
热门标签
热门文章
- 1万众期待:Guitarpro 8.1.1.17全新简谱模式强力上线!_guitar pro 简谱
- 2SpringCloud系列(26)--OpenFeign超时控制_springcloud feign client指定接口设置超时时间
- 3LabVIEW FPGA开发NI sbRIO-9607高精度数字滤波器
- 4VLOOKUP函数16种经典用法(史上最全,记得收藏)_vlookup csdn
- 5好用的Scrum管理工具有哪些?推荐3个最必备的敏捷开发管理工具_scrum过程中使用的工具
- 6TCP,TCP 连接建立,TCP 连接断开,Socket 编程_tcp连接建立 sockect
- 7Kivy教程大全之 创建您的第一个kivy程序 hello word(教程含源码)_kivy 扫码
- 8专有软件不是唯一!试试54款开源服务器软件[转]
- 9微信小程序weui的npm构建+举例搜索框实现_微信小程序的weui组件引入搜索框
- 10Android 调节亮度类_brightnesshelper
当前位置: article > 正文
ROS学习笔记13:rviz三维可视化平台(ROS常用组件)
作者:IT小白 | 2024-06-04 00:59:43
赞
踩
rviz
前言:
rviz是一款三维可视化工具,很好地兼容了各种基于ROS软件框架的机器人平台。
(1)rviz可以用XML对机器人、周围物体等任何实物进行尺寸、质量、位置、材质、关节等属性的描述,并且再界面中呈现出来。
(2)rviz还可以通过图形化方式,实时显示机器人传感器的信息、机器人的运动状态、周围环境的变化等。
(3)rviz通过机器人模型参数、机器人发布的传感器信息等数据,为用户进行所有可检测信息的图形化显示。
1.rviz数据类型介绍:

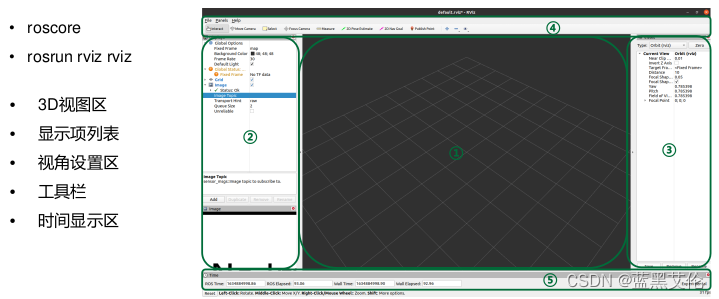
2. rviz界面介绍:
3. 实践操作:
目的:发送基本形状至rviz
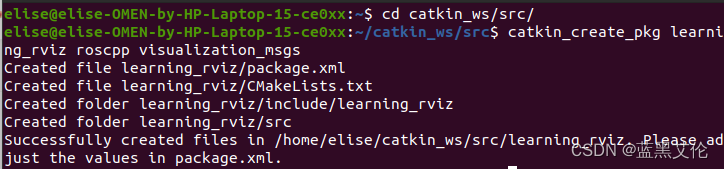
(1)创建功能包:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/IT小白/article/detail/669693
推荐阅读
相关标签

