
- 1学习腾讯的NLP文本分类_nlp的roi
- 2【LeetCode之MySQL】175. Combine Two Tables_mysql 175. combine two tables
- 3JMeter 接口自动化测试的最佳实践
- 4Python酷库之旅-比翼双飞情侣库(04)
- 5二、Crazepony1无人机源码分析-(5)50Hz循环_无人机源代码
- 6android的危险权限(dangerous)授权_android 危险权限
- 7智能算法挑战赛小学组全年级——模拟考试_全国青少年信息素养大赛智能算法应用挑战赛初赛试题
- 8如何开发一个车牌识别,车牌识别系统,车辆识别系统毕业设计毕设作品_车牌识别系统开发
- 9搭建Hadoop报错汇总(那些曾经踩过的坑)_hdfs namenode -format bash: hdfs: command not foun
- 10Image recognition&NLP_图像分割置信度
STM32F103 移植FreeRTOS (附FreeRTOS源码和移植工程)_freertos f103源码
赞
踩
前言
该篇环境为:STM32F103ZET6、Keil 库函数版本
F4、F7、H7移植同理。
FreeRTOS源码:
链接:https://pan.baidu.com/s/10l8TmseEJKkFdwFY3qZc1Q?pwd=8uqw
提取码:8uqw
- 1
- 2
1. 移植FreeRTOS
- 选取平时编程的一个库函数工程进行移植。
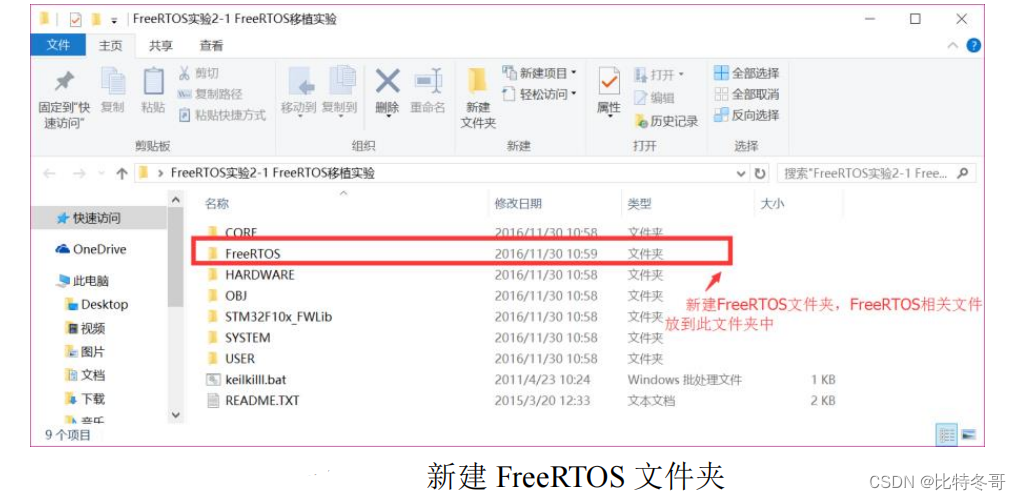
在基础工程中新建一个名为 FreeRTOS 的文件夹,如下图所示:
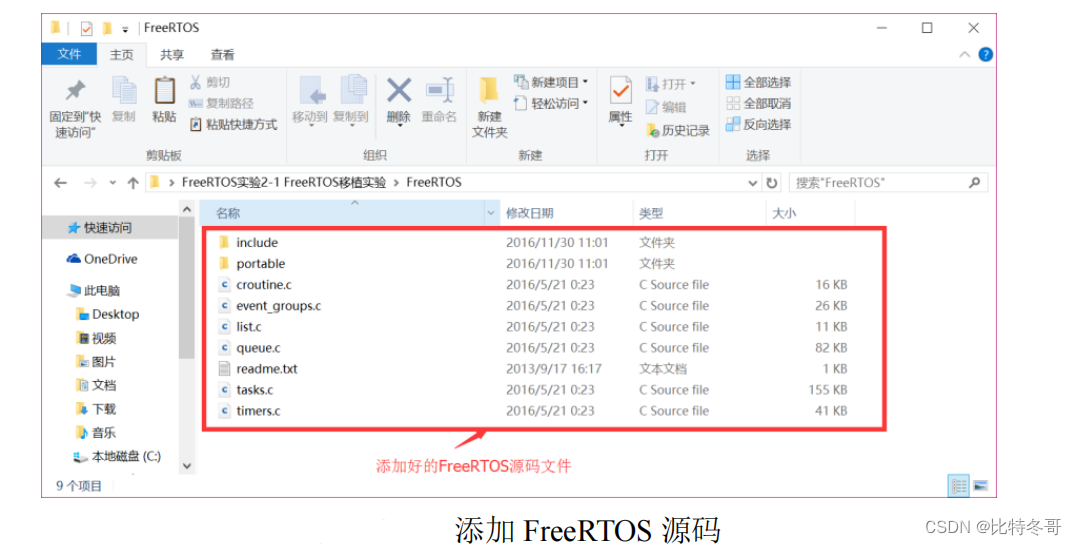
- 创建 FreeRTOS 文件夹以后就可以将 FreeRTOS 的源码添加到这个文件夹中,添加完以后如下图所示:
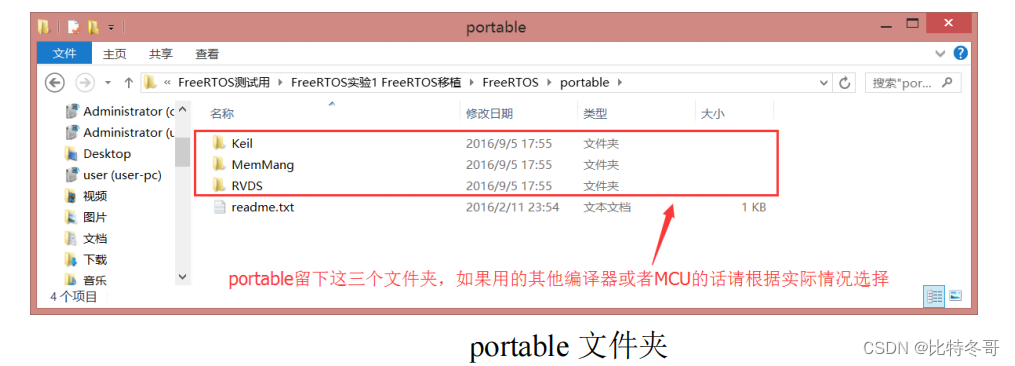
- portable 文件夹,我们只需要留下 keil、MemMang 和 RVDS
这三个文件夹,其他的都可以删除掉,完成以后如下图所示:
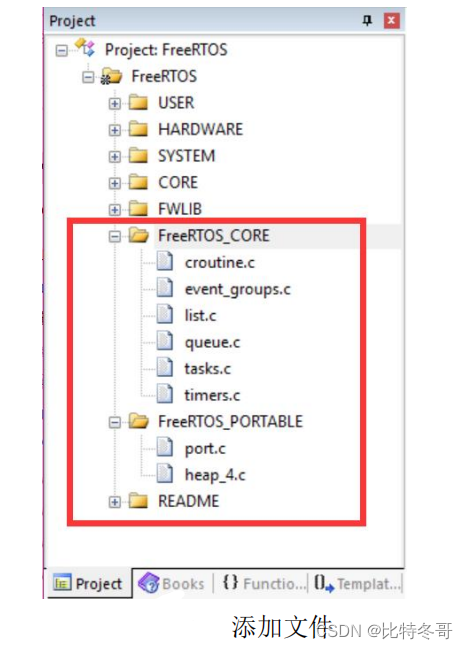
- 向工程分组中添加文件打开基础工程,新建分组 FreeRTOS_CORE 和 FreeRTOS_PORTABLE,然后向这两个分组中添加文件,如下图所示:
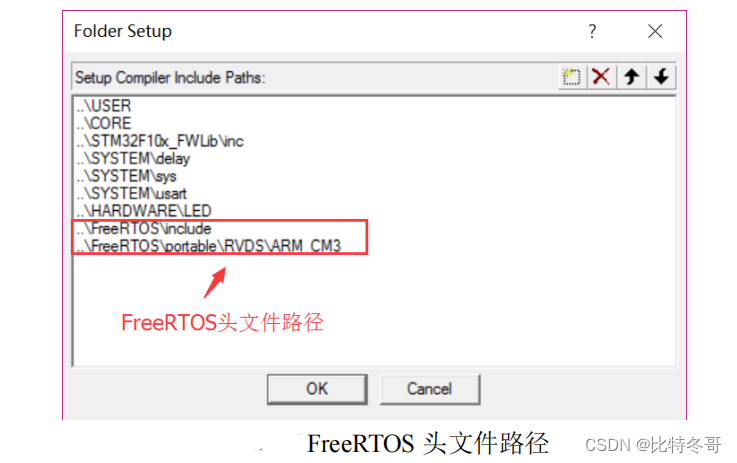
- 添加相应的头文件路径
添加完 FreeRTOS 源码中的 C 文件以后还要添加 FreeRTOS 源码的头文件路径,头文件路径如下图所示:
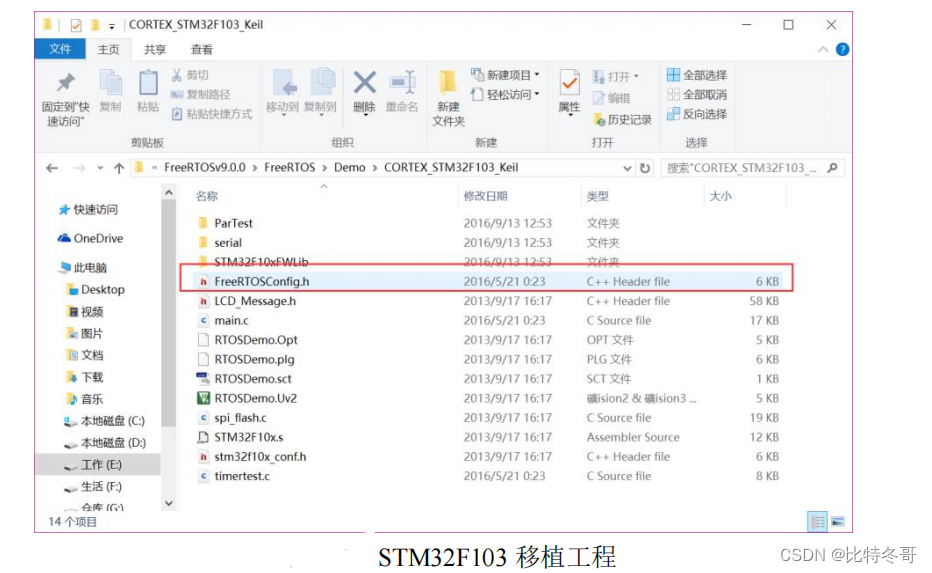
- 添加FreeRTOSConfig.h
- 修改SYSTEM文件
①修改 sys.h 文件
在 sys.h 文件里面用宏 SYSTEM_SUPPORT_OS 来定义是否使用 OS,
我们使用了 FreeRTOS,所以应该将宏 SYSTEM_SUPPORT_OS 改为 1。
//0,不支持 os
//1,支持 os
#define SYSTEM_SUPPORT_OS 1 //定义系统文件夹是否支持 OS
- 1
- 2
- 3
②修改 usart.c 文件
usart.c 文件有两部分要修改,一个是添加 FreeRTOS.h 头文件,
默认是添加的 UCOS 中的 includes.h 头文件,修改以后如下:
//如果使用 os,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "FreeRTOS.h" //os 使用
#endif
- 1
- 2
- 3
- 4
另外一个就是 USART1 的中断服务函数,在使用 UCOS 的时候进出中断的时候需要添加OSIntEnter()和 OSIntExit(),使用 FreeRTOS 的话就不需要了,所以将这两行代码删除掉,修改以后如下:
void USART1_IRQHandler(void) //串口 1 中断服务程序 { u8 Res; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) { Res =USART_ReceiveData(USART1); //读取接收到的数据 if((USART_RX_STA&0x8000)==0) //接收未完成 { if(USART_RX_STA&0x4000) //接收到了 0x0d { if(Res!=0x0a)USART_RX_STA=0; //接收错误,重新开始 else USART_RX_STA|=0x8000; //接收完成了 } else //还没收到 0X0D { if(Res==0x0d)USART_RX_STA|=0x4000; else { USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ; USART_RX_STA++; if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0; } } } } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
③修改 delay.c 文件
delay.c 文件修改的就比较大,因为涉及到 FreeRTOS 的系统时钟,delay.c 文件里面有 4个函数,先来看一下函数 SysTick_Handler(),此函数是滴答定时器的中断服务函数,代码如下:
extern void xPortSysTickHandler(void);
//systick 中断服务函数,使用 OS 时用到
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
xPortSysTickHandler();
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
FreeRTOS 的心跳就是由滴答定时器产生的,根据 FreeRTOS 的系统时钟节拍设置好滴答定时器的周期,这样就会周期触发滴答定时器中断了。在滴答定时器中断服务函数中调用FreeRTOS 的 API 函数 xPortSysTickHandler()。
delay_init()是用来初始化滴答定时器和延时函数,代码如下:
//初始化延迟函数 //SYSTICK 的时钟固定为 AHB 时钟,基础例程里面 SYSTICK 时钟频率为 AHB/8 //这里为了兼容 FreeRTOS,所以将 SYSTICK 的时钟频率改为 AHB 的频率! //SYSCLK:系统时钟频率 void delay_init() { u32 reload; SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK);//选择外部时钟 HCLK fac_us=SystemCoreClock/1000000; //不论是否使用 OS,fac_us 都需要使用 reload=SystemCoreClock/1000000; //每秒钟的计数次数 单位为 M reload*=1000000/configTICK_RATE_HZ; //根据 configTICK_RATE_HZ 设定溢出 //时间 reload 为 24 位寄存器,最大值: //16777216,在 72M 下,约合 0.233s 左右 fac_ms=1000/configTICK_RATE_HZ; //代表 OS 可以延时的最少单位 SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //开启 SYSTICK 中断 SysTick->LOAD=reload; //每 1/configTICK_RATE_HZ 秒中断一次 SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启 SYSTICK }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
前面我们说了 FreeRTOS 的系统时钟是由滴答定时器提供的,那么肯定要根据 FreeRTOS 的系统时钟节拍来初始化滴答定时器了,delay_init()就是来完成这个功能的。FreeRTOS 的系统时钟节拍由宏 configTICK_RATE_HZ 来设置,这个值我们可以自由设置,但是一旦设置好以后我们就要根据这个值来初始化滴答定时器,其实就是设置滴答定时器的中断周期。在基础例程中
滴答定时器的时钟频率设置的是 AHB 的 1/8,这里为了兼容 FreeRTOS 将滴答定时器的时钟频率改为了 AHB,也就是 72MHz!这一点一定要注意!
接下来的三个函数都是延时的,代码如下:
//延时 nus //nus:要延时的 us 数. //nus:0~204522252(最大值即 2^32/fac_us@fac_us=168) void delay_us(u32 nus) { u32 ticks; u32 told,tnow,tcnt=0; u32 reload=SysTick->LOAD; //LOAD 的值 ticks=nus*fac_us; //需要的节拍数 told=SysTick->VAL; //刚进入时的计数器值 while(1) { tnow=SysTick->VAL; if(tnow!=told) { //这里注意一下 SYSTICK 是一个递减的计数器就可以了. if(tnow<told)tcnt+=told-tnow; else tcnt+=reload-tnow+told; told=tnow; if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出. } }; } //延时 nms,会引起任务调度 //nms:要延时的 ms 数 //nms:0~65535 void delay_ms(u32 nms) { if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行 { if(nms>=fac_ms) //延时的时间大于 OS 的最少时间周期 { vTaskDelay(nms/fac_ms); //FreeRTOS 延时 } nms%=fac_ms; //OS 已经无法提供这么小的延时了, //采用普通方式延时 } delay_us((u32)(nms*1000)); //普通方式延时 } //延时 nms,不会引起任务调度 //nms:要延时的 ms 数 void delay_xms(u32 nms) { u32 i; for(i=0;i<nms;i++) delay_us(1000); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
delay_us()是 us 级延时函数,delay_ms 和 delay_xms()都是 ms 级的延时函数,delay_us()和delay_xms()不会导致任务切换。delay_ms()其实就是对 FreeRTOS 中的延时函数 vTaskDelay()的简单封装,所以在使用 delay_ms()的时候就会导致任务切换。
delay.c 修改完成以后编译一下,会提示如下图所示错误:
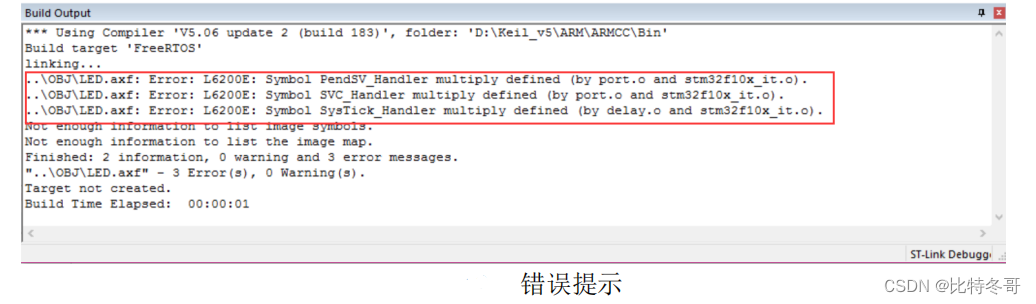
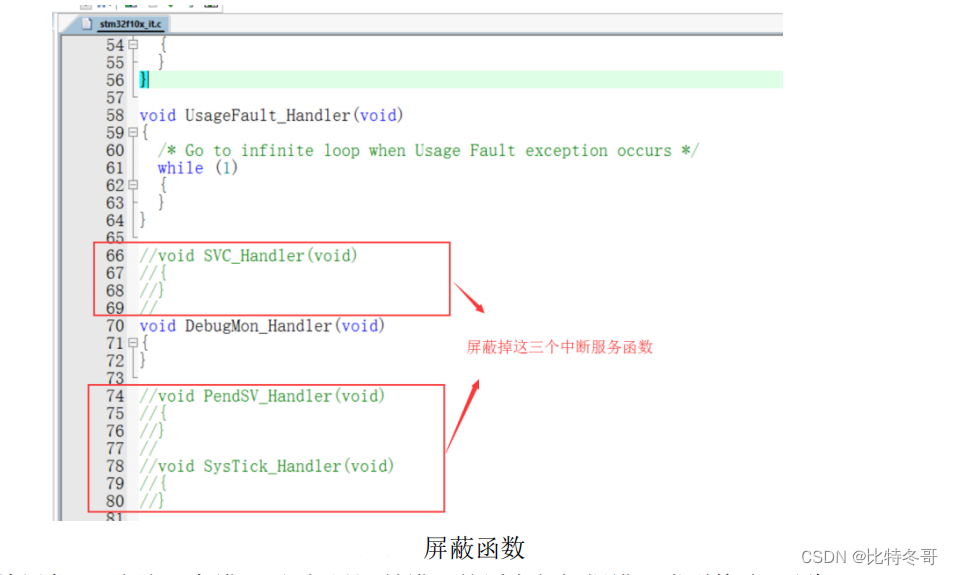
上图的错误提示表示在 port.c、delay.c 和 stm32f10x_it.c 中三个重复定义的函数:SysTick_Handler()、SVC_Handler()和 PendSV_Handler(),这三个函数分别为滴答定时器中断服务函数、SVC 中断服务函数和 PendSV 中断服务函数,将 stm32f10x_it.c 中的三个函数屏蔽掉,如下图所示:
至此,SYSTEM文件夹就修改完成了。
2. 测试FreeRTOS
本实验设计四个任务:start_task()、led0_task ()、led1_task ()和 float_task(),这四个任务的任务功能如下:
- start_task():用来创建其他三个任务。
- led0_task ():控制 LED0 的闪烁,提示系统正在运行。
- led1_task ():控制 LED1 的闪烁。
- float_task():简单的浮点测试任务,用于测试 STM32F4 的 FPU 是否工作正常。
● 任务设置
#include "sys.h" #include "delay.h" #include "usart.h" #include "led.h" #include "FreeRTOS.h" #include "task.h" #define START_TASK_PRIO 1 //任务优先级 #define START_STK_SIZE 128 //任务堆栈大小 TaskHandle_t StartTask_Handler; //任务句柄 void start_task(void *pvParameters); //任务函数 #define LED0_TASK_PRIO 2 //任务优先级 #define LED0_STK_SIZE 50 //任务堆栈大小 TaskHandle_t LED0Task_Handler; //任务句柄 void led0_task(void *p_arg); //任务函数 #define LED1_TASK_PRIO 3 //任务优先级 #define LED1_STK_SIZE 50 //任务堆栈大小 TaskHandle_t LED1Task_Handler; //任务句柄 void led1_task(void *p_arg); //任务函数
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
● main()函数
int main(void) { NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组 4 delay_init(); //延时函数初始化 uart_init(115200); //初始化串口 LED_Init(); //初始化 LED //创建开始任务 xTaskCreate((TaskFunction_t )start_task, //任务函数 (const char* )"start_task", //任务名称 (uint16_t )START_STK_SIZE, //任务堆栈大小 (void* )NULL, //传递给任务函数的参数 (UBaseType_t )START_TASK_PRIO, //任务优先级 (TaskHandle_t* )&StartTask_Handler); //任务句柄 vTaskStartScheduler(); //开启任务调度 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
● 任务函数
//开始任务任务函数 void start_task(void *pvParameters) { taskENTER_CRITICAL(); //进入临界区 //创建 LED0 任务 xTaskCreate((TaskFunction_t )led0_task, (const char* )"led0_task", (uint16_t )LED0_STK_SIZE, (void* )NULL, (UBaseType_t )LED0_TASK_PRIO, (TaskHandle_t* )&LED0Task_Handler); //创建 LED1 任务 xTaskCreate((TaskFunction_t )led1_task, (const char* )"led1_task", (uint16_t )LED1_STK_SIZE, (void* )NULL, (UBaseType_t )LED1_TASK_PRIO, (TaskHandle_t* )&LED1Task_Handler); vTaskDelete(StartTask_Handler); //删除开始任务 taskEXIT_CRITICAL(); //退出临界区 } //LED0 任务函数 void led0_task(void *pvParameters) { while(1) { LED0=~LED0; vTaskDelay(500); } } //LED1 任务函数 void led1_task(void *pvParameters) { while(1) { LED1=0; vTaskDelay(200); LED1=1; vTaskDelay(800); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
测试代码中创建了 3 个任务:LED0 测试任务、LED1 测试任务和浮点测试任务,它们的任务函数分别为:led0_task()、led1_task()。led0_task()和 led1_task()任务很简单,就是让 LED0 和LED1 周期性闪烁。
3. 移植工程
链接:https://pan.baidu.com/s/15LhxGXTk2i4gcQ2ElNk-qQ?pwd=xck4
提取码:xck4
- 1
- 2

