
热门标签
当前位置: article > 正文
【STM32激光测距】STP-23、cubemx、HAL库、串口中断、测距模块、激光测距、单点激光、_激光测距hal库
作者:代码探险家 | 2024-06-25 07:38:31
赞
踩
激光测距hal库
前言

在一个项目中使用到了一个激光模块,使用的是轮趣科技的STP-23激光传感器,这个模块采用的usart串口,不过只需要收就可以 了,不需要给它发送数据。
例程中使用的芯片是stm32f401ccu6
本文使用的cubemx生成的HAL库
本文并未对各个函数进行讲解,只是如何应用,小白勿喷!!
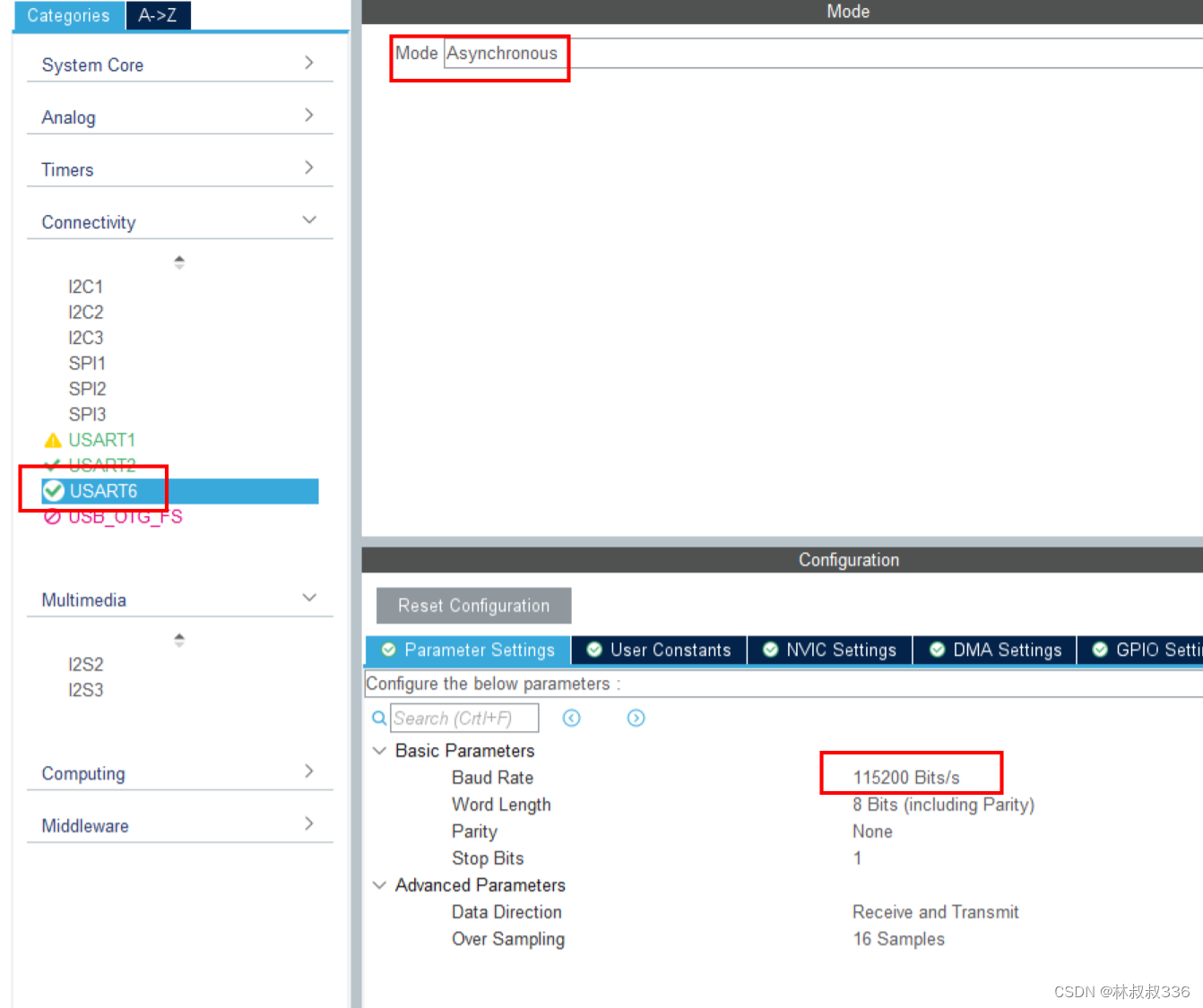
一、CUBEMX的配置
首先最基础的配置这里就不进行演示了,直接是usart的配置。
要将波特率改为921600,

然后就是开启中断

还需要再开一个usart把数据通过串口模块打印在电脑上。
二、代码修改
配置完成以后使用cubemx生成代码随后我们进行代码的修改
1.普通usart的打印验证(这段要是确保无误的话可以跳过)
在usart.c文件中需要添加
/* USER CODE BEGIN 0 */
#include <stdio.h>
/* USER CODE END 0 */
- 1
- 2
- 3
随后在此文件的文末添加
/* USER CODE BEGIN 1 */ int fputc(int ch,FILE *f) { /*发送一个字节到串口*/ HAL_UART_Transmit(&huart6,(uint8_t*)&ch,1,1000); return (ch); } int fgetc(FILE *f) { uint8_t ch; HAL_UART_Receive(&huart6,(uint8_t *)&ch,sizeof(ch),0xFFFF); return ch; } /* USER CODE END 1 */

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
还需要勾选微库

随后在主函数 main.c中去验证
先包含微库
/* USER CODE BEGIN Includes */
#include <stdio.h>
/* USER CODE END Includes */
- 1
- 2
- 3
随后在主循环中进行打印测试
printf("hello world!\n");
HAL_Delay(100);
- 1
- 2
2.中断服务函数的修改
首先是在main.c 中添加两个全局变量。
/* USER CODE BEGIN PM */
uint16_t receive_cnt;
uint16_t distance;
/* USER CODE END PM */
- 1
- 2
- 3
- 4
随后在初始化的时候打开中断(这里很重要,不打开没有值~!!!!)
/* USER CODE BEGIN 2 */
__HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE);
/* USER CODE END 2 */
- 1
- 2
- 3
最后我们去修改It.c和.h文件
先改.h文件
最开始要定义几个变量和常量以及宏定义:
/* USER CODE BEGIN EC */ typedef unsigned char uint8_t; typedef unsigned short uint16_t; typedef unsigned int uint32_t; typedef signed char int8_t; typedef signed short int16_t; typedef signed int int32_t; /* USER CODE END EC */ /* Exported macro ------------------------------------------------------------*/ /* USER CODE BEGIN EM */ #define ANGLE_PER_FRAME 12 #define HEADER 0x54 #define POINT_PER_PACK 12 #define VERLEN 0x2C //低五位是一帧数据接收到的点数,目前固定是12,高三位固定为1 typedef struct __attribute__((packed)) Point_Data { uint16_t distance;//距离 uint8_t intensity;//置信度 }LidarPointStructDef; typedef struct __attribute__((packed)) Pack_Data { uint8_t header; uint8_t ver_len; uint16_t temperature; uint16_t start_angle; LidarPointStructDef point[POINT_PER_PACK]; uint16_t end_angle; uint16_t timestamp; uint8_t crc8; }LiDARFrameTypeDef; /* USER CODE END EM */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
然后是申明函数:
/* USER CODE BEGIN EFP */
void data_process(void);
/* USER CODE END EFP */
- 1
- 2
- 3
现在去改.c文件
先定义变量和常量以及申明外部变量
/* USER CODE BEGIN PD */ LiDARFrameTypeDef Pack_Data;//雷达接收的数据储存在这个变量之中 extern uint16_t receive_cnt; extern uint16_t distance; static const uint8_t CrcTable[256] = { 0x00, 0x4d, 0x9a, 0xd7, 0x79, 0x34, 0xe3, 0xae, 0xf2, 0xbf, 0x68, 0x25, 0x8b, 0xc6, 0x11, 0x5c, 0xa9, 0xe4, 0x33, 0x7e, 0xd0, 0x9d, 0x4a, 0x07, 0x5b, 0x16, 0xc1, 0x8c, 0x22, 0x6f, 0xb8, 0xf5, 0x1f, 0x52, 0x85, 0xc8, 0x66, 0x2b, 0xfc, 0xb1, 0xed, 0xa0, 0x77, 0x3a, 0x94, 0xd9, 0x0e, 0x43, 0xb6, 0xfb, 0x2c, 0x61, 0xcf, 0x82, 0x55, 0x18, 0x44, 0x09, 0xde, 0x93, 0x3d, 0x70, 0xa7, 0xea, 0x3e, 0x73, 0xa4, 0xe9, 0x47, 0x0a, 0xdd, 0x90, 0xcc, 0x81, 0x56, 0x1b, 0xb5, 0xf8, 0x2f, 0x62, 0x97, 0xda, 0x0d, 0x40, 0xee, 0xa3, 0x74, 0x39, 0x65, 0x28, 0xff, 0xb2, 0x1c, 0x51, 0x86, 0xcb, 0x21, 0x6c, 0xbb, 0xf6, 0x58, 0x15, 0xc2, 0x8f, 0xd3, 0x9e, 0x49, 0x04, 0xaa, 0xe7, 0x30, 0x7d, 0x88, 0xc5, 0x12, 0x5f, 0xf1, 0xbc, 0x6b, 0x26, 0x7a, 0x37, 0xe0, 0xad, 0x03, 0x4e, 0x99, 0xd4, 0x7c, 0x31, 0xe6, 0xab, 0x05, 0x48, 0x9f, 0xd2, 0x8e, 0xc3, 0x14, 0x59, 0xf7, 0xba, 0x6d, 0x20, 0xd5, 0x98, 0x4f, 0x02, 0xac, 0xe1, 0x36, 0x7b, 0x27, 0x6a, 0xbd, 0xf0, 0x5e, 0x13, 0xc4, 0x89, 0x63, 0x2e, 0xf9, 0xb4, 0x1a, 0x57, 0x80, 0xcd, 0x91, 0xdc, 0x0b, 0x46, 0xe8, 0xa5, 0x72, 0x3f, 0xca, 0x87, 0x50, 0x1d, 0xb3, 0xfe, 0x29, 0x64, 0x38, 0x75, 0xa2, 0xef, 0x41, 0x0c, 0xdb, 0x96, 0x42, 0x0f, 0xd8, 0x95, 0x3b, 0x76, 0xa1, 0xec, 0xb0, 0xfd, 0x2a, 0x67, 0xc9, 0x84, 0x53, 0x1e, 0xeb, 0xa6, 0x71, 0x3c, 0x92, 0xdf, 0x08, 0x45, 0x19, 0x54, 0x83, 0xce, 0x60, 0x2d, 0xfa, 0xb7, 0x5d, 0x10, 0xc7, 0x8a, 0x24, 0x69, 0xbe, 0xf3, 0xaf, 0xe2, 0x35, 0x78, 0xd6, 0x9b, 0x4c, 0x01, 0xf4, 0xb9, 0x6e, 0x23, 0x8d, 0xc0, 0x17, 0x5a, 0x06, 0x4b, 0x9c, 0xd1, 0x7f, 0x32, 0xe5, 0xa8 };//用于crc校验的数组 /* USER CODE END PD */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
然后我们需要对USART1_IRQHandler()函数进行修改,这里使用回调函数!!!而是直接修改的中断服务函数。
void USART1_IRQHandler(void) { /* USER CODE BEGIN USART1_IRQn 0 */ static uint8_t state = 0;//状态位 static uint8_t crc = 0;//校验和 static uint8_t cnt = 0;//用于一帧12个点的计数 uint8_t temp_data; /* USER CODE END USART1_IRQn 0 */ HAL_UART_IRQHandler(&huart1); /* USER CODE BEGIN USART1_IRQn 1 */ if (__HAL_UART_GET_FLAG(&huart1, UART_FLAG_RXNE) != RESET) //接收到数据 { temp_data = (uint8_t)(huart1.Instance->DR & 0xFF); //if(state == 1)receive_cnt = temp_data; __HAL_UART_CLEAR_FLAG(&huart1, UART_FLAG_RXNE); if (state > 5) { if(state < 42) { if(state%3 == 0)//一帧数据中的序号为6,9.....39的数据,距离值低8位 { Pack_Data.point[cnt].distance = (uint16_t)temp_data; state++; crc = CrcTable[(crc^temp_data) & 0xff]; } else if(state%3 == 1)//一帧数据中的序号为7,10.....40的数据,距离值高8位 { Pack_Data.point[cnt].distance = ((uint16_t)temp_data<<8)+Pack_Data.point[cnt].distance; state++; crc = CrcTable[(crc^temp_data) & 0xff]; } else//一帧数据中的序号为8,11.....41的数据,置信度 { Pack_Data.point[cnt].intensity = temp_data; cnt++; state++; crc = CrcTable[(crc^temp_data) & 0xff]; } } else { switch(state) { case 42: Pack_Data.end_angle = (uint16_t)temp_data;//结束角度低8位 state++; crc = CrcTable[(crc^temp_data) & 0xff]; break; case 43: Pack_Data.end_angle = ((uint16_t)temp_data<<8)+Pack_Data.end_angle;//结束角度高8位 state++; crc = CrcTable[(crc^temp_data) & 0xff]; break; case 44: Pack_Data.timestamp = (uint16_t)temp_data;//时间戳低8位 state++; crc = CrcTable[(crc^temp_data) & 0xff]; break; case 45: Pack_Data.timestamp = ((uint16_t)temp_data<<8)+Pack_Data.timestamp;//时间戳高8位 state++; crc = CrcTable[(crc^temp_data) & 0xff]; break; case 46: Pack_Data.crc8 = temp_data;//雷达传来的校验和 if(Pack_Data.crc8 == crc)//校验正确 { data_process();//接收到一帧且校验正确可以进行数据处理 receive_cnt++;//输出接收到正确数据的次数 } else { //校验不正确 } //memset(&Pack_Data,0,sizeof(Pack_Data)*);//清零 crc = 0; state = 0; cnt = 0;//复位 default: break; } } } else { switch(state) { case 0: if(temp_data == HEADER)//头固定 { Pack_Data.header = temp_data; state++; crc = CrcTable[(crc^temp_data) & 0xff];//开始进行校验 } else state = 0,crc = 0; break; case 1: //receive_cnt = temp_data; if(temp_data == VERLEN)//测量的点数,目前固定 { //receive_cnt++; Pack_Data.ver_len = temp_data; state++; crc = CrcTable[(crc^temp_data) & 0xff]; } else state = 0,crc = 0; break; case 2: Pack_Data.temperature = (uint16_t)temp_data;//温度低8位,一共16位ADC,0--4096,无量纲 state++; crc = CrcTable[(crc^temp_data) & 0xff]; break; case 3: Pack_Data.temperature = ((uint16_t)temp_data<<8)+Pack_Data.temperature;//温度高8位 state++; crc = CrcTable[(crc^temp_data) & 0xff]; break; case 4: Pack_Data.start_angle = (uint16_t)temp_data;//开始角度低8位,放大了100倍 state++; crc = CrcTable[(crc^temp_data) & 0xff]; break; case 5: Pack_Data.start_angle = ((uint16_t)temp_data<<8)+Pack_Data.start_angle; state++; crc = CrcTable[(crc^temp_data) & 0xff]; break; default: break; } } } /* USER CODE END USART1_IRQn 1 */ }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
最后我们只需要定义数据处理函数就可以:
/* USER CODE BEGIN 1 */ void data_process(void)//数据处理函数,完成一帧之后可进行数据处理 { //计算距离 static uint8_t cnt = 0; uint8_t i; static uint16_t count = 0; static uint32_t sum = 0; for(i=0;i<12;i++)//12个点取平均 { if(Pack_Data.point[i].distance != 0)//去除0的点 { count++; sum += Pack_Data.point[i].distance; } } if(++cnt == 100)//100个数据帧计算一次距离 { distance = sum/count; sum = 0; count = 0; cnt = 0; } } /* USER CODE END 1 */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
回到主循环进行距离的打印即可:
while (1)
{
printf("1--%d次\n",receive_cnt);
printf("1--%dmm\n",distance);
HAL_Delay(100);
}
- 1
- 2
- 3
- 4
- 5
- 6
总结
本文只简述了配置和代码修改并未对具体函数进行讲解。其官方提供的是标准库,需要标准库的直接找官方资料就可。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/代码探险家/article/detail/755515
推荐阅读
相关标签

