
- 1使用ffmpeg从视频中提取纯音频&纯视频_ffmpeg提取音频
- 2网络基础——ACL和NAT介绍_nat acl
- 3UPLOAD_ERR_upload.err
- 4openVPN搭建,安装,使用
- 5nvm常用命令有哪些?nvm如何切换node版本?nvm如何下载node?nvm安装包_nvm下载node命令
- 6批量爬取Google Trends的日频数据,实现EXCEL实时存储_turraqzez27cdacdrs6ws49jplpbj23pf5
- 7Python爬虫——多线程爬虫如何实现?_爬虫线程怎么用
- 8Vue Element table表格实现表格数据动态滚动(无限滚动)_element table 动态无限滚动
- 9elementui el-table表格自动循环滚动_element table滚轮
- 10ssh连接时提示THE AUTHENTICITY OF HOST XX CAN'T BE ESTABLISHED
3D图形:矩阵的行列式,矩阵的逆、正交矩阵、齐次矩阵_2x2行列式计算示意图
赞
踩

前言
在前面我们说到关于矩阵的一些计算知识,相信大家已经觉得进入了水深火热之中了,那么为了让大家感到更加刺激的视觉体验和感官体验,这一篇博客,我将对矩阵的行列式,矩阵的逆,正交矩阵,齐次矩阵进行探讨研究整理.我很庆幸你们看到这里了,为什么这么说呢?其实呢,因为齐次矩阵是我们平常开发用的比较多的,我曾经在Core Graphics框架 :仿射变换与齐次坐标简单的提到过(小白视角),这篇我将对齐次矩阵进行进一步的说明.
那么接下来,好戏登场了.
矩阵的行列式
在任意的一个方阵都存在这样的一个标量,称作该方阵的行列式.一开始如果我一顿说概念,可能到时候懵的就不单单是读者了,连我自己都会懵逼的,我们就用实际的例子来说明行列式以及行列式的几何意义.
线性运算法则
首先,我们先看方阵M的行列式为 |M|,(注明:非方阵的行列式是未定义的)我们先从最简单的2x2的方阵来说明.2x2的方阵的行列式具体的定义如下所示.
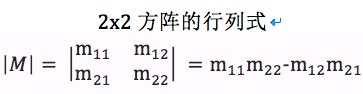
那么这里要注意的一点就是不能书写行列式的时候,不能像矩阵使用方括号了,我们要使用的是两条竖线…
根据书上所说的,我们可以这样进行记忆计算过程,将主对角线和反对角线的元素各自相乘,然后主对角线上的积减去反对角线元素的积.如下图所示.当然了,这是适用于2x2方阵的行列式的计算,3x3方阵的行列式计算可不是这么简单的,要麻烦的多得多.客官容我慢慢道来.

2x2方阵的行列式的计算例子如下所示.

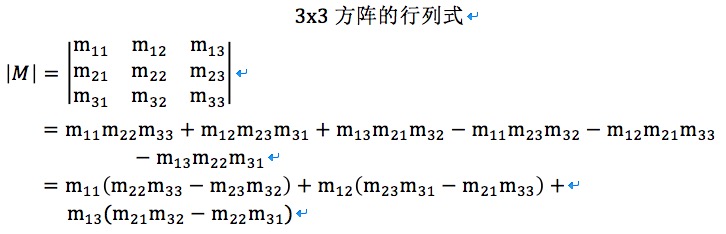
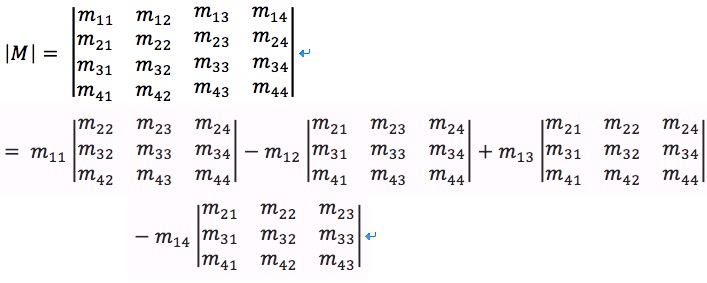
上面基本就是2x2方阵行列式的计算的所有内容了,接下来我们看3x3方阵行列式的计算.首先我们先看一下3x3方阵行列式的定义.
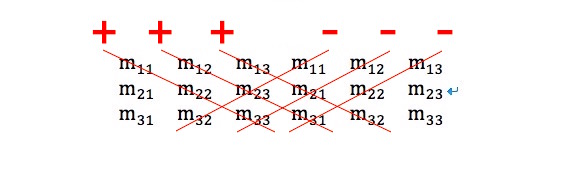
看上去是不是很麻烦?其实当我们掌握它的计算技巧之后,可以很简单的计算出来.首先先把矩阵M连写两遍,接着如图所示进行计算.
好了经过2x2方阵和3x3方阵的洗礼,我们逐渐懵圈了,而且方阵的难道我们就只能这样计算行列式吗?不不不,数学界的前辈们已经为了我们留下来宝贵的计算方式,那就是余子式和代数余子式,两者的使用和不同就让我们一睹为快吧.
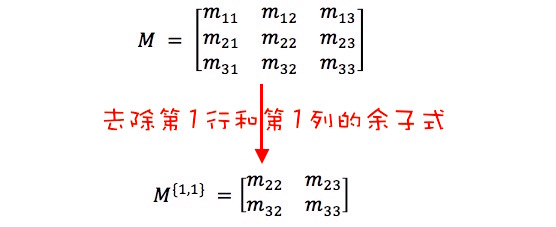
首先我们先看一下余子式.我们首先看一下概念,假设一个矩阵M,去除第i行和第j列之后剩下的矩阵就是矩阵M的余子式(i和j的限制条件就不过多解释说明了),记法如下所示.

接下来,我们用一个示例来做一下说明余子式是如何生成的.
上面我们已经对余子式的定义和计算方法有所了解.那么接下来,我们要对余子式的相关知识来做一下说明.那么什么叫代数余子式呢?
代数余子式是这样定义的,对于一个方阵M,给定行、列元素的代数余子式等于对应的余子式的有符号的行列式.我们把上面的这句定义给提炼一下,某个矩阵的代数余子式是行列式,那么我们已经注意到了,某个矩阵的余子式是一个矩阵.这样我们就知道两者的不同之处了,一个是标量,一个是矩阵,这就是两者的不同之处.好了,了解完两者的不同之处之后,我们来看代数余子式的计算方法是怎么定义的,如下所示.

只有上面的公式让我们感到很无助不是,那么接下来我们用一个接着余子式的示例来求解对应的代数余子式.如下所示.

那么说了这么多余子式和代数余子式的知识,到底对我们的行列式的求解有什么帮助呢?其实,我们是可以利用余子式和代数余子式直接计算任意n维方阵的行列式,首先,我们找到矩阵的任意一行i(i不大于最大行数),然后,列数j依次增加.具体的计算公式如下所示.

那么有了公式之后避免不了就是验证,接下来我们就用公式来推导4x4方阵的行列式.由于有了计算公式的便利,我们计算起来就比较方便了,但是我们要仔细判断每一个项的正负(自己验证的时候没注意,验证出错两三遍).这里,我选择的i =1(自己验证的时候可自行选择i) ,具体的验证过程如下所示.(由于其中的项过多,所以分两步截图.)
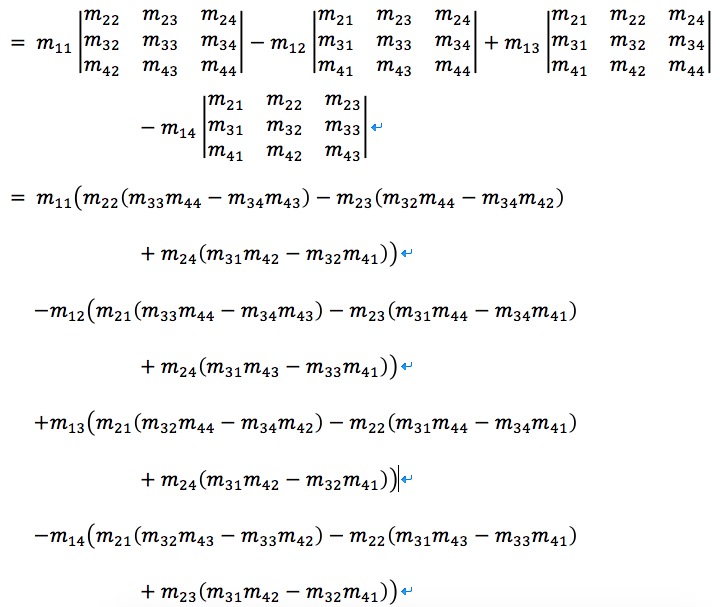
通过上面我们发现,行数列数越多的方阵行列式的复杂度就会越高.复杂度会呈指数增长.我们计算到4x4的就已经非常的麻烦了(其实4x4的行列式我们已经够用了),那么要是在来个10x10的方阵行列式,我们岂不要疯掉?这里,书中提到了一种行列式的计算方式叫做"主元选择"的计算方式,感兴趣的小伙伴可自行查询资料.
上面我们已经说完了行列式,但是说了一大堆,我们还是懵圈的,那么行列式是用来干什么的呢?或者说是行列式代表着什么意义呢?其实,在2D中行列式代表着以基向量为两边的平行四边形的有符号面积.在3D环境中则代表着以基向量为三边的平行六面体有符号体积.我们看以下示例来验证我们的想法.
如图所示,在2D环境中有基向量v = [3 0] ,u = [1 2].
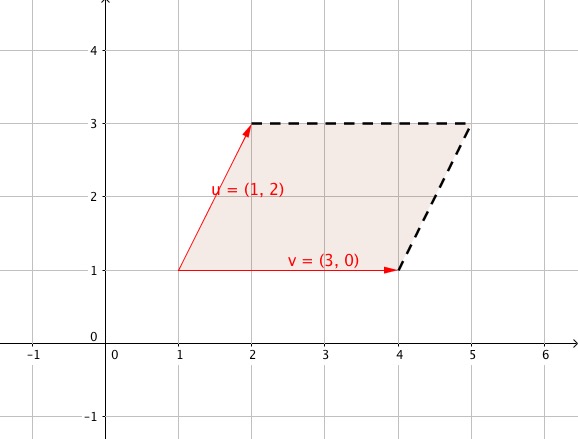
那么它的面积是3x2 = 6,它的行列式是3x2-1x0 = 6,我们发现行列式是和面积相等的(当然了,如果基向量v = [-3 0] ,行列式最终计算出来的值为-6)
接下来,我们看一下在3D环境中的有三个基向量u = [2 0 0],v = [1 2 0],w= [0 0 1],如图所示.
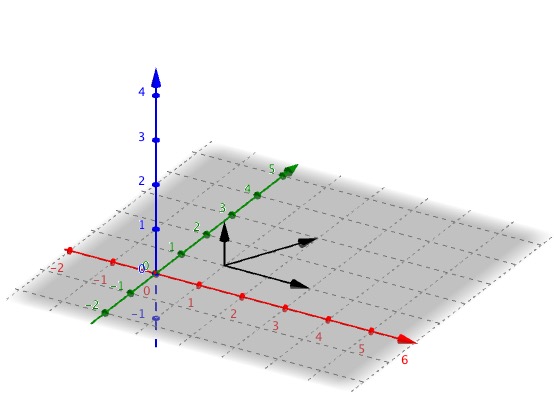
然后我们计算由上面三个基向量所围成的正六面体的体积为1x2x2 = 4,计算的三个基向量所组成的矩阵的行列式.发现两者的绝对值是相等的.如下所示.


矩阵的逆
矩阵的逆和矩阵的转置是有所不同的,矩阵的转置请查看3D图形:矩阵的相关知识.求逆运算有个先决条件,那就是只有方阵才可以进行求逆运算.
首先我们看一下方阵的逆是如何定义的.假设一个方阵M,方阵M的逆,记作M-1**,方阵的逆也是一个矩阵.当**M**和**M-1相乘的时候,结果是单位矩阵I.如下所示.

那么我该如何计算方阵M的逆呢?在我看的3D图形上是给出了如下的方法.

在上面的公式中矩阵的行列式我们知道如何求解,那么adj M是什么鬼?adj M叫做矩阵M的伴随矩阵,定义为矩阵M的代数余子式矩阵的转置矩阵(挺绕口).没事,我们看一下示例是如何解释的这个的.假设矩阵M如下所示.
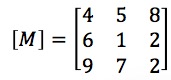
那么接下来,我们把矩阵中所有的元素的代数余子式求解出来,如下所示.
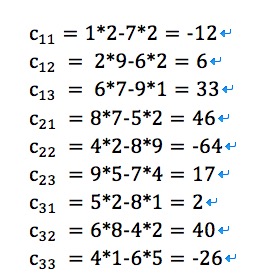
那么代数余子式的转置矩阵(adjM)如下所示.

代数余子式的转置矩阵(adjM),我们已经求解出来了,接下来,我们就要求解矩阵的逆了.套用公式计算过程如下所示.

上面我们知道了矩阵的逆的概念和计算方法,那么它的实际作用是什么呢?或者说是它的几何意义是什么呢?其实矩阵的逆主要适用于"撤销"功能的实现.比如一个向量ν通过矩阵M进行了变换,然后呢,我们可以再呈上M的逆矩阵,这样就撤销了变换动作了,验证过程如下所示.

正交矩阵
先来看一下正交矩阵是如何定义的,若方阵M是正交的,则当且仅当M与他的转置矩阵M^T的乘积等于单位矩阵,那么就称矩阵M为正交矩阵.

在矩阵的逆中我们知道,矩阵的逆和矩阵的乘积为单位矩阵I,由此推理,我们可以知道,如果该矩阵为正交矩阵,那么矩阵的逆和转置矩阵是相等的.
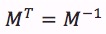
那么正交矩阵存在的意义是什么呢?其实如果一个矩阵是正交矩阵,那么矩阵的逆和转置矩阵是相等的.转置矩阵是非常简单计算的,而计算矩阵的逆如果使用代数余子式计算是非常的麻烦,所以我们可以直接计算转置矩阵然后直接得到该矩阵的逆.
4X4齐次矩阵
DuangDuangduang~本文的最重要的部分–齐次矩阵,在说其相关内容之前,我们要先用两个比较经典的示例来说一下齐次空间是如何出现的,(范例是从网上寻找到,莫怪)
两条平行线会相交吗?
在没有认识到齐次空间之前,我们知道两条平行线是不能相交的,但是两条平行线真的不能相交吗?我们看下面这幅图,我们都知道两条铁轨是平行的,但是这两条平行的铁轨在无穷远处会相交于一点.这对吗?在笛卡尔2D坐标系中, 我们用 (x, y) 表示笛卡尔空间中的一个 2D 点,而处于无限远处的点 (∞,∞) 在笛卡尔空间里是没有意义的。所以我们是无法解释这种现象的,但是在齐次空间中,我们可以解释这种现象.

带着上面的两个问题,我们开始我们的齐次坐标之旅.其实齐次空间的出现主要是用于投影问题的解决.所谓齐次坐标就是将一个原本是n维的向量用一个n+1维向量来表示. 4D齐次空间有4个分量分别是(x,y,z,w),第四个是w,称为齐次坐标.那么在3D笛卡尔坐标系中可以使用其次坐标表示为(x/w,y/w,z/w).
那么我们就解决第一个问题,解释两条平行线投射到一个2D平面中相交于一点.我们知道在2D笛卡尔坐标系中用Ax+By+C= 0表示一条直线.两条平行直线相交的话,要关联两个方程式.如下所示.
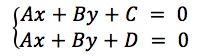
在笛卡尔坐标系中,上述的两者如果相交,那么C=D=0,也就是两者是同一条过原点的直线.显然是解释不了两条平行线相交于一点的.如果我们引入齐次坐标的概念的话,我们把x/w, y/w 代替 x, y 放到投影空间里,如下所示.
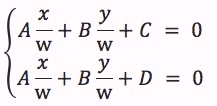
上面的方程式组可以转换为下面的方程式组.

在C≠D的情况下,那么对方程组求解,就是w = 0两条直线相交,那么就是(x,y,0).两条直线相交于无限远处.
那么引进齐次坐标有什么必要,它有什么优点呢?
1.它提供了用矩阵运算把二维、三维甚至高维空间中的一个点集从一个坐标系变换到另一个坐标系的有效方法.
2.它可以表示无穷远的点。n+1维的齐次坐标中如果h=0,实际上就表示了n维空间的一个无穷远点。对于齐次坐标[a,b,h],保持a,b不变, 点沿直线 ax+by=0 逐渐走向无穷远处的过程.
4X4平移矩阵
在3D图形:矩阵与线性变换我说过几种线性变换,比如旋转,缩放,镜像等等,唯独没有平移,但是在日常开发过程中,平移应该算的上我们很常用的一种仿射变换了.那么这是为什么呢?根据书上所说,矩阵的乘法性质所决定的,零向量总是变换成零向量,所以任何矩阵的乘法表达的变换是不会有平移的.但是我们却可以使用4X4平移矩阵表示3D环境中的平移变换,使用3X3平移矩阵表示2D环境中的平移变换.(假设w不变且w = 1)具体公式如下所示.


虽然在4D中,矩阵的乘法仍然是线性的,矩阵的乘法不能表示4D中的平移,却能代表着3D环境中的平移变换.
结束
在写这篇博客自我认为收获最大的莫过于平移变换矩阵了,因为其他我们子啊平常开发过程中可能使用的不太多,但是平移,缩放,旋转这三个常见的仿射变换确实最常见的.对于本篇文章中还有几个一知半解的位置,一个是对齐次坐标的解释.一个是4X4平移矩阵的推导过程,如果有深入对这方面有所了解的大神,希望能对此解释解释,骚栋感激不尽.下一篇博客我将对投影坐标系,以及透视投影做深一步的了解研究.如果喜欢骚栋,可以关注我,谢谢.
最后还是要附上<<3D数学基础 图形与游戏开发>>的pdf版的传送门.
-> <<3D数学基础 图形与游戏开发>>传送门声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/不正经/article/detail/110825
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

