
热门标签
热门文章
- 1[开源]免费开源MES系统,精美的可视化数字大屏,支持低代码大屏设计_.net开源的mes系统
- 2Vmware View常见问题汇总(一)
- 3【FPGA】clocking wizard配置(PLL/MMC内核配置)
- 4《python数据分析与挖掘实战》笔记第5章_数据分析与挖掘实战第五章代码
- 5【C++】list模拟实现
- 6FFMPEG_ffmpeg threads
- 7算法笔记:优先权队列
- 8MATLAB实现LSTM时间序列预测_lstm预测一维数据matlab
- 9基于Python+Neo4j+民航数据 ,我搭建了一个知识图谱的自动问答系统
- 10DFS实现floodfill算法_dfs floodfilldfsfloodfill
当前位置: article > 正文
使用DeepStream5.0部署YOLOV3,并实现多路拉流、自定义模型_c++ deepstream拉流nx
作者:weixin_40725706 | 2024-04-14 20:10:56
赞
踩
c++ deepstream拉流nx
一、前言
本文介绍基于DeepStream5.0和YoloV3目标检测模型来实现车辆和行人检测的部署过程。在第二部分介绍依赖的环境;第三、四部分介绍YoloV3的样例工程和编译运行过程;第五部分介绍如何实现多路拉流;第六部分介绍如何自定义YOLOV3模型;最后是小结和参考资料。
希望本文尽可能的详细和清晰,让大家在动手尝试过程中少走弯路,一步到位。
二、环境准备
- Cuda10.2
- Jetpack4.4
- Ubuntu18.04
- DeepStream SDK >= 5.0
- 硬件设备我这里使用的是NVIDIA Jetson AGX Xavier ,包括Nano、TX2、NX都是可以的。
三、YoloV3工程结构
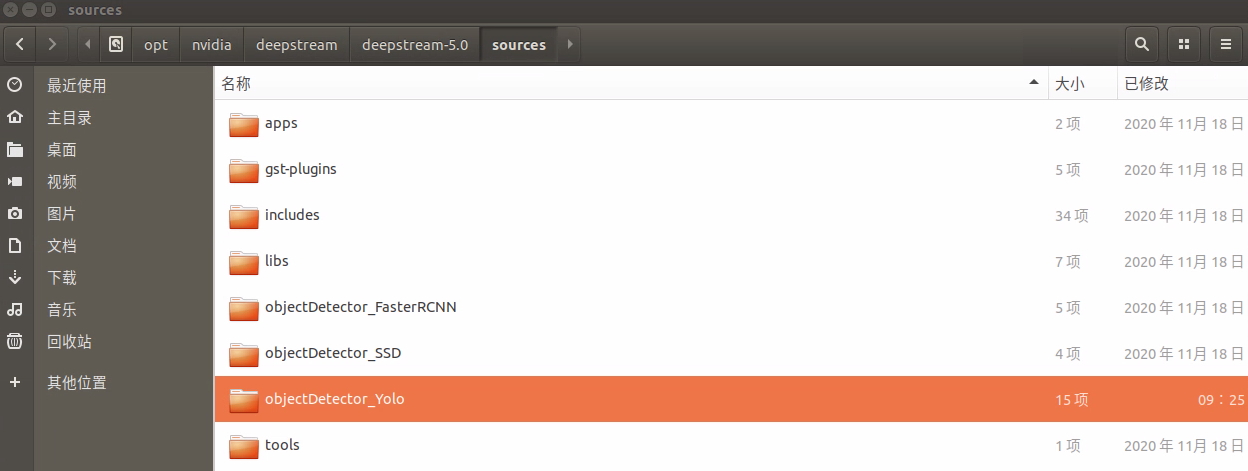
DeepStream在安装完成后,默认会自动安装到以下目录内:/opt/nvidia/deepstream/deepstream-5.0。
sources目录各个文件夹功能介绍:(如下图所示)
- apps
- sample_apps:这里官方提供了可直接执行的应用。如deepstream-app, deepstream-test1, deepstream-test2, deepstream-test3, deepstream-test4, deepstream-mrnn-test等20个。
- gst-plugins: NVIDIA deepstream框架提供的gstreamer 插件
- includes: 头文件
- libs: 库文件
- objectDetector_FasterRCNN: 提供了一个FasterRCNN模型的工作示例
- objectDetector_SSD: 提供了一个 SSD模型的工作示例
- objectDetector_Yolo: 提供了一个 YOLO 模型的工作示例
- tools: 日志相关的功能
我们的目的是通过objectDetector_Yolo工程来编译生成动态链接库(一个so文件),并在DeepStream 应用程序中应用YOLOV3来实现目标检测。
在objectDetector_Yolo 目录内,包含三部分内容:
-
nvdsinfer_custom_impl_yolo文件夹: yolo实现代码
-
配置文件
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/423895
推荐阅读
相关标签

