
- 1干货|Flutter 原理与闲鱼深度实践_咸鱼app的技术是用flutter还是reactnative
- 2展望2024!记住这份软件测试八股文还怕不能拿offer?_2024八股文
- 3外卖订餐小程序|基于微信小程序的外卖订餐系统设计与实现(源码+数据库+文档)_微信点餐小程序数据库er图
- 4云计算时代改变了什么?_大数据、云计算改变了什么的结果
- 5基于R语言地理加权回归、主成份分析、判别分析等空间异质性数据分析教程
- 6从ChatGPT看AI未来趋势和挑战 | 万字长文
- 7设置phpmyadmin链接多个数据库_phpmyadmin 在页面上同时打开多个数据库
- 8AES-CBC加密流程和一些对于编码的心得
- 9binbinyang---自定义ImagView---实现任意图片.上面添加文字_android 自定义view 在图片上方添加文字
- 10【数据结构】顺序表的实现及应用(0基础)_数据结构顺序表实际应用问题
时序预测 | Transformer时间序列预测 Matlab代码_autoformer是neurips的最佳论文吗
赞
踩
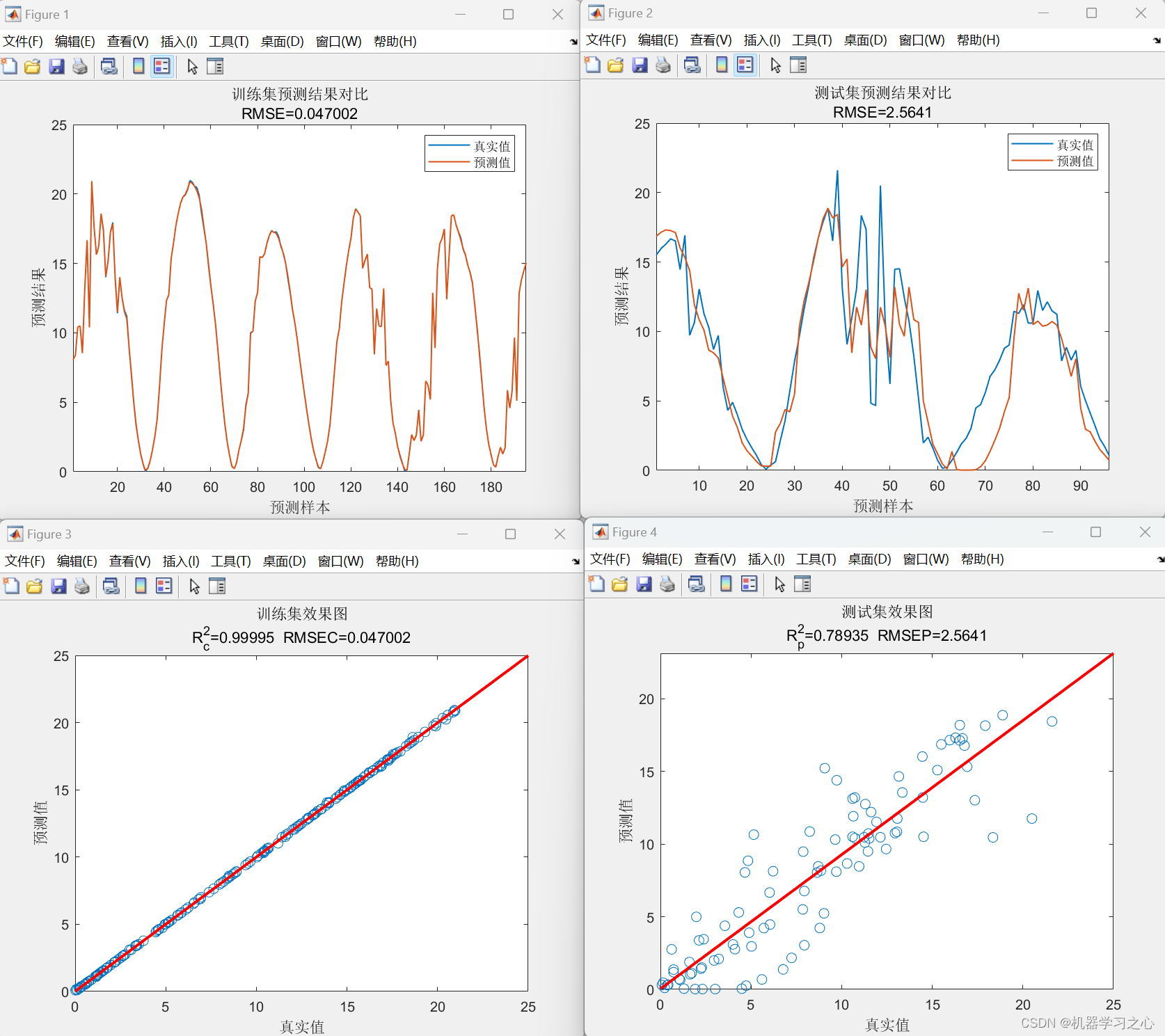
效果一览
文章概述
1.时序预测 | Transformer时间序列预测 Matlab代码
2.单变量时间序列预测;
3.多指标评价,评价指标包括:R2、MAE、MBE等,代码质量极高;
4.excel数据,方便替换,运行环境2020及以上。
长期以来,时间序列预测一直使用统计方法(例如,自回归综合移动平均(ARIMA,指数平滑和结构模型)。一般来说,统计方法中使用的参数模型需要大量的领域专业知识来构建。为了减轻这种负担,许多机器学习技术,如梯度推进回归树(gradient boosting Retression tree,GBRT)得到了应用,它以数据驱动的方式学习时间序列的时间动态。然而,这些方法仍然需要手动特征工程和模型设计。深度神经网络(DNN)可以子鄂东从大量数据中获得的强大表示学习能力,出现了各种基于深度学习的TSF解决方案,在许多情况下取得了比传统技术更好的预测精度。
基于递归神经网络(RNN)的方法和基于卷积神经网络(CNN)的方法也被应用到TSF任务上。基于RNN的TSF方法属于迭代多步(IMS)预测。根据解码器是否以自回归方式实现,基于CNN的TSF方法即存在迭代多步(IMS)预测技术,也存在直接多步骤(DMS)预测技术。
Transformer可以说是最成功的序列建模架构,它在各种人工智能应用中表现出无与伦比的性能,如自然语言处理、语音识别和运动分析。最近,出现了很多基于Transformer的时间序列分析的工作。其中TSF任务的一些优秀的工作包括:LogTrans(NeurIPS 2019),Informer(AAAI 2021最佳论文),Autoformer(NeurIPS 2021),Pyraformer(ICLR 2022 ORAL),以及最近的FEDformer(ICML 2022)。
源码设计
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%% CSDN博主机器学习之心
%% 清空环境变量
warning off % 关闭报警信息
close all % 关闭开启的图窗
clear % 清空变量
clc % 清空命令行
%% 数据集分析
outdim = 1; % 最后一列为输出
% 输入特征维度
%% 划分训练集和测试集
P_train = res(1: num_train_s, 1: f_)';
T_train = res(1: num_train_s, f_ + 1: end)';
M = size(P_train, 2);
P_test = res(num_train_s + 1: end, 1: f_)';
T_test = res(num_train_s + 1: end, f_ + 1: end)';
N = size(P_test, 2);
%% 数据归一化
[p_train, ps_input] = mapminmax(P_train, 0, 1);
p_test = mapminmax('apply', P_test, ps_input);
[t_train, ps_output] = mapminmax(T_train, 0, 1);
t_test = mapminmax('apply', T_test, ps_output);
%----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
%% 数据反归一化
T_sim1 = mapminmax('reverse', t_sim1, ps_output);
T_sim2 = mapminmax('reverse', t_sim2, ps_output);
%% 均方根误差
error1 = sqrt(sum((T_sim1 - T_train).^2) ./ M);
error2 = sqrt(sum((T_sim2 - T_test ).^2) ./ N);
%save BP T_train T_test T_sim1 T_sim2
%% 相关指标计算
% R2
R1 = 1 - norm(T_train - T_sim1)^2 / norm(T_train - mean(T_train))^2;
R2 = 1 - norm(T_test - T_sim2)^2 / norm(T_test - mean(T_test ))^2;
disp(['训练集数据的R2为:', num2str(R1)])
disp(['测试集数据的R2为:', num2str(R2)])
% MAE
mae1 = sum(abs(T_sim1 - T_train)) ./ M ;
mae2 = sum(abs(T_sim2 - T_test )) ./ N ;
disp(['训练集数据的MAE为:', num2str(mae1)])
disp(['测试集数据的MAE为:', num2str(mae2)])
%% 平均绝对百分比误差MAPE
MAPE1 = mean(abs((T_train - T_sim1)./T_train));
MAPE2 = mean(abs((T_test - T_sim2)./T_test));
disp(['训练集数据的MAPE为:', num2str(MAPE1)])
disp(['测试集数据的MAPE为:', num2str(MAPE2)])
% MBE
mbe1 = sum(T_sim1 - T_train) ./ M ;
mbe2 = sum(T_sim2 - T_test ) ./ N ;
disp(['训练集数据的MBE为:', num2str(mbe1)])
disp(['测试集数据的MBE为:', num2str(mbe2)])
%均方误差 MSE
mse1 = sum((T_sim1 - T_train).^2)./M;
mse2 = sum((T_sim2 - T_test).^2)./N;
disp(['训练集数据的MSE为:', num2str(mse1)])
disp(['测试集数据的MSE为:', num2str(mse2)])
%% 绘图
figure
plot(1: M, T_train, '-', 1: M, T_sim1, '-', 'LineWidth', 1)
legend('真实值', '预测值')
xlabel('预测样本')
ylabel('预测结果')
string = {'训练集预测结果对比'; ['RMSE=' num2str(error1)]};
title(string)
xlim([1, M])
figure
plot(1: N, T_test, '-', 1: N, T_sim2, '-', 'LineWidth', 1)
legend('真实值', '预测值')
xlabel('预测样本')
ylabel('预测结果')
string = {'测试集预测结果对比'; ['RMSE=' num2str(error2)]};
title(string)
xlim([1, N])
%% 绘制线性拟合图
%% 训练集拟合效果图
figure
plot(T_train,T_sim1,'o','Markersize',7);
xlabel('真实值')
ylabel('预测值')
string = {'训练集效果图';['R^2_c=' num2str(R1) ' RMSEC=' num2str(error1) ]};
title(string)
hold on ;h=lsline;
set(h,'LineWidth',2,'LineStyle','-','Color',[1 0 0])
%% 预测集拟合效果图
figure
plot(T_test,T_sim2,'o','Markersize',7);
xlabel('真实值')
ylabel('预测值')
string1 = {'测试集效果图';['R^2_p=' num2str(R2) ' RMSEP=' num2str(error2) ]};
title(string1)
hold on ;h=lsline();
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
参考资料
[1] Eric A. Wan, Rudolph van der Merwe. The Unscented Kalman Filter for Nonlinear Estimation. Oregon Graduate Institute of Science & Technology, Feb 2000
[2] carbon_emission_prediction_and_forecast

