
热门标签
热门文章
- 1[PCL使用pcl_sleep函数出现错误提示:未定义标识符“sleep”问题详解_未定义的标识符sleep
- 2stable diffusion 的controlNet 安装和使用
- 3内网穿透工具
- 4软件测试理论1_软件工程测试理论
- 5Windows10下Python36安装opencv-python遇到的错误_building windows wheels for python 3.6 requires mi
- 6Linux版本Kibana安装教程_linux安装kibana
- 7Spring三剑客:spring,sringboot,springcloud中文文档_spring三剑客电子版
- 8Mysql数据库——JDBC_mysql jdbc
- 9HBase学习总结-1_hbase shell实验总结
- 10FATAL: password authentication failed for user “postgres“_psql: fatal: password authentication failed for us
当前位置: article > 正文
机器人前馈控制MATLAB实现_基于matlab的前馈控制
作者:Monodyee | 2024-05-03 02:16:34
赞
踩
基于matlab的前馈控制
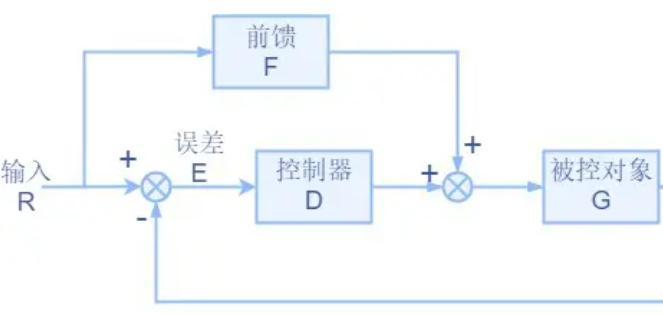
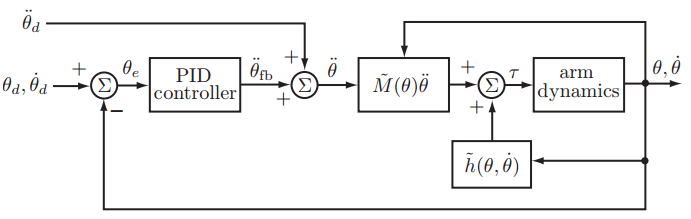
在机器人控制中,前馈控制是一种常用的方法,用于补偿系统中的已知动态。前馈控制通常与反馈控制结合使用,以提高系统的跟踪性能和响应速度。在MATLAB中实现机器人前馈控制涉及几个步骤,包括系统建模、设计前馈控制器、实现控制算法以及仿真验证。
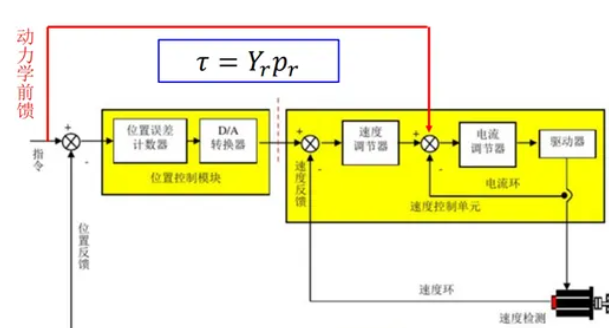
前馈控制是一种预测控制,通过对系统当前工作状态的了解,预测出下一阶段系统的运行状况。前馈的缺点是在使用时需要对系统有精确的了解,只有了解了系统模型才能有针对性的给出预测补偿。但在实际工程中并不是所有的对象都是可得到精确模型的,而且很多控制对象在运行的同时自身的结构也在发生变化。所以仅用前馈并不能达到良好的控制品质。这时就需要加入反馈,反馈的特点是根据偏差来决定控制输入,不管对象的模型如何,只要有偏差就根据偏差进行纠正,可以有效的消除稳态误差。
前馈-反馈综合控制结合二者的优点,可以提高系统响应速度。从前馈控制角度看,由于增加了反馈控制,降低了对前馈控制模型精度的要求;从反馈控制角度看,前馈控制作用对主要干扰及时进行粗调,大大减少反馈控制的负担。
https://www.cnblogs.com/wdzeng/p/11633508.html![]() https://www.cnblogs.com/wdzeng/p/11633508.html
https://www.cnblogs.com/wdzeng/p/11633508.html
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Monodyee/article/detail/527299
推荐阅读
相关标签

