字应插入在指针Pt所指结点中第i和第i+1个关键字之间。 */ Result SearchBTree(BTree T, int K) { BTree p = T, q = NULL; /* 初始化,p指向待查结点,q指向p的双亲 */ int found = 0; int index = 0; Result r; while (p && !found) { index = Search(p, K); // p->node[index].key ≤ K < p->node[index+1].key if (index > 0 && p->node[index].key == K) found = 1; else { q = p; p = p->node[index].ptr; } } r.i = index; if (found) // 查找成功 { r.tag = 1; r.pt = p; } else { r.tag = 0; r.pt = q; } return r; } void Insert(BTree *q, int key, BTree ap, int i) { for (int j = (*q)->keyNum; j > i; j--) // 空出(*q)->node[i+1] { (*q)->node[j + 1] = (*q)->node[j]; } (*q)->node[i + 1].key = key; (*q)->node[i + 1].ptr = ap; (*q)->keyNum++; } // 将结点q分裂成两个结点,mid之前的结点保留,mid之后结点移入新生结点ap void Split(BTree *q, BTree *ap) { int mid = (M + 1) / 2; *ap = (BTree)malloc(sizeof(BTreeNode)); (*ap)->node[0].ptr = (*q)->node[mid].ptr; if ((*ap)->node[0].ptr) { (*ap)->node[0].ptr->parent = *ap; } for (int i = mid + 1; i <= M; i++) { (*ap)->node[i - mid] = (*q)->node[i]; if ((*ap)->node[i - mid].ptr) { (*ap)->node[i - mid].ptr->parent = *ap; } } (*ap)->keyNum = M - mid; (*ap)->parent = (*q)->parent; (*q)->keyNum = mid - 1; } // 生成含信息(T,r,ap)的新的根结点&T,原T和ap为子树指针 void NewRoot(BTree *T, int key, BTree ap) { BTree p; p = (BTree)malloc(sizeof(BTreeNode)); p->node[0].ptr = *T; // 根结点孩子数最小为2,则将T作为左孩子,ap作为右孩子 *T = p; if ((*T)->node[0].ptr) { (*T)->node[0].ptr->parent = *T; } (*T)->parent = NULL; (*T)->keyNum = 1; (*T)->node[1].key = key; (*T)->node[1].ptr = ap; if ((*T)->node[1].ptr) { (*T)->node[1].ptr->parent = *T; } } /* 在m阶B树T上结点*q的key[i]与key[i+1]之间插入关键字K的指针r。若引起结点过大,则沿双亲链进行必要的结点分裂调整,使T仍是m阶B树。 */ void InseartBTree(BTree *T, int key, BTree q, int i) { BTree ap = NULL; int finished = 0; int rx = key; // 需要插入的关键字的值 int mid; while (q && !finished) { Insert(&q, rx, ap, i); if (q->keyNum < M) finished = 1; else // 结点关键字数超出规定 { int mid = (M + 1) / 2; // 结点的中间关键字序号 rx = q->node[mid].key; Split(&q, &ap); // 将q->key[mid+1..M],q->ptr[mid..M]移入新结点*ap q = q->parent; if (q) i = Search(q, rx); } } if (!finished) { NewRoot(T, rx, ap); } } void Delete(BTree *q, int index) { for (int i = index; i <= (*q)->keyNum; i++) { (*q)->node[index] = (*q)->node[index + 1]; } (*q)->keyNum--; } void LeftRotation(BTree *q, BTree *p, int i) { // 将父亲结点转移至q结点的末尾 (*q)->keyNum++; (*q)->node[(*q)->keyNum].key = (*p)->node[i + 1].key; // 将q结点的右兄弟的第一个关键字转移至父亲结点的分隔符位置 BTree rightBroPtr = (*p)->node[i + 1].ptr; (*p)->node[i + 1].key = rightBroPtr->node[1].key; // 将右结点的关键字前移 for (int j = 1; j < rightBroPtr->keyNum; j++) { rightBroPtr->node[j] = rightBroPtr->node[j + 1]; } rightBroPtr->keyNum--; } void RightRotation(BTree *q, BTree *p, int i) { // 将q结点向后移动空出第一个关键字的位置 for (int j = (*q)->keyNum; j >= 1; j--) { (*q)->node[j + 1] = (*q)->node[j]; } // 将父亲结点移动至q结点的第一个关键字的位置 (*q)->node[1].key = (*p)->node[i].key; (*q)->node[1].ptr = NULL; (*q)->keyNum++; // 将左兄弟结点的最后一个关键字移动至父亲结点的分隔符位置 BTree leftBroPtr = (*p)->node[i - 1].ptr; (*p)->node[i].key = leftBroPtr->node[leftBroPtr->keyNum].key; leftBroPtr->keyNum--; } void BalanceCheck(BTree *q, int key); void MergeNode(BTree *q, BTree *p, int i) { BTree rightBroPtr = NULL, leftBroPtr = NULL; if (i + 1 <= (*p)->keyNum) { rightBroPtr = (*p)->node[i + 1].ptr; } if (i - 1 >= 0) { leftBroPtr = (*p)->node[i - 1].ptr; } if (rightBroPtr) { // 将父亲结点的分隔符移动至q结点的最后 (*q)->keyNum++; (*q)->node[(*q)->keyNum].key = (*p)->node[i + 1].key; // 将右兄弟结点都移动到q结点上 (*q)->node[(*q)->keyNum].ptr = rightBroPtr->node[0].ptr; for (int j = 1; j <= rightBroPtr->keyNum; j++) { (*q)->keyNum++; (*q)->node[(*q)->keyNum] = rightBroPtr->node[j]; } // 将父亲结点的分隔符删除 int key = (*p)->node[i + 1].key; for (int j = i + 1; j < (*p)->keyNum; j++) { (*p)->node[j] = (*p)->node[j + 1]; } (*p)->keyNum--; if (!(*p)->parent && !(*p)->keyNum) { // 判断父亲结点是否为根结点,且关键字为空 // 让q结点作为根结点 (*q)->parent = NULL; (*p) = (*q); } BalanceCheck(p, key); } else if (leftBroPtr) { // 将父亲结点的分隔符移动至左兄弟结点的最后 leftBroPtr->keyNum++; leftBroPtr->node[leftBroPtr->keyNum].key = (*p)->node[i].key; // 将q结点都移动到左兄弟结点上 leftBroPtr->node[leftBroPtr->keyNum].ptr = (*q)->node[0].ptr; for (int j = 1; j <= (*q)->keyNum; j++) { leftBroPtr->keyNum++; leftBroPtr->node[leftBroPtr->keyNum] = (*q)->node[j]; } // 将父亲结点的分隔符删除 int key = (*p)->node[i].key; for (int j = i; j < (*p)->keyNum; j++) { (*p)->node[j] = (*p)->node[j + 1]; } (*p)->keyNum--; if (!(*p)->parent && !(*p)->keyNum) { // 判断父亲结点是否为根结点,且关键字为空 // 让q结点作为根结点 (*q)->parent = NULL; (*p) = (*q); } BalanceCheck(p, key); } } void BalanceCheck(BTree *q, int key) { if ((*q)->keyNum < MIN_KEYNUM) // 该结点不满足最小关键字数目要求 { BTree p = (*q)->parent; int i = Search(p, key); // 找到q结点在父亲结点中的索引 if (i + 1 <= p->keyNum && p->node[i + 1].ptr->keyNum > MIN_KEYNUM) // 看q结点的右兄弟是否存在多余结点 { LeftRotation(q, &p, i); } else if (i - 1 >= 0 && p->node[i - 1].ptr->keyNum > MIN_KEYNUM) // 看q结点的左兄弟是否存在多余结点 { RightRotation(q, &p, i); } else // q结点的左右兄弟都不存在多余结点 { // 将q结点和其左右兄弟的其中一个以及父亲结点中的分隔符合并 MergeNode(q, &p, i); } } } void MergeBro(BTree *left, BTree *right) { if (!(*left)->node[((*left)->keyNum)].ptr) { // 如果左子树为叶子结点 (*left)->node[(*left)->keyNum].ptr = (*right)->node[0].ptr; for (int j = 1; j <= (*right)->keyNum; j++) { (*left)->keyNum++; (*left)->node[(*left)->keyNum] = (*right)->node[j]; } } else { // 左子树不是叶子结点,则先将左子树最后一个子结点和右子树第一个子结点合并 MergeBro(&(*left)->node[(*left)->keyNum].ptr, &(*right)->node[0].ptr); for (int j = 1; j <= (*right)->keyNum; j++) { (*left)->keyNum++; (*left)->node[(*left)->keyNum] = (*right)->node[j]; } } // 合并完对左子树关键字数目进行判断 if ((*left)->keyNum >= M) { int mid = (M + 1) / 2; // 结点的中间关键字序号 int rx = (*left)->node[mid].key; BTree ap = NULL; Split(&(*left), &ap); // 将q->key[mid+1..M],q->ptr[mid..M]移入新结点*ap BTree p = (*left)->parent; int i = Search(p, rx); Insert(&p, rx, ap, i); } } void DeleteBTreeNode(BTree *T, int key) { Result res = SearchBTree(*T, key); if (res.tag) // 查找成功 { // 判断该结点是否是叶子结点 if (!res.pt->node[res.i].ptr) { // 若是叶子结点,则直接删除,然后对该结点进行平衡判断 Delete(&res.pt, res.i); BalanceCheck(&res.pt, key); } else { // 若不是叶子节点 BTree leftChildPtr = res.pt->node[res.i - 1].ptr; BTree rightChildPtr = res.pt->node[res.i].ptr; if (leftChildPtr->keyNum > MIN_KEYNUM) // 左子树富有,则将左子树中提取最大值放到该结点中替换要删除的关键字 { res.pt->node[res.i].key = leftChildPtr->node[leftChildPtr->keyNum].key; leftChildPtr->keyNum--; } else if (rightChildPtr->keyNum > MIN_KEYNUM) // 右子树富有,则将右子树中提取最小值放到该结点中替换要删除的关键字 { res.pt->node[res.i].key = rightChildPtr->node[1].key; for (int j = 1; j < rightChildPtr->keyNum; j++) { rightChildPtr->node[j] = rightChildPtr->node[j + 1]; } rightChildPtr->keyNum--; } else // 左右子树都不富有,则合并左右子树 { MergeBro(&leftChildPtr, &rightChildPtr); // 删除结点的关键字 res.i = Search(res.pt, key); // 合并结点可能会改变结点中关键字的次序,重新查序 for (int j = res.i; j < res.pt->keyNum; j++) { res.pt->node[j] = res.pt->node[j + 1]; } res.pt->keyNum--; // 对结点进行平衡判断 BalanceCheck(&res.pt, key); } } } else // 查找失败 { printf("您删除的元素不存在"); } } int main() { int r[16] = {22, 16, 41, 58, 8, 11, 12, 16, 17, 9, 23, 13, 52, 58, 59, 61}; BTree T = NULL; Result s; int i; for (int i = 0; i < 16; i++) { s = SearchBTree(T, r[i]); if (!s.tag) InseartBTree(&T, r[i], s.pt, s.i); } while (1) { printf("\n请输入要删除的关键字: "); scanf("%d", &i); DeleteBTreeNode(&T, i); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
3.4 B+树
B+ 树是一种 B-树的变形树,更适合用于文件索引系统。严格来讲,它已不符合第 5 章中定
义的树了。这里仅进行概念的了解,详细信息可后序用到在进行熟悉。
4 散列表查找(哈希表查找)
前面讨论了基于线性表、树表结构的查找方法,这类查找方法都是以关键字的比较为基础的。散
列查找法(哈希查找) 的思想,它通过对元素的关键字值进行某种运算,直接求出元素的地址, 即使用关键字到地址的直接转换方法,而不需要反复比较。因此,散列查找法又叫杂凑法或散列法。
4.1 基本术语和概念
- 散列函数和地址:用于计算数据元素的哈希值。在记录的存储位置p和其关键字key 之间建立一个确定的对应关系H, 使 p=H( key ), 称这个对应关系H为散列函数,p为散列地址
- 散列表:存储数据元素的结构。一个有限连续的地址空间,用以存储按散列函数计算得到相应散列地址的数据记录。通常散列表的存储空间是一个一维数组,散列地址是数组的下标。
- 冲突和同义词:不同数据元素计算出的哈希值相同的情况。,那么这相同的哈希值就是同义词;
- 解决冲突的方法:如开放定址法、链地址法等。
4.2 散列函数的构造
常用的方法分类:
- 数字分析法
- 平方取中法
- 折叠法
- 除留余数法,如下图:

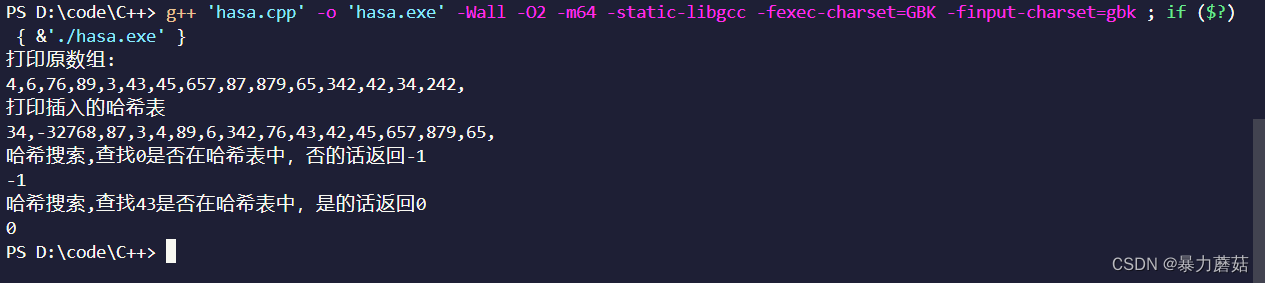
4.3 哈希表的创建,插入,查找
4.3.1 程序实现
这里哈希函数采用除留余数法,解决冲突的方法采用开放定址线性探测法.
这里如果中文输出乱码可以参考下列文章. 链接:
#include <iostream> #include <stdio.h> #include <stdlib.h> #include <string.h> #define HASIZE 17 // 哈希表进行初始化时要保证其初始值不为要查询的值, // 下面的值就是进行初始化的表值,一般不会重复 #define NULLKEY -32768 typedef struct hashtable { int *key; int count; // 当前元素的个数 } HashTable; // 哈希表的初始化 int InitHashtable(HashTable *H) { H->count = HASIZE; H->key = (int *)malloc(sizeof(int) * HASIZE); if (!H->key) { return -1; // 空间分配失败 } // 初始化 for (int i = 0; i < HASIZE; i++) { (H->key)[i] = NULLKEY; } return 0; // 返回0代表初始化成功 } // 使用除余留数法 int Hash(int key) { return key % HASIZE; } // 插入函数 void HashInsert(HashTable *H, int key) { // 先定义一个地址 int addr; addr = Hash(key); // 第一种情况就是一次插入就完成,也就是o(1) // 第二种情况就是有了冲突,也就是第一次取的 // 模不为初始值,这时候就要进行,开放地址线性探测法 // 这两种相同点就是最后都要把key值插入表中,因此可以稍微合并一下,对下面的代码进行改进 // if ((H->key)[addr] == NULLKEY) // { // (H->key)[addr] = key; // } // else // { // while ((H->key)[addr] != NULLKEY) // { // // addr = Hash(addr+1);//或者 // addr = (addr + 1) % HASIZE; // } // // 循环结束的条件是找到了空位,进行插入 // (H->key)[addr] = key; // } // 改进代码情况 while ((H->key)[addr] != NULLKEY) { // addr = Hash(addr+1);//或者 addr = (addr + 1) % HASIZE; } // 循环结束的条件是找到了空位,进行插入 (H->key)[addr] = key; } // 搜索函数,传入一个地址,如果找到的话就让这个地址指向数据 int HashSerach(HashTable H, int key, int *addr) { *addr = Hash(key); while (H.key[*addr] != key) { // 有两种情况是没有找到 // 第一就是遇到了NULLKEY,第二种就是循环到了自己本身 *addr = (*addr + 1) % HASIZE; if (H.key[*addr] == NULLKEY || H.key[*addr] == key) { // 返回-1代表查询失败 return -1; } } // 返回0代表查询成功,并且addr指针指向目标数据 return 0; } int main() { int arr[15] = {4, 6, 76, 89, 3, 43, 45, 657, 87, 879, 65, 342, 42, 34, 242}; HashTable H; int *adrr = NULL; int j; int i; adrr = &j; InitHashtable(&H); printf("打印原数组:\n"); for (int i = 0; i < 15; i++) { printf("%d,", arr[i]); HashInsert(&H, arr[i]); } // 插入完毕 // 打印出来: printf("\n打印插入的哈希表\n"); for (int i = 0; i < 15; i++) { printf("%d,", H.key[i]); } // 插入完毕 // 哈希搜索,查找0是否在哈希表中,否的话返回-1 printf("\n哈希搜索,查找0是否在哈希表中,否的话返回-1"); i = HashSerach(H, 0, adrr); printf("\n%d", i); printf("\n哈希搜索,查找43是否在哈希表中,是的话返回0"); i = HashSerach(H, 43, adrr); printf("\n%d", i); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
4.3.2 程序结果: