
热门标签
热门文章
- 1pm2 在不同的操作系统下开机启动node服务_苹果系统pm2怎么重新启动
- 2超简单的Android圆形进度条_android 圆形进度条
- 3等保2.0流程标准最全解读_2023年等保二级需要多少钱?_等保 2.0 认证 价格
- 4Java泛型的初步认识与使用_泛型通配符来接收返回的数据
- 52023年Redis面试题(持续更新)
- 6基于FPGA的卷积神经网络加速器_余子健_同一卷积窗口内部并行
- 7Navicat16安装破解教程
- 8基于Segment-and-Track Anything与ProPainter实现视频一键目标移除与一键祛除水印_propainter部署
- 9Spark面试整理-如何在Spark中进行数据清洗和转换?
- 10打死也要学的VUE.js(中文官方文档)_vue文档
当前位置: article > 正文
鱼香ROS 一键安装
作者:你好赵伟 | 2024-04-20 00:07:04
赞
踩
鱼香ros
前言
新手在ubuntu安装ros可能会出现各种错误,容易打击初学者的积极性;这边推荐最强ros安装–鱼香ros!!!
一键安装配置
wget http://fishros.com/install -O fishros && . fishros
- 1
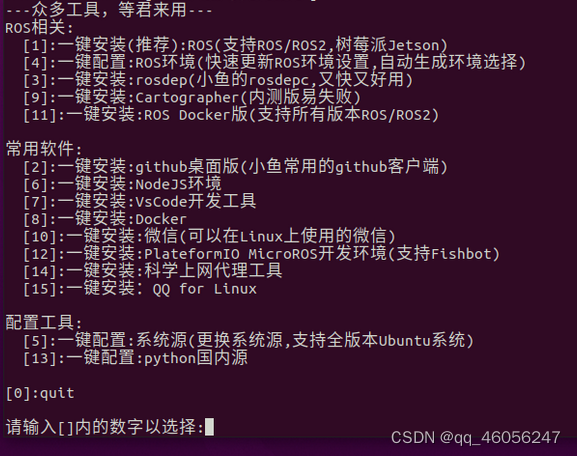
第一步:“5" :配置系统源
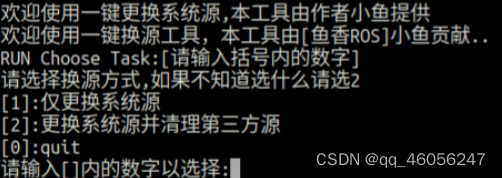 第二步: ”2“ :更换系统源并清理第三方源
第二步: ”2“ :更换系统源并清理第三方源
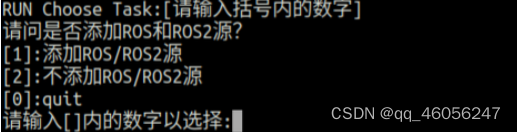 第三步 :”1“ –> 不更换源安装 –> 选择你ubuntu版本对应的ros版本 –> 进行安装
第三步 :”1“ –> 不更换源安装 –> 选择你ubuntu版本对应的ros版本 –> 进行安装
二、配置rosdep
wget http://fishros.com/install -O fishros && . fishros
- 1
“3” :一键配置
三、更新系统环境
仍是运行上述指令,输入4进行配置更新
四、验证ros是否安装成功
1.命令行运行ros
roscore
- 1
最后出现 [/rosout]
2.新启两个命令行窗口,分别输入:
rosrun turtlesim turtlesim_node
- 1
rosrun turtlesim turtle_teleop_key
- 1
在第三个终端,可以通过按下键盘的 ↑ ↓ ← →键来控制小海龟,即安装完成。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/你好赵伟/article/detail/454314
推荐阅读

相关标签

