
- 1Flink集群安装和部署_flink 集群安装部署
- 2jenkins自动化部署(node服务器)_jenkins配置node
- 3【包邮送书】你好!Python_你好!python 全彩印刷
- 4从gitee上拉取项目至本地、本地项目上传gitee_gitee拉取的项目不会加载本地仓库
- 52024年春国家开放大学《马克思主义基本原理概论-试卷C》大作业答案
- 6OpenStack云计算基础架构平台搭建(国基北盛):第一篇_openstack云平台搭建
- 7SystemVerilog学习(0)——目录与传送门_systemverilog目录
- 8苹果电脑打不开U盘 苹果电脑不显示u盘怎么回事 mac优惠代码2020_mac u盘显示
- 9用Python历时十多天完成的全国所有区县经纬度采集_沿路采集经纬度
- 10【Leetcode栈与队列 232. 用栈实现队列】C++ 「重要基础」
Zigbee物联网应用与开发复习汇总(附某高校期末真题试卷)_zigbee习题集 pdf
赞
踩
一、知识梳理
1. Zigbee、蓝牙、IEEE802.11b(WiFi)标准都是工作在2.4G频段的无线通信标准;Zigbee主要用在短距离无线控制系统,传输少量的控制信息;
2. 短距离无线网络主要分为:无线局域网(WLANs)和无线个域网(WPANs)
3. 无线个域网所对应的通信协议:
HR-WPANS:802.15.3
MR-WPANS:蓝牙
LR-WPANS(低速率无线个域网):802.15.4
4. Zigbee最大传输速率: 250kbps。 ZigBee可工作在2.4GHz(全球流行)、868MHz(欧洲流行) 和915 MHz(美国流行)3个频段上,分别具有最高250kbit/s、20kbit/s和40kbit/s的传输速率,它的传输距离在10-75m的范围内, 但可以继续增加 。
5. Zigbee无线网络分层: 物理层(PHY) 介质访问控制(MAC)网络层(NWK)应用程序支持子层(APS) 应用层(APL)
其中802.15.4 定义了物理层和介质访问控制层;Zigbee协议定义了网络层、应用程序支持子层和应用层
6. Zigbee特点:(自组网)
高可靠性: 采取了碰撞避免策略;MAC层采用了完全确认的数据传输模式;
低成本、低功耗 : ZigBee模块的复杂度不高,ZigBee协议免专利费,再加之使用的频段无需付费,所以它的成本较低;ZigBee的传输速率低,发射功率仅为1mW,而且采用了休眠模式,功耗低
高安全 : 采用高级加密标准(AES 128) 的对称密码;
低数据速率
7. Zigbee设备类型:
协调器(ZC Coordinator):主要负责无线网络的建立与维护;(每个ZigBee网络必须有一个)
路由器(ZR Router):主要负责无线网络的路由;( (1)允许其他网络设备加入 (2)多跳路由 (3)协助电池供电的子节点通信(4)自己作为终端节点应用)
终端节点(ZED End-device):主要负责无线网络数据的采集。(1)向路由节点传递数(2)没有路由功能(3)低功耗(Zigbee的低功耗主要体现在这里)(4)可选择睡眠与唤醒。(路由因不断转发数据需电源供电,终端节点电池供电))
8. Zigbee工作在ISM(工业、科学和医疗)频带,共规定了27个信道:
2.4GHz频段 共16个信道,通信速率为250kbps
915MHz频段 共10个信道,通信速率为40kbps
896MHz频段 共1个信道,通信速率为20kbps
9. Zigbee网络拓扑结构: 星型;网络型;簇状;
10. Zigbee应用为: 周期性 ;反复; 间断数据采集应用;
11. Zigbee模块开发一般包括两个文件:.h头文件和.c文件
.h文件可理解为一份接口描述文件;
.c文件主要功能是对.h文件中声明的外部函数进行具体实现。
12. 网络中传输的三类数据:
周期性数据:如家庭中水、电、气三表数据的传输;
间断性数据:如电灯、家用电器的控制等数据的传输;
反复性的低反应时间的数据:如鼠标、操作杆传输的数据。
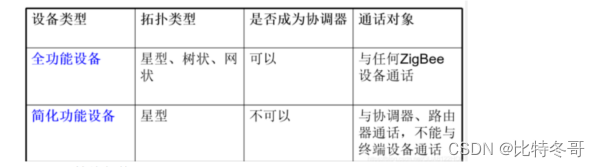
13. ZigBee设备分类
全功能设备(FFD): 可以担任网络协调者,形成网络,让其它的FFD或是精简功能装置(RFD)连结,FFD具备控制器的功能,可提供信息双向传输。
~附带由标准指定的全部 802.15.4 功能和所有特征
~更多的存储器、计算能力可使其在空闲时起网络路由器作用。
~也能用作终端设备
精简功能设备(RFD): RFD只能传送信息给FFD或从FFD接收信息。
~附带有限的功能来控制成本和复杂性
~在网络中通常用作终端设备。
~ZigBee相对简单的实现自然节省了费用。RFD由于省掉了内存和其他电路,降低了ZigBee部件的成本,而简单的8位处理器和小协议栈也有助于降低成本。
Zigbee设备类型与角色对应关系
14. ZigBee协议架构
① 物理层功能: PHY层由射频收发器以及底层的控制模块构成;
(1)激活和休眠射频收发器;
(2)信道能量检测(energy detect);
(3) 检测接收数据包的链路质量指示(link quality indication , LQI);
(4)空闲信道评估(clear channel assessment, CCA);
(5)收发数据。
② 数据链路层功能: MAC子层为高层访问物理信道提供点到点通信的服务接口
(1)协调器产生并发送信标帧,普通设备根据协调器的信标帧与协议器同步;
(2)支持PAN网络的关联(association)和取消关联(disassociation)操作;
(3)支持无线信道通信安全;
(4)使用CSMA-CA(载波侦听多路访问/冲突避免)机制访问信道;
(5)支持时槽保障(guaranteed time slot, GTS)机制;
(6)支持不同设备的MAC层间可靠传输。
③ 网络层功能:
(1)ZigBee网络层的主要功能就是提供一些必要的函数,确保ZIgBee的MAC层(IEEE 802.15.4-2003)正常工作,并且为应用层提供合适的服务接口。为了向应用层提供其接口,网络层提供了两个必须的功能服务实体,它们分别为数据服务实体和管理服务实体。
(2)网络层数据实体(NLDE)通过网络层数据服务实体服务接入点(NLDE-SAP)提供数据传输服务;
(3)网络层管理实体(NLME)通过网络层管理实体服务接入点(NLME-SAP)提供网络管理服务。网络层管理实体利用网络层数据实体完成一些网络的管理工作,并且,网络层管理实体完成对网络信息库(NIB)的维护和管理。
④应用会聚层功能: 该层主要负责把不同的应用映射到ZigBee网络上,具体而言包括:
(1)安全与鉴权
(2)多个业务数据流的会聚
(3)设备发现
(4)服务发现
15. TCP/IP结构对应OSI结构

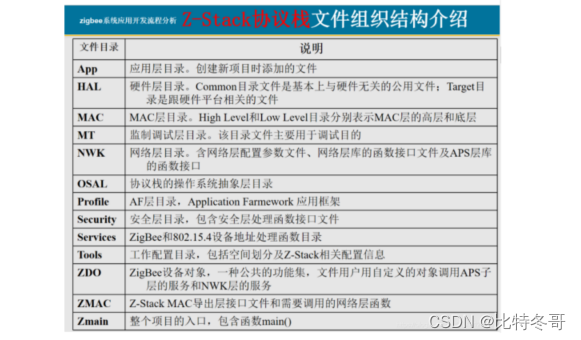
16. Z-Stack协议栈文件组织结构介绍
17. 设备地址:
64位IEEE地址:长地址又称 MAC地址或 扩展地址(全球唯一)
16位网络地址:短地址 又称逻辑地址(协调器地址为0x0000,其他设备入网时由协调器分配)(1)在网络中标识不同设备;(2)在网络数据传输时指定目的地址和源地址;
18. 网络地址: 唯一标示网络中的一个节点(用网络地址来区分不同的节点);(P135)
19. 网络地址最多可以分配65536个节点,地址分配取决于整个网络的架构,整个网络的架构由一下3个值决定:
1、网络最大深度
2、每个父节点拥有的孩子节点最大数目
3、每个父节点拥有的孩子节点路由器的最大数目
同一父节点相连的终端节点的网络地址是连续的
同一父节点相连的路由器节点的网络地址通常是不连续的
20. 端口: 每个节点上最多支持240(1-240)个端口,每个节点上的所有端口共用一个发射/接收天线(用端口来区分同一节点的端口);
21. PANID: Zigbee网络号 可手动设置(或自动随机生成),如果指定的PANID被占用则自动加1。
~PANID范围是0X0001----0XFFFF;
~可以通过给不同的网络指定不同的网络ID号来区分网络,避免干扰;
~如果设置为0XFFFF,那么协调器则随机产生一个值作为自己的PANID;
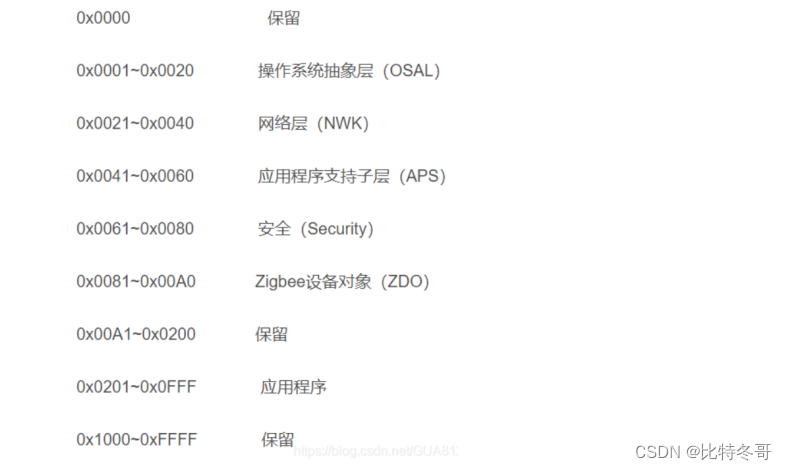
非易失性闪存条目ID号(NV操作用到的ID则定义在0x0201~0x0FFF 范围内!)
二、编程实战
- 利用定时器中断实现LED1大约每隔4秒闪烁一次(自由运行模式,模模式,正计数/倒计数模式分别实现)。
- 定时器1和定时器3分别控制LED1(模模式)和LED2(正计数/倒计数模式)以不同频率闪烁,LED1大约5秒闪烁一次,LED2大约2秒闪烁一次。
#include <ioCC2530.h> #define uint unsigned int #define uchar unsigned char #define uint32 unsigned long #define led1 P0_0 #define led2 P2_0 uint counter=0; uint counter1=0; void LED_Init() { P0SEL &=~0X01; //0000 0001 P0DIR |=0X01; P2SEL &=~0X01; //0000 0001 P2DIR |=0X01; } void TIM1_Init() { CLKCONCMD&=~0X7f; //晶振设置为32MHz while(CLKCONSTA & 0x40); //等待晶振稳定 EA=1; //开总中断 T1IE=1; //开T1溢出中断 //T1CTL=0x09; //0000 1001启动设32分频,设自由模式 //T1CTL=0x0A; //0000 1010启动设32分频,设模模式 //T1CC0H=0X30; //30D4=12500 //T1CC0L=0XD4; //T1CCTL0|=0x04; //开启通道0的输出比较模式 T1CTL=0x0B; //0000 1011启动设32分频,设正/倒计数模式 T1CC0H=0X30; //30D4=12500 T1CC0L=0XD4; led1=1; led2=0; } /* void TIM3_Init() { T3IE=1; T3CTL=0XBC; //T3启动,设32分频,设自由模式 } */ void TIM3_Init() { T3IE=1; T3CTL=0XBF; //T3启动,设32分频,设正/倒计数模式 T3CC0=255; } void main() { LED_Init(); TIM1_Init(); TIM3_Init(); while(1) { } } #pragma vector = T1_VECTOR __interrupt void LED1(void) { IRCON=0x00; //if(counter <76) // 自由模式5s //if(counter <61) // 自由模式4s //if(counter <320) // 模模式4s if(counter <160) //倒计数模式4s { counter++; }else{ counter=0; led1=!led1; } } #pragma vector = T3_VECTOR __interrupt void LED2(void) { IRCON=0x00; //if(counter1 <7812) // 自由模式 2s if(counter1 <3906) // 正/倒计数模式 2s { counter1++; }else{ counter1=0; led2=!led2; } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
1.当串口接收到来自串口调试助手发送来的0x01时改变LED2 状态,并发送"welcome"
2.通过定时器和串口协调配合,每隔6秒向PC发送 “everything is ok”
3.实验平台通过串口向PC串口发送字符串“What is your name?”,计算机向平台发送名字,名字的以#号结束,实验平台向串口发送字符串“HELLO”+名字。
*4. 编程实现,串口如果收到”LED11#”,打开LED1,如果收到”LED12#”,关闭LED1; 串口如果收到”LED21#”,打开LED2,如果收到”LED22#”,关闭LED2。
#include <iocc2530.h> #include <string.h> #define uint unsigned int #define uchar unsigned char //定义控制灯的端口 #define LED1 P1_0 #define LED2 P2_0 void LED_Init(); void initUART0(void); void InitialAD(void); void UartTX_Send_String(uchar *Data,int len); void delay(void); uchar Recdata1[10]="Hello\n"; uchar Recdata[10]="Welcome\n"; uchar RXTXflag = 1; uchar temp=0; uint datanumber = 0; uint stringlen; /**************************************************************** 串口发送字符串函数 ****************************************************************/ void UartTX_Send_String(uchar *Data,int len) { int j; for(j=0;j<len;j++) { U0DBUF = *Data++; while(UTX0IF == 0); UTX0IF = 0; } } void LED_Init() { P0SEL &=~0X01; P0DIR |=0X01; P2SEL &=~0X01; P2DIR |=0X01; LED1=1; LED2=1; } void delay(void) { int i = 0,j = 0; for(i = 0;i < 1000;i++) for(j = 0;j < 500;j++); } /**************************************************************** 初始化串口0函数 ****************************************************************/ void initUART0(void) { CLKCONCMD &= ~0x40; //设置系统时钟源为32MHZ晶振 while(CLKCONSTA & 0x40); //等待晶振稳定 CLKCONCMD &= ~0x47; //设置系统主时钟频率为32MHZ PERCFG = 0x00; //位置1 P0口 P0SEL = 0x3c; //P0用作串口 P2DIR &= ~0XC0; //P0优先作为UART0 U0CSR |= 0x80; //串口设置为UART方式 U0GCR |= 11; U0BAUD |= 216; //波特率设为115200 UTX0IF = 1; //UART0 TX中断标志初始置位1 U0CSR |= 0X40; //允许接收 IEN0 |= 0x84; //开总中断,接收中断 } /**************************************************************** 主函数 ****************************************************************/ void main(void) { LED_Init(); initUART0(); while(1) { if(RXTXflag == 1) //接收状态 { if(temp!=0) { LED2=!LED2; UartTX_Send_String(Recdata,10); UartTX_Send_String("\n",1); RXTXflag = 3; //进入发送状态 } temp = 0; } if(RXTXflag == 3) //发送状态 { U0CSR &= ~0x40; //不能收数 U0CSR |= 0x40; //允许接收 RXTXflag = 1; //恢复到接收状态 } } } /**************************************************************** 串口接收一个字符:一旦有数据从串口传至CC2530,则进入中断,将接收到的数据赋值给变量temp. ****************************************************************/ #pragma vector = URX0_VECTOR __interrupt void UART0_ISR(void) { URX0IF = 0; //清中断标志 temp = U0DBUF; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
#include <iocc2530.h> #include <string.h> #define uint unsigned int #define uchar unsigned char //定义控制灯的端口 #define LED1 P1_0 #define LED2 P2_0 void LED_Init(); void initUART0(void); void InitialAD(void); void UartTX_Send_String(uchar *Data,int len); void delay(void); uchar Recdata1[10]="Hello\n"; uchar Recdata[10]="Welcome\n"; uchar RXTXflag = 1; uchar temp=0; uint datanumber = 0; uint stringlen; int counter=0; /**************************************************************** 串口发送字符串函数 ****************************************************************/ void UartTX_Send_String(uchar *Data,int len) { int j; for(j=0;j<len;j++) { U0DBUF = *Data++; while(UTX0IF == 0); UTX0IF = 0; } } void TIM1_Init() { CLKCONCMD&=~0X7f; //晶振设置为32MHz while(CLKCONSTA & 0x40); //等待晶振稳定 EA=1; //开总中断 T1IE=1; //开T1溢出中断 T1CTL=0x09; //0000 1001启动设32分频,设自由模式 } void LED_Init() { P0SEL &=~0X01; P0DIR |=0X01; P2SEL &=~0X01; P2DIR |=0X01; LED1=1; LED2=1; } void delay(void) { int i = 0,j = 0; for(i = 0;i < 1000;i++) for(j = 0;j < 500;j++); } /**************************************************************** 初始化串口0函数 ****************************************************************/ void initUART0(void) { CLKCONCMD &= ~0x40; //设置系统时钟源为32MHZ晶振 while(CLKCONSTA & 0x40); //等待晶振稳定 CLKCONCMD &= ~0x47; //设置系统主时钟频率为32MHZ PERCFG = 0x00; //位置1 P0口 P0SEL = 0x3c; //P0用作串口 P2DIR &= ~0XC0; //P0优先作为UART0 U0CSR |= 0x80; //串口设置为UART方式 U0GCR |= 11; U0BAUD |= 216; //波特率设为115200 UTX0IF = 1; //UART0 TX中断标志初始置位1 U0CSR |= 0X40; //允许接收 IEN0 |= 0x84; //开总中断,接收中断 } /**************************************************************** 主函数 ****************************************************************/ void main(void) { LED_Init(); initUART0(); TIM1_Init(); while(1) { } } /**************************************************************** 串口接收一个字符:一旦有数据从串口传至CC2530,则进入中断,将接收到的数据赋值给变量temp. ****************************************************************/ #pragma vector = URX0_VECTOR __interrupt void UART0_ISR(void) { URX0IF = 0; //清中断标志 temp = U0DBUF; } #pragma vector = T1_VECTOR __interrupt void Uart(void) { IRCON=0x00; if(counter <91) // 自由模式6s { counter++; }else{ LED2=0; counter=0; UartTX_Send_String("everything is ok",17); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
#include <iocc2530.h> #include <string.h> #define uint unsigned int #define uchar unsigned char //定义控制灯的端口 #define LED1 P1_0 #define LED2 P2_0 void LED_Init(); void initUART0(void); void InitialAD(void); void UartTX_Send_String(uchar *Data,int len); void delay(void); uchar Recdata[10]="Welcome\n"; uchar RXTXflag = 1; uchar temp=0; uint datanumber = 0; uint stringlen; int counter=0; /**************************************************************** 串口发送字符串函数 ****************************************************************/ void UartTX_Send_String(uchar *Data,int len) { int j; for(j=0;j<len;j++) { U0DBUF = *Data++; while(UTX0IF == 0); UTX0IF = 0; } } void LED_Init() { P0SEL &=~0X01; P0DIR |=0X01; P2SEL &=~0X01; P2DIR |=0X01; LED1=1; LED2=1; } /**************************************************************** 初始化串口0函数 ****************************************************************/ void initUART0(void) { CLKCONCMD &= ~0x40; //设置系统时钟源为32MHZ晶振 while(CLKCONSTA & 0x40); //等待晶振稳定 CLKCONCMD &= ~0x47; //设置系统主时钟频率为32MHZ PERCFG = 0x00; //位置1 P0口 P0SEL = 0x3c; //P0用作串口 P2DIR &= ~0XC0; //P0优先作为UART0 U0CSR |= 0x80; //串口设置为UART方式 U0GCR |= 11; U0BAUD |= 216; //波特率设为115200 UTX0IF = 1; //UART0 TX中断标志初始置位1 U0CSR |= 0X40; //允许接收 IEN0 |= 0x84; //开总中断,接收中断 } /**************************************************************** 主函数 ****************************************************************/ void main(void) { initUART0(); stringlen = strlen((char *)Recdata); if(counter==0){ counter=1; UartTX_Send_String("What is your name?",19); } while(1) { if(RXTXflag == 1) //接收状态 { if( temp != 0) { if((temp!='#')&&(datanumber<50)) //’#‘被定义为结束字符,最多能接收50个字符 { Recdata[datanumber++] = temp; } else { RXTXflag = 3; //进入发送状态 } if(datanumber == 50) RXTXflag = 3; temp = 0; } } if(RXTXflag == 3) //发送状态 { UartTX_Send_String("send:",5); U0CSR &= ~0x40; //不能收数 UartTX_Send_String("Hello ",7); UartTX_Send_String(Recdata,datanumber); UartTX_Send_String("\n",1); U0CSR |= 0x40; //允许接收 RXTXflag = 1; //恢复到接收状态 datanumber = 0; //指针归0 memset(Recdata, 0, sizeof(Recdata)); } } } /**************************************************************** 串口接收一个字符:一旦有数据从串口传至CC2530,则进入中断,将接收到的数据赋值给变量temp. ****************************************************************/ #pragma vector = URX0_VECTOR __interrupt void UART0_ISR(void) { URX0IF = 0; //清中断标志 temp = U0DBUF; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
#include <iocc2530.h> #include <string.h> #define uint unsigned int #define uchar unsigned char //定义控制灯的端口 #define LED1 P0_0 #define LED2 P2_0 void LED_Init(); void initUART0(void); void InitialAD(void); void UartTX_Send_String(uchar *Data,int len); int cnt=0; int flag=0; uchar Recdata[6]; uchar RXTXflag = 1; uchar temp=0; uint datanumber = 0; uint stringlen; int counter=0; /**************************************************************** 串口发送字符串函数 ****************************************************************/ void UartTX_Send_String(uchar *Data,int len) { int j; for(j=0;j<len;j++) { U0DBUF = *Data++; while(UTX0IF == 0); UTX0IF = 0; } } void LED_Init() { P0SEL &=~0X01; P0DIR |=0X01; P2SEL &=~0X01; P2DIR |=0X01; LED1=1; LED2=1; } /**************************************************************** 初始化串口0函数 ****************************************************************/ void initUART0(void) { CLKCONCMD &= ~0x40; //设置系统时钟源为32MHZ晶振 while(CLKCONSTA & 0x40); //等待晶振稳定 CLKCONCMD &= ~0x47; //设置系统主时钟频率为32MHZ PERCFG = 0x00; //位置1 P0口 P0SEL = 0x3c; //P0用作串口 P2DIR &= ~0XC0; //P0优先作为UART0 U0CSR |= 0x80; //串口设置为UART方式 U0GCR |= 11; U0BAUD |= 216; //波特率设为115200 UTX0IF = 1; //UART0 TX中断标志初始置位1 U0CSR |= 0X40; //允许接收 IEN0 |= 0x84; //开总中断,接收中断 } /**************************************************************** 主函数 ****************************************************************/ void main(void) { initUART0(); LED_Init(); while(1) { } } /**************************************************************** 串口接收一个字符:一旦有数据从串口传至CC2530,则进入中断,将接收到的数据赋值给变量temp. ****************************************************************/ #pragma vector = URX0_VECTOR __interrupt void UART0_ISR(void) { URX0IF = 0; Recdata[datanumber++] = U0DBUF; if(datanumber==5) { if(Recdata[0] == 'L' && Recdata[1] == 'E' && Recdata[2] == 'D'&& Recdata[3] == '1'&& Recdata[4] == '1') LED1=0; if(Recdata[0] == 'L' && Recdata[1] == 'E' && Recdata[2] == 'D'&& Recdata[3] == '1'&& Recdata[4] == '2') LED1=1; if(Recdata[0] == 'L' && Recdata[1] == 'E' && Recdata[2] == 'D'&& Recdata[3] == '2'&& Recdata[4] == '1') LED2=0; if(Recdata[0] == 'L' && Recdata[1] == 'E' && Recdata[2] == 'D'&& Recdata[3] == '2'&& Recdata[4] == '2') LED2=1; datanumber = 0; //memset(Recdata,0,sizeof(Recdata)); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
1.每隔10秒采集一次VDD/3的电压值并显示出来,并且当串口接收到来自串口调试助手发送来的0x01时,发送VDD/3的电压值。
*2. 每隔20秒询问一次是否有AD采集任务,若收到回复“temp sensor”则令ADC采集片内温度传感器的值并显示出来,若收到回复“vdd”则令ADC采集VDD/3的值并显示出来。
#include <iocc2530.h> #include <string.h> #include <stdio.h> #define uint unsigned int #define uchar unsigned char void initUART0(void); void UartTX_Send_String(char *Data,int len); float GetTemperature(void); int counter=0; char Temp[6]; /**************************************************************** 串口发送字符串函数 ****************************************************************/ void UartTX_Send_String(char *Data,int len) { int j; for(j=0;j<len;j++) { U0DBUF = *Data++; while(UTX0IF == 0); UTX0IF = 0; } } void TIM1_Init() { CLKCONCMD&=~0X7f; //晶振设置为32MHz while(CLKCONSTA & 0x40); //等待晶振稳定 EA=1; //开总中断 T1IE=1; //开T1溢出中断 T1CTL=0x09; //0000 1001启动设32分频,设自由模式 } float GetTemperature(void) { uint value,sum; int i; for(i=0;i<4;i++) { ADCCON3 = (0x3E); //选择1.25V为参考电压;14位分辨率;对片内温度传感器采样 ADCCON1 |= 0x30; //选择ADC的启动模式为手动 ADCCON1 |= 0x40; //启动AD转化 while(!(ADCCON1 & 0x80)); //等待 AD 转换完成 value = ADCL >> 2; //ADCL 寄存器低 2 位无效,由于他只有12位有效,ADCL寄存器低4位无效。网络上很多代码这里都是右移两位,那是不对的 value |= (((uint)ADCH) << 6); sum+=value; } value=sum>>2; return (value-1367.5)/4.5; } /**************************************************************** 初始化串口0函数 ****************************************************************/ void initUART0(void) { CLKCONCMD &= ~0x40; //设置系统时钟源为32MHZ晶振 while(CLKCONSTA & 0x40); //等待晶振稳定 CLKCONCMD &= ~0x47; //设置系统主时钟频率为32MHZ PERCFG = 0x00; //位置1 P0口 P0SEL = 0x3c; //P0用作串口 P2DIR &= ~0XC0; //P0优先作为UART0 U0CSR |= 0x80; //串口设置为UART方式 U0GCR |= 11; U0BAUD |= 216; //波特率设为115200 UTX0IF = 1; //UART0 TX中断标志初始置位1 U0CSR |= 0X40; //允许接收 IEN0 |= 0x84; //开总中断,接收中断 } /**************************************************************** 主函数 ****************************************************************/ void main(void) { initUART0(); TIM1_Init(); while(1) { } } #pragma vector = T1_VECTOR __interrupt void Uart(void) { IRCON=0x00; if(counter <15) // 自由模式1s { counter++; }else{ counter=0; float AvgTemp = GetTemperature(); memset(Temp, 0, 6); sprintf(Temp,"%.2f", AvgTemp);//将浮点数转成字符串 UartTX_Send_String(Temp,5); UartTX_Send_String(" ",10); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
无线射频收发实验
#include "ioCC2530.h" #define LED2 P2_0 static unsigned char buf[128]; static int len=0; unsigned char i; void Delay(unsigned char m) { int i=0,j=0; for(i=0;i<1000;i++) { for(j=0;j < m; j++); } } /*********************** *串口初始化 *返回参数 无 ***********************/ void initUARTtest(void) { CLKCONCMD &= ~0x40; //晶振 while(!(SLEEPSTA & 0x40)); //等待晶振稳定 CLKCONCMD &= ~0x47; //TICHSPD128分频,CLKSPD不分频 SLEEPCMD |= 0x04; //关闭不用的RC振荡器 PERCFG = 0x00; //位置1 P0口 P0SEL = 0x3c; //P0用作串口 U0CSR |= 0x80;//UART方式 U0GCR |= 10; //波特率设为57600 U0BAUD |= 216; UTX0IF = 0;//中断标志清0 U0CSR |= 0X40;//允许接收 IEN0 |= 0x84; //开总中断,接收中断 } /*************************************************/ void UartTX_Send_String(unsigned char *Data,int len) { int j; //LED2 = ~LED2; for(j=0;j<len;j++) { U0DBUF = *Data++; while(UTX0IF == 0); UTX0IF = 0; } } void rf_init() { //硬件CRC以及AUTO_ACK使能 //FRMCTRL0 |= (0x20 | 0x40); /* AUTO_ACK | AUTO_CRC */ TXFILTCFG = 0x09;//设置TX抗混叠过滤器以获得合适的带宽 AGCCTRL1 = 0x15;//调整AGC目标值 FSCAL1 = 0x00;//获得最佳的EVM RFIRQM0 |= (1<<6);// RXPKTDONE 中断位使能 IEN2 |= (1<<0);// RF 中断使能 EA = 1;//开中断 FREQCTRL = 0x0d; //信道选择,选择11信道 SHORT_ADDR0 = 0x05;//目标地址过滤期间使用的短地址 SHORT_ADDR1 = 0x00; PAN_ID0 = 0x22; //目标地址过滤期间使用的PANID PAN_ID1 = 0x00; RFST = 0xed; //清除RXFIFO缓冲区并复位解调器 RFST = 0xe3; //为RX使能并校准频率合成器 FRMFILT0 &= ~(1<<0);//禁止帧过滤 //FRMFILT0 = 0x0C; } #pragma vector=RF_VECTOR __interrupt void rf_isr(void) { unsigned char i; EA = 0; //关中断 //接收帧结束 if (RFIRQF0 & (1<<6)) { len = RFD-2;//接收帧长度 len &= 0x7f; //将接收的数据写入buf中 for (i = 0; i < len; i++) { buf[i] = RFD; //Delay(200); } RFST =0xED; //清除接收缓冲区 UartTX_Send_String(buf,len); //Uart0SendString(buf); S1CON = 0; // 清RF中断 RFIRQF0 &= ~(1<<6); //清 RXPKTDONE中断 LED2 = ~LED2; //LED1灯状态改变 } EA = 1; } void tx() { unsigned char i; unsigned char mac[]="hncu "; RFST = 0xe3; //为RX使能并校准频率合成器 //wait for SFD not active and TX_Active not active // TX_ACTIVE | SFD while (FSMSTAT1 & ((1<<1) | (1<<5))); RFIRQM0 &= ~(1<<6); //禁止RXPKTDONE中断 IEN2 &= ~(1<<0); //禁止RF中断 RFST = 0xee; // ISFLUSHTX RFIRQF1 = ~(1<<1);// 清除 TXDONE 中断 RFD = 8;// 传输的帧长度 //将mac的内容写到RFD中 for(i=0;i<6;i++) { RFD = mac[i]; } RFIRQM0 |= (1<<6);// 打开RX中断 IEN2 |= (1<<0);//打开RF中断 RFST = 0xe9; //发送数据包ISTXON while (!(RFIRQF1 & (1<<1)));//等待传输结束 RFIRQF1 = ~(1<<1);//清除 TXDONE状态 LED2=~LED2;//LED1灯状态改变 //Delay(200);//延时 } void main(void) { initUARTtest(); //P0DIR |= 0x01; P2DIR |= 0x01; LED2=1;//关闭LED2 EA = 0;//关闭总中断 SLEEPCMD &= ~0x04;//设置时钟频率为32M //等待时钟稳定 while(!(SLEEPSTA & 0x40)); CLKCONCMD &= ~0x47; SLEEPCMD |= 0x04; rf_init();//初始化RF EA = 1;//中断使能 //发送或等待接收中断 while(1) { //宏定义RX #ifndef RX //如果没有定义RX,开始发送 tx(); Delay(200);//延时 //Delay(200); # else //如果定义RX,等待接收断中 //UartTX_Send_String(buf,len); #endif } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
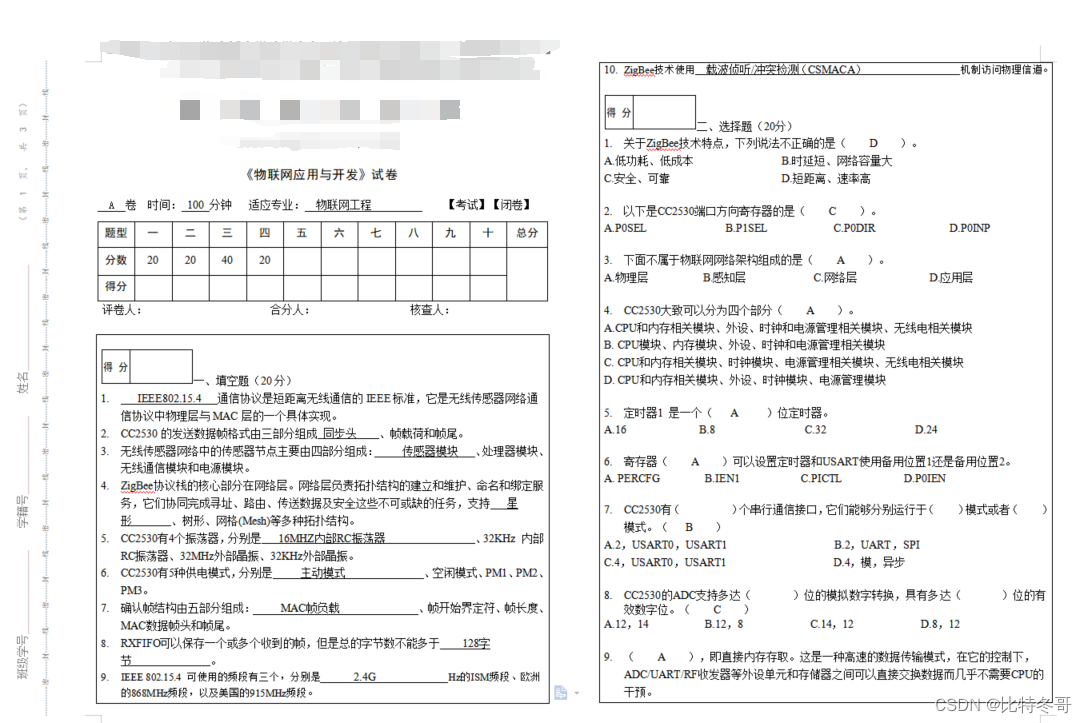
三、高校真题
A卷
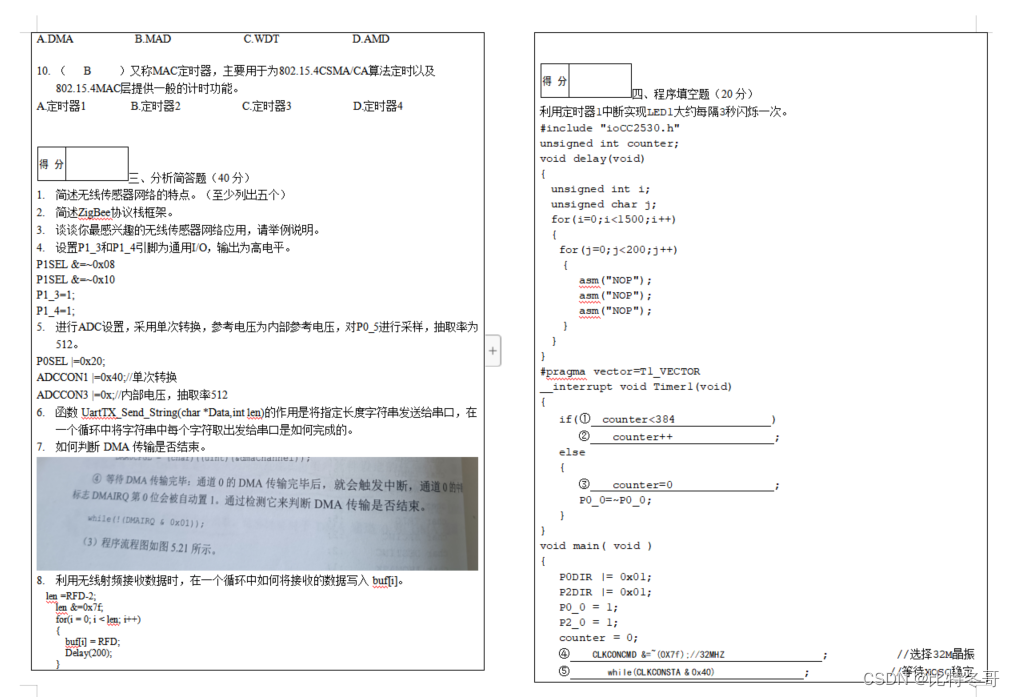
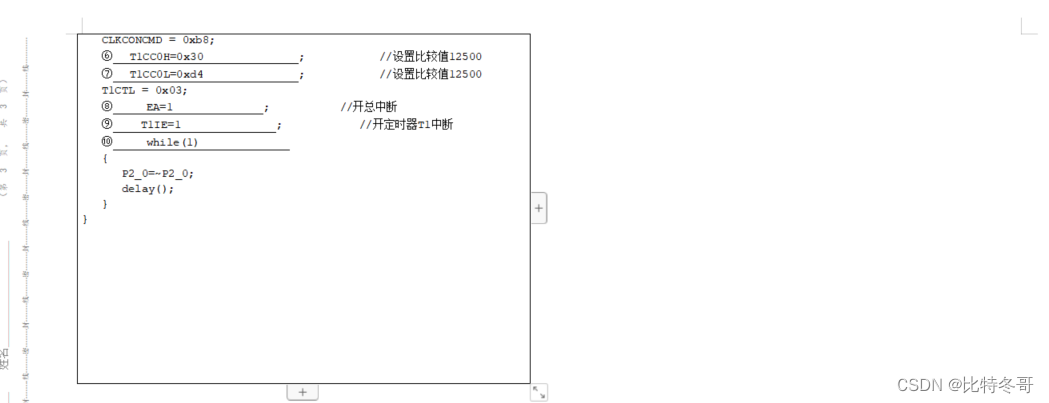
B卷
一键三连联系下方wx领取更多复习资料哦
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

