
- 1Air724UG 核心板学习记录-开发板介绍
- 2看大神如何用python爬虫爬取京东商品评论_python爬虫爬取京东电商平台商品评论,要求根据商品关键字爬取
- 3探索【Stable-Diffusion WEBUI】的附加功能:图片缩放&抠图_4x-ultrasharp
- 4AI程序员的出现与程序员的未来:饭碗之争的真相
- 548位一作相聚CVPR 2024预讲会/附全部议程
- 6Flask之ajax操作示例_flask 处理 ajex
- 7LLaMA模型指令微调 字节跳动多模态视频大模型 Valley 论文详解_valley: video assistant with large language model
- 8(五)比赛中的CV算法(下)目标检测终章:Vision Transformer_为什么不用vision transformer 做bacbone 进行目标检测
- 9包含密钥的OMP压缩感知模拟(MATLAB)
- 10备战蓝桥杯,用JAVA刷洛谷算法题单:【算法2-1】前缀和、差分与离散化
自动驾驶软件和人工智能_自动驾驶 ai算法
赞
踩
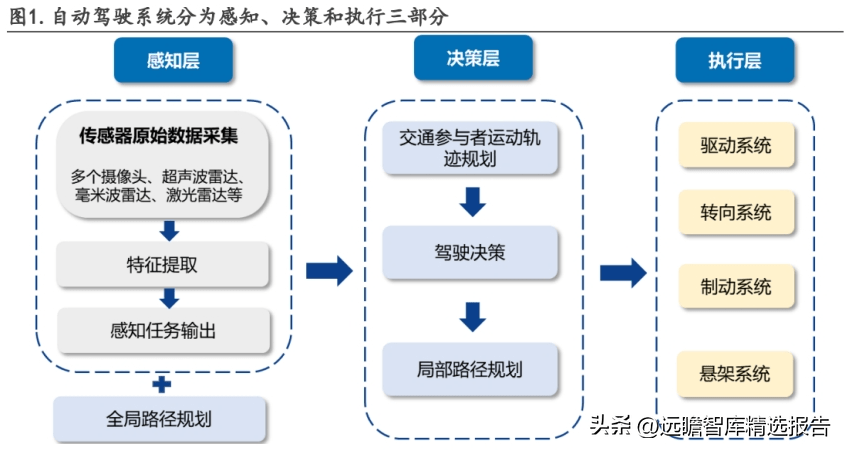
自动驾驶汽车的核心在于其软件系统,而其中的机器学习和深度学习技术是使车辆能够感知、理解、决策和行动的关键。本文将深入探讨这些技术在自动驾驶中的应用,包括感知、定位、路径规划以及道路标志和交通信号的识别。
1. 机器学习和深度学习在自动驾驶中的应用
机器学习和深度学习在自动驾驶中的应用是实现自动驾驶的关键之一。它们为车辆提供了感知、决策和控制等关键功能。以下是机器学习和深度学习在自动驾驶中的详细应用:

1.1 感知
1.1.1 目标检测
机器学习和深度学习模型可以用于检测和识别道路上的各种目标,包括其他车辆、行人、自行车和障碍物。卷积神经网络(CNN)是常用于目标检测的深度学习模型,它可以从摄像头、激光雷达等传感器收集的数据中提取特征,并标识出这些目标的位置和类别。
1.1.2 物体跟踪
一旦检测到目标,机器学习模型可以通过跟踪算法来持续追踪它们的位置和运动。这对于预测其他车辆的行为以及避免与它们发生碰撞至关重要。
1.1.3 车道检测
深度学习模型可以用于车道检测,帮助车辆保持在正确的车道内行驶。这有助于自动驾驶汽车在高速公路上保持安全的行车轨迹。
1.1.4 障碍物避免
机器学习和深度学习模型可以用于预测和避免与障碍物的碰撞。这些模型可以根据传感器数据生成避障路径,并向车辆发送相应的控制命令,以确保安全行驶。
1.2 决策和控制
1.2.1 自动驾驶决策
机器学习和深度学习模型可用于自动驾驶决策,包括超车、变道、换道和停车等。通过训练模型,车辆可以在各种交通场景中做出合适的驾驶决策。
1.2.2 模型预测控制(MPC)
模型预测控制是一种常用于自动驾驶的控制方法。它使用机器学习模型来预测车辆在未来的一段时间内的行为,并根据这些预测来生成最佳控制输入,以实现路径规划和避障。
1.3 高精度定位
1.3.1 数据融合
自动驾驶汽车通常使用多种传感器来获得高精度的定位信息。机器学习和深度学习模型可以用于将来自不同传感器的数据进行融合,以提供更准确的定位和地图匹配。
1.3.2 车辆自我定位
机器学习模型可以用于车辆自我定位,即通过分析传感器数据来确定车辆在地图上的位置。这对于在GPS信号不稳定或遮挡的情况下实现准确的定位至关重要。
1.4 道路标志和交通信号的识别
1.4.1 道路标志识别
深度学习模型可以用于检测和识别道路标志,如限速标志、停车标志和禁止标志。这有助于车辆遵守交通规则。
1.4.2 交通信号识别
机器学习和深度学习模型可以用于实时识别交通信号,包括红绿灯和行人横道。这些信息对于车辆的决策和控制至关重要。
总之,机器学习和深度学习在自动驾驶中的应用涵盖了感知、定位、路径规划、决策和控制等多个关键领域。这些技术使自动驾驶汽车能够在复杂的交通环境中安全、高效地行驶,为实现自动驾驶的梦想迈出了关键的一步。随着技术的不断进步和数据的积累,自动驾驶系统的性能将不断提高,为未来的出行方式带来革命性的变化。
2. 自动驾驶的算法和模型
自动驾驶的算法和模型是车辆实现感知、决策和控制的关键组成部分。这些算法和模型负责处理传感器数据、规划路径、做出决策,并控制车辆行动。
2.1 感知算法
感知是自动驾驶系统的第一步,它涉及到从传感器中获取和理解环境信息。以下是感知算法的一些关键方面:
2.1.1 目标检测
目标检测算法用于识别和定位道路上的各种目标,如车辆、行人和障碍物。常见的目标检测算法包括:
-
卷积神经网络 (CNN): CNN是深度学习中常用于目标检测的模型,它可以学习和提取图像中的特征,用于识别不同类型的目标。
-
YOLO (You Only Look Once): YOLO是一种实时目标检测算法,它能够在单次前向传播中同时识别多个目标。
-
SSD (Single Shot MultiBox Detector): SSD是另一种实时目标检测算法,具有高度的准确性和效率。
2.1.2 语义分割
语义分割算法将图像分为不同的区域,并为每个像素分配一个语义类别,如道路、建筑物、行人等。这有助于车辆更好地理解道路环境。
- 卷积神经网络 (CNN): CNN也可用于语义分割任务,通过像素级别的分类来生成语义分割地图。
2.1.3 障碍物跟踪
一旦检测到目标,障碍物跟踪算法可用于追踪目标的位置和运动。这有助于车辆更好地预测其他车辆和行人的行为。
- 卡尔曼滤波器: 卡尔曼滤波器是常用于目标跟踪的传统算法,它可以根据过去的观测值来估计目标的当前状态。
2.2 决策和规划算法
决策和规划算法用于确定车辆应该如何行驶,以满足安全、效率和驾驶舒适度等要求。以下是一些关键的决策和规划算法:
2.2.1 路径规划
路径规划算法负责选择车辆的行驶路径,以确保安全和高效的行驶。这些算法需要考虑到道路状况、交通流量、速度限制和其他车辆的位置。
-
A*算法: A*算法是一种常用的路径规划算法,它可以在图形中找到最短路径。
-
模型预测控制 (MPC): MPC算法结合了路径规划和控制,它可以考虑车辆的动力学特性和目标,生成最优的行驶轨迹。
2.2.2 决策制定
决策制定算法负责根据感知数据和高级规则制定行动计划,并将其转化为车辆的具体控制命令。这些算法需要考虑到安全性、效率和驾驶舒适度。
-
有限状态机 (FSM): FSM是一种常用于决策制定的模型,它根据不同的驾驶情景来选择合适的行动。
-
强化学习: 强化学习算法可以用于训练车辆在不同驾驶场景下做出决策,如超车、变道和停车。
2.3 控制算法
控制算法负责将决策转化为具体的车辆控制命令,包括加速、制动、转向和换挡。以下是一些常见的控制算法:
-
PID控制器: PID(比例-积分-微分)控制器是一种经典的反馈控制算法,用于稳定车辆的行驶和控制。
-
模型预测控制 (MPC): MPC不仅用于路径规划,还可以用于车辆的实时控制,以跟踪生成的轨迹。
-
车辆动力学模型: 控制算法需要考虑车辆的动力学特性,以确保安全的加速、制动和转向。
自动驾驶的算法和模型构成了自动驾驶系统的核心,它们使车辆能够感知、理解、决策和行动。这些算法和模型的不断改进和优化将进一步提高自动驾驶汽车的性能和安全性,为未来的交通系统带来更大的变革。
3. 道路标志和交通信号的识别
在自动驾驶中,道路标志和交通信号的识别是关键任务之一。这些标志和信号提供了有关道路规则和条件的重要信息,帮助自动驾驶系统做出正确的决策和行动。
3.1 道路标志识别
3.1.1 目标
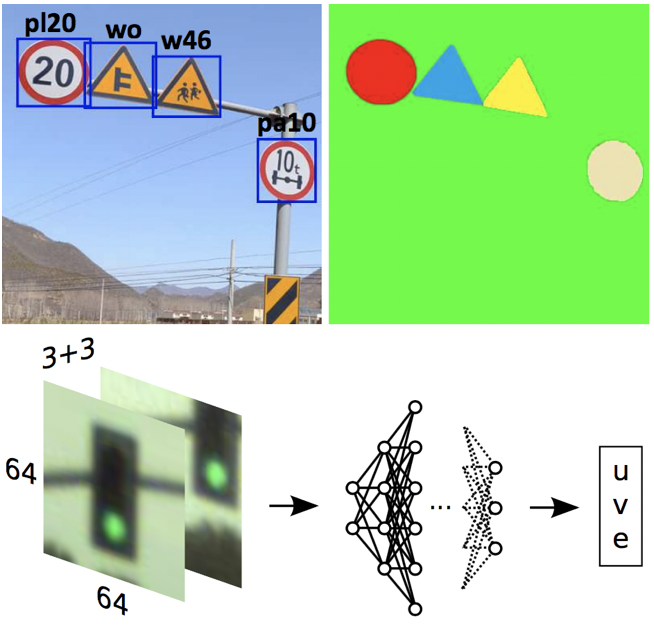
道路标志识别的目标是检测和识别道路上的各种标志,包括限速标志、停车标志、禁止标志、指示标志(如转弯标志)等。识别这些标志有助于车辆遵守交通规则和规划行为。
3.1.2 数据来源
道路标志的识别通常依赖于视觉传感器,如车载摄像头。摄像头捕获道路标志的图像,然后使用计算机视觉技术对这些图像进行分析和处理。
3.1.3 算法和模型
道路标志识别通常使用深度学习模型,如卷积神经网络(CNN)。以下是道路标志识别的基本步骤:
-
图像采集: 车辆的摄像头捕获道路标志的图像。
-
图像预处理: 对图像进行预处理,包括调整大小、去噪声和增强对比度。
-
特征提取: 使用深度学习模型提取图像中的特征,这些特征有助于标志的分类。
-
分类: 将提取的特征输入到分类器中,以确定标志的类型,例如限速标志、停车标志等。
-
识别结果: 最终,识别结果将告诉车辆系统检测到的标志类型以及相应的规则。
3.1.4 应用
道路标志识别的应用包括:
-
速度限制: 识别限速标志并根据速度限制规则自动调整车辆的速度。
-
停车和禁止标志: 检测停车标志和禁止标志,以确定停车位置和禁止行驶的区域。
-
导航和路线规划: 根据识别的标志提供导航和路线规划建议,帮助车辆按规定行驶。
3.2 交通信号识别
3.2.1 目标
交通信号识别的目标是检测和识别道路上的交通信号,包括红绿灯、行人横道信号等。交通信号识别有助于车辆遵守交通规则,特别是在交叉口和人行横道等地方。
3.2.2 数据来源
交通信号的识别同样依赖于车辆上的视觉传感器,通常是摄像头。这些摄像头捕获交通信号的图像,并将其提供给计算机视觉系统进行处理。
3.2.3 算法和模型
交通信号识别通常使用深度学习模型,也可以包括以下步骤:
-
图像采集: 摄像头捕获交通信号的图像,包括红绿灯的状态。
-
图像预处理: 对图像进行预处理,以便更好地识别信号。
-
特征提取: 使用深度学习模型提取图像中的特征,以确定信号的状态(红灯、绿灯或黄灯)。
-
分类: 将提取的特征输入到分类器中,以确定信号的状态。
-
识别结果: 最终的识别结果告诉车辆系统当前交通信号的状态,以便采取适当的行动。
3.2.4 应用
交通信号识别的应用包括:
-
红绿灯控制: 根据识别的红绿灯状态来控制车辆的停车和行驶。
-
人行横道信号: 识别行人横道信号,以便采取适当的行动,如减速或停车。
-
交叉口安全: 在交叉口识别交通信号有助于车辆在复杂的交通场景中安全驾驶。
道路标志和交通信号的识别对于自动驾驶汽车的安全和合规非常重要。深度学习和计算机视觉技术使车辆能够实时识别这些标志和信号,帮助车辆在复杂的交通环境中行驶。这些技术的不断改进将提高自动驾驶汽车的性能和安全性。
4 结论
机器学习和深度学习技术是自动驾驶汽车的核心,它们使车辆能够感知、理解、决策和行动。这些技术在感知、定位、路径规划以及道路标志和交通信号的识别等方面都发挥着关键作用。随着技术的不断进步,自动驾驶汽车将变得更加智能、安全和可靠,为未来的交通系统带来了革命性的变化。然而,确保系统的安全性和可靠性仍然是一个持续的挑战和重要任务。

