
大疆livox雷达调试_livox rviz transform sender
赞
踩
前言
硬件:
大疆livox三维激光雷达
英伟达NX
软件:
Ubuntu18.04
ROS Melodic
1.Livox常见问题可点击wiki链接:https://livox-wiki-cn.readthedocs.io/zh_CN/latest/;
2.Livox SDK&Ros Driver及开源算法,可点击如下链接查询及下载:https://github.com/Livox-SDK/;
3.Livox激光雷达相关介绍资料可点击如下链接下载:https://www.livoxtech.com/cn/downloads
一、安装SDK
sudo apt install cmake
- 1
git clone https://github.com/Livox-SDK/Livox-SDK.git
- 1
cd Livox-SDK
- 1
cd build && cmake ..
- 1
make
- 1
sudo make install
- 1
将雷达上电后,通过网线连接NX板卡和Livox Hub(给Livox供电并且上面有网口的银色的盒子)
在~/Livox-SDK/build/sample/hub$执行
./hub_sample
- 1
终端会出现以下提示:

其中Broadcast code :后面的3JEDJCP001JB941为雷达的广播码,每个雷达不一样,可以在雷达机身的QR 码下面查看,保存该码,后面会用到.
二、安装ROS驱动并启动雷达
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
- 1
cd ws_livox
- 1
catkin_make
- 1
source ./devel/setup.sh
- 1
在执行ROS驱动前,将雷达上电,用网线通过hub连接板卡,等到板卡连接到雷达后,修改雷达IP:
sudo ifconfig eth0 192.168.1.50
- 1
这里的eth0根据板卡具体识别出来的端口名确定。
然后在ws_livox下执行ROS驱动,格式如下:
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="3JEDJCP001JB941"
- 1
命令中最后的广播码3JEDJCP001JB941每个雷达不一样,根据自己的雷达修改.
执行完后会自动打开RVIZ,并且会在rviz中看到点云数据

如果最后一步无法在rviz中查看到点云,则再次执行:
sudo ifconfig eth0 192.168.1.50
- 1
直到执行launch的终端出现一下信息并且rviz中能看到点云.

三、利用livox_viewer查看点云数据
livox_viewer无法在NX上安装,因此在笔记本上测试。
下载地址:
https://www.livoxtech.com/downloads

将雷达上电,用网线通过hub连接电脑。在解压后的livox_viewer软件目录下执行./livox_viewer.sh启动livox_viewer.设置网络为雷达的网络端口,如下:

然后打开
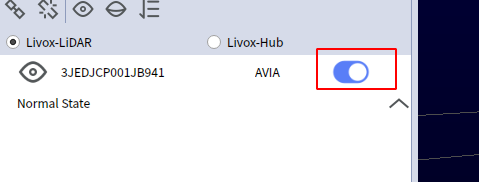
然后开始运行
即可看到点云

点击如下选项可以对雷达的参数进行设置

四、建图
cd ~/ws_livox/src
- 1
git clone https://github.com/Livox-SDK/livox_mapping.git
- 1
cd ..
- 1
catkin_make
- 1
source ~/catkin_ws/devel/setup.bash
- 1
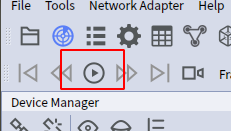
执行建图:这一步执行后,RVIZ中是没有数据的,因为还没执行驱动
roslaunch livox_mapping mapping_mid.launch
- 1
执行驱动:这一步执行后,rviz中就会有建图的数据.需要注意的是,确保执行该命令后有数据出来,也就是第二节中有点云出来才行
roslaunch livox_ros_driver livox_lidar.launch
- 1
效果如下:


