
- 1Git | Git入门,成为项目管理大师(一)_git 的作者
- 2Flink消费pubsub问题_flink pubsubsource
- 3【原创】JavaWeb仓库管理系统(Web仓库管理系统毕业设计)_java仓库管理系统
- 4java.io.FileNotFoundException: java.io.FileNotFoundException: HADOOP_HOME and hadoop.home.dir are un_windows java.io.filenotfoundexception: java.io.fil
- 5程序员的浪漫——给她专属的圣诞树_程序员给树命名
- 6使用Llamafile在本地运行LLM模型_tinyllama本地运行
- 7C语言数据结构——快速排序和归并排序_c语言数据结构快速排序
- 8HTML5 音频 Audio 标签详解_h5 audio标签
- 9Flink实现kafka到kafka、kafka到doris的精准一次消费_flink kafka doris
- 10存在 ZooKeeper 未授权访问【原理扫描】--通过防火墙策略进行修复
300行代码实现一个优雅的PyTorch Trainer_pytorch lightning的trainer 带参数实例构建
赞
踩
如果觉得下面哪部分讲的不够清楚,欢迎评论指出。
2022.5.30 更新:支持CI自动化测试,代码质量更加可靠
2022.5.29 更新:新增详细的API文档
为什么需要Trainer?
在江湖上混,没有一把趁手的兵器怎么能行。对于一个深度学习算法工程师来说,一个强大的Trainer就是趁手的兵器,在复现顶会论文的时候不用每次都要写大量的模版代码,可以更加关注模型实现本身。我平时也开源了一些深度学习项目,累计获赞400+,最近整理了一些之前的代码,也看了很多优秀的开源实现,然后从0实现了一个小而美的trainer,主要有以下两个优点吧:
- 轻量级:代码量很少,易上手也易改动。
- 可拓展:能够满足工程师各种魔改网络/训练流程的需求。

为什么不选择pytorch-lightning / detectron2 / mmcv?
现有的detectron2、mmcv、pytorch-lightning中的trainer虽然也很优雅,但是看了源码就能感受到代码中的抽象层次太多,看的有些吃力。例如下面这个文件是detectron2中保存checkpoint的代码,共594行,考虑到了很多场景,功能非常完善。
fvcore/checkpoint.py at main · facebookresearch/fvcore
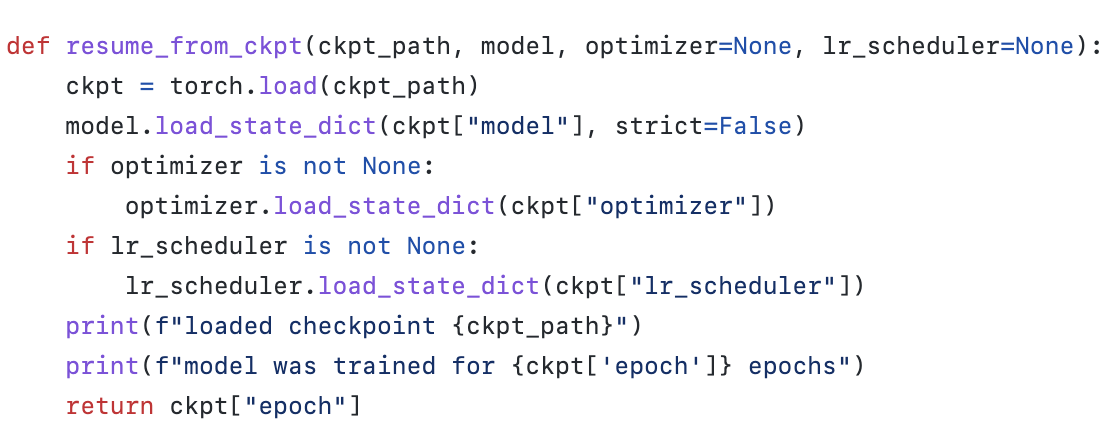
但是对于我们平时使用来说,可能需要的只是如下几行代码。
此外detectron2是基于迭代而不是基于epoch来训练的,和我平时的习惯有些许出入。mmcv虽然是基于epoch的,但是整体设计上要略微逊色于detectron2。
最重要的一点:虽然以上这些开源库提供的trainer足够强大,学会之后能满足所有需求,但是,我还是想造个轮子。一方面是实现过程中会深入思考一些工程细节,对于代码水平会有提高。另一方面是写一个trainer也不咋耗时间,最近没什么事情,一周还是拿得出来的。
代码已经放到github上了,仓库名字叫:Core-PyTorch-Utils,简称CPU。代码注释和文档都非常详细。
GitHub - serend1p1ty/core-pytorch-utils: Core components for deep learning.


里面大多数文件都不会依赖其它模块,可以直接copy作为小工具使用。下面将逐个介绍这里的每个模块。
[1/6]灵活的配置系统:config_argparse.py
一般在一个深度学习项目中,有数十上百个需要调节的参数,cpu/config_argparse.py这个文件提供了一个简易灵活的配置系统,实现细节参考自pytorch-image-models。
目前有两种比较流行的参数配置系统:
import argparse
parser = argparse.ArgumentParser()
parser.add_argument('--batch-size', type=int, default=1)
parser.add_argument('--learning-rate', type=float, default=0.001)
print(parser.parse_args())
- 1
- 2
- 3
- 4
- 5
- 利用
yacs库创建默认配置,然后从命令行传递--config-file参数来覆盖默认配置。
default_config.py保存了项目的默认配置。
from yacs.config import CfgNode as CN
_C = CN()
_C.BATCH_SIZE = 1
_C.LEARNING_RATE = 0.001
def get_default_cfg():
"""返回一个默认配置的备份,防止默认配置被修改。"""
return _C.clone()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
config.yaml为某次实验使用的配置文件,用来覆盖默认配置。
BATCH_SIZE: 5
- 1
main.py中创建一个包含 --config-file的 ArgumentParser来实现加载配置文件。
import argparse
from default_config import get_default_cfg
parser = argparse.ArgumentParser()
parser.add_argument("--config-file", help="配置文件的路径。")
parser.add_argument("opts", nargs=argparse.REMAINDER, help="通过命令行修改配置。")
args = parser.parse_args()
# 最终的配置 = 默认配置 + 配置文件
cfg = get_default_cfg()
cfg.merge_from_file(args.cfg_file)
cfg.merge_from_list(args.opts)
cfg.freeze()
print(cfg)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
然后运行 python main.py --config-file config.yaml,最终得到的配置为
BATCH_SIZE = 5
LEARNING_RATE = 0.001
- 1
- 2
如果配置文件中遗漏了一些内容,我们也可以在命令行中实时地修改配置。运行 python main.py --config-file config.yaml LEARNING_RATE 0.002,最终得到的配置为
BATCH_SIZE = 5
LEARNING_RATE = 0.002
- 1
- 2
第一种方式的缺点是无法加载 yaml配置文件,所有参数都要在命令行中输入(虽然 argparse自带 fromfile_prefix_chars特性,但不好用)。第二种方法的缺点是,一个配置系统被割裂成了两个部分, yacs部分+ argparse部分,且在命令行中通过 python main.py --help无法查看每个参数的说明(只能显示由 argparse管理的那部分参数,由 yacs管理的那部分参数则无能为力)。
因此我们的 config_argparse.py就实现了一个可以加载配置的文件的 ArgumentParser类。使用方式和 argparse完全相同,只是多了一个 --config的选项用来指定配置文件的路径。下面讲讲一些实现细节。
我们先定义了一个内部 parser用来解析用户指定的配置文件的路径。
self.config_parser.add_argument("-c", "--config", default=None, metavar="FILE",
help="where to load YAML configuration")
- 1
- 2
然后根据用户指定的配置文件覆盖相应选项的默认值。
# 先解析出用户指定的配置文件的路径,保存在res.config中 res, remaining_argv = self.config_parser.parse_known_args(args) if res.config is not None: # 加载配置文件 with open(res.config, "r") as f: config_vars = yaml.safe_load(f) # 判断配置文件中是否含有错误的键值对 for key in config_vars: if key not in self.option_names: self.error(f"unexpected configuration entry: {key}") # ----将配置文件提供的值用作默认值---- # 例如在定义某个选项的时候默认值为1,parser.add_argument("--batch-size", default=1) # 配置文件的内容为"batch_size: 2" # 那么就用配置文件提供的值覆盖该选项的默认值,即目前batch_size的默认值为2 self.set_defaults(**config_vars) # parse其余命令行参数 # 如果在命令中没有指定batch_size,那么最终的batch_size就是覆盖之后的默认值2 # 如果在命令行中指定了--batch-size=3,那么最终的batch_size就是3,因为命令行具有最高优先级! return super().parse_args(remaining_argv)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
目前我们实现的 ConfigArgumentParser类,还有一些小问题,例如:
如果指定了一个必选参数, parser.add_argument("--batch-size", required=True),且在配置文件中也已经设置了 batch_size的值,这个时候在命令行中理应不需要再设置 batch_size了。但是目前我们的实现仍然需要在命令行中指定 batch_size的值。这是因为我们将配置文件视为选项的默认值,而不是用户的实际输入值。
如果非常介意这个问题,可以选用ConfigArgParse这个库(实际上我们的实现方式就是ConfigArgParse的早期实现的简单版本)。但是在常用的深度学习系统中,我们提供的这个类已经足够了。
[2/6]将信息显示在终端和文件中:logger.py

在深度学习项目中经常需要把终端显示的内容保存到文件中,这里我们选择使用python自带的 logging模块来作为信息记录系统。
我们在 logger.py中实现了一个 setup_logger()函数,用来对 logging模块返回的 logger做了一些简单配置
- 设置终端中显示的信息的格式
- 终端信息高亮,让warning和error信息更加醒目
- 将终端显示的信息同步保存到文件中
下面是核心代码的讲解。
# 保证一个logger只会被初始化一次 if name in logger_initialized: return logger_initialized[name] # 如果name等于None,则返回的是全局的root logger # 初始化完root logger之后,所有logger的信息(除非这个logger的propagate为False)都会被传播到root logger, # 然后root logger再根据配置好的格式将消息显示在终端中。 # 所以最常见的用法就是在程序的最开始调用一次setup_logger()配置好root logger, # 然后其它所有logger都免配置直接使用。 logger = logging.getLogger(name) logger.setLevel(log_level) # 如果同时创建了子logger和父logger, # 那么子logger产生的信息会向上传递给父logger, # 终端中就会把同一段信息显示两次!因此在初始化logger的时候要设置logger.propagate=False, # 防止子logger的信息向上传递。 logger.propagate = False plain_formatter = logging.Formatter( "[%(asctime)s %(name)s %(levelname)s]: %(message)s", datefmt="%m/%d %H:%M:%S" ) # 在分布式训练中只初始化主进程的logger if rank == 0: ch = logging.StreamHandler(stream=sys.stdout) ch.setLevel(log_level) if color: # _ColorfulFormatter的功能是,如果当前信息的级别是INFO, # 那么就不展示级别,如果是WARNING、DEBUG、ERROR, # 就在信息的开头显示对应级别。这样的好处是,因为绝大多数信息都是INFO, # 这样以来可以节省空间显示更多文字。 formatter = _ColorfulFormatter( colored("[%(asctime)s %(name)s]: ", "green") + "%(message)s", datefmt="%m/%d %H:%M:%S", ) else: formatter = plain_formatter ch.setFormatter(formatter) logger.addHandler(ch) if output is not None: if output.endswith(".txt") or output.endswith(".log"): filename = output else: filename = os.path.join(output, "log.txt") # 如果单个文件名作为参数传递,则os.path.dirname将返回一个空字符串。 # 例如,os.path.dirname("log.txt")== ""。这将导致os.makedirs()出错。 # 所以我们需要用绝对路径来获取目录名。 os.makedirs(os.path.dirname(os.path.abspath(filename)), exist_ok=True) fh = logging.FileHandler(filename) fh.setLevel(log_level) fh.setFormatter(plain_formatter) logger.addHandler(fh) logger_initialized[name] = logger return logger
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
[3/6]平滑显示,让loss不要再上下乱跳了:history_buffer.py
如果想在终端中输出训练过程的loss值,相信有些同学会像下面这么写:
for i, batch in enumerate(data_loader):
output = model(batch)
loss = criterion(output, label)
if i % 10 == 0:
print(f"loss: {loss.item()}")
- 1
- 2
- 3
- 4
- 5
但是这样一来输出的loss跳变很大不利于观察,可能你看到的是这样一组数字:0.5、0.8、0.3…
为了更加平滑的显示loss,我们不应该直接输出loss的当前值,而是应该输出过去一段时间内loss的平均值。假设在5次迭代中loss的值分别为0.5、0.8、0.3、0.4、0.3,窗口大小为2(我们每次输出的是过去两个迭代的loss的平均值)。
- 在第一次迭代时,loss队列如下:
0.5
- 1
数量太少,无法填满窗口,直接输出0.5
- 第二次迭代,loss队列如下,窗口为0.5和0.8。
--------
0.5 0.8
--------
- 1
- 2
- 3
因此输出窗口内的平均值0.65
- 第二次迭代,loss队列如下,窗口右移(因为窗口的含义是最近两个迭代)
--------
0.5 0.8 0.3
--------
- 1
- 2
- 3
输出窗口内的平均值0.55
- 剩下的迭代以此类推。
history_buffer中提供了一个HistoryBuffer类,可以帮助我们输出窗口内的平均值(也能输出全局平均值、全局和、最近的值)。用法如下:
loss_buffer = HistoryBuffer()
for i, batch in enumerate(data_loader):
output = model(batch)
loss = criterion(output, label)
loss_buffer.update(loss.item())
if i % 10 == 0:
print(f"loss: {loss_buffer.avg}")
- 1
- 2
- 3
- 4
- 5
- 6
- 7
pytorch-image-models中也有类似的用法,不过使用的是只能输出全局平均值的 AverageMeter。个人认为局部平均值比全局平均值更好,能够更明显地反映出当前的变化。所以不太理解为什么pytorch-image-models为什么这样做,知道的朋友烦请评论区告知。
[4/6]让PyTorch自带的lr scheduler支持warmup:lr_scheduler.py
这部分内容太长了,单独放到一篇文章中。
[5/6]巧用钩子赋予Trainer更强的可拓展性
CPU库的代码是写死的,而用户会有各种各样的需求,比如想每隔3个epoch就打印一次当前的学习率。为了给Trainer带来更强的拓展性,CPU采用了钩子(hook)机制。
我们首先定义了钩子的基类Hook,包含了几个内置的方法。以 before_epoch()为例,这个方法将在每个epoch开始之前调用。
class Hook: def before_train(self) -> None: """Called before the first iteration.""" pass def after_train(self) -> None: """Called after the last iteration.""" pass def before_epoch(self) -> None: """Called before each epoch.""" pass def after_epoch(self) -> None: """Called after each epoch.""" pass def before_iter(self) -> None: """Called before each iteration.""" pass
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
如果想要实现自定义的功能(例如每隔三个epoch保存一次模型的权重),用户可以继承这个基类。
class CheckpointHook(Hook):
def after_epoch(self):
# self.trainer是在钩子注册的时候定义的
epoch = self.trainer.epoch
if epoch % 3 == 0:
save_checkpoint()
- 1
- 2
- 3
- 4
- 5
- 6
再写一个简单的Trainer类。
class Trainer: def __init__(self): self._hooks = [] def register_hooks(self, hooks): # 将钩子注册到trainer中,实际上就是放到trainer的_hooks列表里以便后续调用 for hook in hooks: # 这里为每个钩子创建一个类变量,指向当前trainer。 # 这样就可以访问trainer内部的model、optimizer、epoch,iter等。 hook.trainer = self self._hooks.append(hook) def before_train(self): # trainer的before_train()函数就是 # 调用每个注册的hook的before_train()函数 for hook in self._hooks: hook.before_train() def after_train(self): for hook in self._hooks: hook.after_train() def before_epoch(self): for hook in self._hooks: hook.before_epoch() def after_epoch(self): for hook in self._hooks: hook.after_epoch() def before_iter(self): for hook in self._hooks: hook.before_iter() def after_iter(self): for hook in self._hooks: hook.after_iter() def train(self): self.before_train() for self.epoch in range(max_epochs): self.before_epoch() for self.iter, data in enumerate(data_loader): self.before_iter() self.train_one_iter(data) self.after_iter() self.after_epoch() self.after_train()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
然后实例化我们刚才写的 CheckpointHook类,并将其注册到 Trainer中。
ckpt_hook = CheckpointHook()
trainer = Trainer()
trainer.register_hooks([ckpt_hook])
trainer.train()
- 1
- 2
- 3
- 4
上面这些是伪代码,不能运行,只是为了方便描述钩子的原理。
[6/6]开始写 Trainer
本节我们将逐行讲解 trainer.py的内容。先来看构造函数。
class Trainer: def __init__( self, model: nn.Module, optimizer: optim.Optimizer, lr_scheduler: optim.lr_scheduler._LRScheduler, data_loader: DataLoader, max_epochs: int, work_dir: str = "work_dir", max_num_checkpoints: int = None, checkpoint_period: int = 1, log_period: int = 50, clip_grad_norm: float = 0.0, enable_amp: bool = False, # 以下是关于lr warmup的参数 by_epoch: bool = True, warmup_t: int = 0, warmup_by_epoch: bool = False, warmup_mode: str = "fix", warmup_factor: float = 0.0, ): """ Args: model (torch.nn.Module) optimizer (torch.optim.Optimizer) lr_scheduler (optim.lr_scheduler._LRScheduler) data_loader (torch.utils.data.DataLoader): 训练数据。 max_epochs (int): 训练多少个epoch。 work_dir (str): 保存checkpoint和log文件的目录,默认是"work_dir"。 max_num_checkpoints (int): 最多保存多少个checkpoint,如果是None,则保存所有的checkpoint。 checkpoint_period (int): 每隔多少个epoch保存一次checkpoint,默认是1。 log_period (int): 每隔多少次迭代输出一次log,默认是50。 clip_grad_norm (float): 梯度裁剪使用的范数阈值,如果<=0,则不使用梯度裁剪。 enable_amp (bool): 是否开启混合精度训练,默认不开启。 by_epoch, warmup_t, warmup_by_epoch, warmup_mode, warmup_factor: 参考 lr_scheduler.py的文档。 """ self.model = model self.optimizer = optimizer # 将pytorch自带的lr scheduler转化为带warmup的scheduler self.lr_scheduler = LRWarmupScheduler( torch_scheduler=lr_scheduler, by_epoch=by_epoch, epoch_len=len(data_loader), warmup_t=warmup_t, warmup_by_epoch=warmup_by_epoch, warmup_mode=warmup_mode, warmup_factor=warmup_factor) self.data_loader = data_loader self.work_dir = work_dir # 我们使用HistoryBuff来平滑训练过程中产生的指标。 # MetricStorage等下会详细讲,这里可以简单地理解成是一个字典。 # 字典的key是指标的名字,value是保存这个指标的HistoryBuffer。 self.metric_storage = MetricStorage() # 一些有用的计数器,在hook中可能会用到 self.inner_iter: int # [0, epoch_len - 1] self.epoch: int # [0, max_epochs - 1] self.start_epoch = 0 # [0, max_epochs - 1] self.max_epochs = max_epochs # 保存所有已注册的hook self._hooks: List[HookBase] = [] # 因为想记录从data_loader中加载每个batch需要的时间,所以我们 # 没有选择用for循环,而是用迭代器的方式来遍历data_loader self._data_iter = iter(data_loader) self._max_num_checkpoints = max_num_checkpoints self._checkpoint_period = checkpoint_period self._log_period = log_period self._clip_grad_norm = clip_grad_norm self._enable_amp = enable_amp # 注册一些默认的hooks self.register_hooks(self._build_default_hooks()) logger.info(f"Registered default hooks: {self.registered_hook_names}") if self._enable_amp: logger.info("Automatic Mixed Precision (AMP) training is on.") self._grad_scaler = GradScaler()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
然后我们又定义了一些有用的属性,注意这里使用了python的 @property装饰器。以 self.max_iters为例,当更改 self.max_epochs时, self.max_iters的数值也会自动改变,不需要我们手动更新。
@property def lr(self) -> float: return self.optimizer.param_groups[0]["lr"] @property def epoch_len(self) -> int: """每个epoch包含多少个iter(iteration,迭代)""" return len(self.data_loader) @property def max_iters(self) -> int: """一共需要训练多少个iter""" return self.max_epochs * self.epoch_len @property def cur_iter(self) -> int: """当前iter的索引,范围是[0, max_iters - 1]""" return self.epoch * self.epoch_len + self.inner_iter @property def start_iter(self) -> int: """训练从哪个iter开始,最小值是0""" return self.start_epoch * self.epoch_len @property def ckpt_dir(self) -> str: """保存checkpoints的目录""" return osp.join(self.work_dir, "checkpoints") @property def tb_log_dir(self) -> str: """保存tensorboard log文件的目录""" return osp.join(self.work_dir, "tb_logs") @property def model_or_module(self) -> nn.Module: if isinstance(self.model, (DistributedDataParallel, DataParallel)): return self.model.module return self.model @property def registered_hook_names(self) -> List[str]: """所有已经注册的钩子的名称""" return [h.__class__.__name__ for h in self._hooks]
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
然后是一些和钩子相关的方法。
def register_hooks(self, hooks: List[Optional[HookBase]]) -> None: hooks = [h for h in hooks if h is not None] for h in hooks: assert isinstance(h, HookBase) # 这里使用weakref是为了避免循环引用导致的内存泄漏 h.trainer = weakref.proxy(self) # LoggerHook旨在记录训练过程中产生的一些指标(模型的loss、其它钩子产生的指标) # 为了不遗漏其它钩子产生的信息,LoggerHook应该被最后执行(注册的时候放到末尾) if self._hooks and isinstance(self._hooks[-1], LoggerHook): self._hooks.insert(len(self._hooks) - 1, h) else: self._hooks.append(h) def _call_hooks(self, stage: str) -> None: """_call_hooks("before_epoch")可以调用所有钩子的before_epoch()方法""" for h in self._hooks: getattr(h, stage)() def _build_default_hooks(self) -> List[HookBase]: return [ LRUpdateHook(), # 更新学习率应该在iter结束之后立马执行,因此要放在第一位 CheckpointerHook(self._checkpoint_period, self._max_num_checkpoints), LoggerHook(self._log_period, tb_log_dir=self.tb_log_dir), ]
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
然后就是核心的训练环节。
def train(self) -> None: logger.info(f"Start training from epoch {self.start_epoch}") self._prepare_for_training() self._call_hooks("before_train") for self.epoch in range(self.start_epoch, self.max_epochs): self._call_hooks("before_epoch") self._train_one_epoch() self._call_hooks("after_epoch") self._call_hooks("after_train") def _train_one_epoch(self) -> None: # 测试hook会把模型设置为eval模式,因此这里要设置为train模式 self.model.train() for self.inner_iter in range(self.epoch_len): self._call_hooks("before_iter") self.train_one_iter() self._call_hooks("after_iter") # 这里要手动更新迭代器,不然迭代到data_loader末尾时会引发异常 self._data_iter = iter(self.data_loader) def train_one_iter(self) -> None: iter_start_time = time.perf_counter() # 1. 从data_loader中加载batch # 为了计算数据加载时间,我们选择通过迭代器读取数据,而不是"for data in data_loader" start = time.perf_counter() batch = next(self._data_iter) data_time = time.perf_counter() - start # 2. 计算loss if self._enable_amp: with autocast(): loss_dict = self.model(batch) else: loss_dict = self.model(batch) if isinstance(loss_dict, torch.Tensor): losses = loss_dict loss_dict = {"total_loss": loss_dict} else: losses = sum(loss_dict.values()) # 3. 计算梯度 self.optimizer.zero_grad() if self._enable_amp: self._grad_scaler.scale(losses).backward() else: losses.backward() if self._clip_grad_norm > 0: if self._enable_amp: self._grad_scaler.unscale_(self.optimizer) clip_grad_norm_(self.model.parameters(), self._clip_grad_norm) # 4. 更新模型权重 if self._enable_amp: self._grad_scaler.step(self.optimizer) self._grad_scaler.update() else: self.optimizer.step() # 记录此次迭代产生的各项指标 self._log_iter_metrics(loss_dict, data_time, time.perf_counter() - iter_start_time, self.lr)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
接下来详细讲讲 Trainer中如何自动记录训练过程中产生的各项指标。首先回顾一下 HistoryBuffer的功能,如果内容为
--------
0.5 0.8 0.3
--------
- 1
- 2
- 3
HistoryBuffer同时提供了 avg()方法用来获得窗口内的平均值0.55,和 latest()方法获得最新的数值0.3。
随着训练的进行,会把每次迭代的指标保存到字典 metric_storage中。假设已经进行了3次迭代,此时 metric_storage的内容为
"loss":
--------
0.5 0.8 0.3
--------
"lr":
---------
0.1 0.1 0.08
---------
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
LoggerHook会每隔几个iter来从 metric_storage中取出各项指标的值,并打印至终端。此时对于需要平滑的指标"loss", LoggerHook打印的是 metric_storage["loss"].avg,对于不需要平滑的指标"lr",打印的是 metric_storage["lr"].latest。
那么 LoggerHook又该如何知道哪个指标需要平滑呢?这就需要我们在更新 metric_storage的时候指定一个 smooth参数,如果 smooth为True代表该指标需要平滑,否则不需要。
metric_storage.update(loss=loss_value, smooth=True)
metric_storage.update(lr=lr_value, smooth=False)
- 1
- 2
我们没有采用简单的字典,而是设计了 MetricStorage类,就是为了可以自动确定哪些指标需要平滑。 MetricStorage的代码如下。
class MetricStorage(dict): """该类在训练过程中存储多个度量的值(其中一些可能有噪声,例如损失、批处理时间),并提 供对平滑值的访问,以便更好地记录。 该类是为自动记录指标而设计的。用户在调用update()方法时应该指定smooth参数, 以便可以确定在执行日志记录时应该平滑哪些指标。 Example:: >>> metric_storage = MetricStorage() >>> metric_storage.update(iter=0, loss=0.2) >>> metric_storage.update(iter=0, lr=0.01, smooth=False) >>> metric_storage.update(iter=1, loss=0.1) >>> metric_storage.update(iter=1, lr=0.001, smooth=False) >>> # loss将会被平滑, 但lr不会 >>> metric_storage.values_maybe_smooth {"loss": (1, 0.15), "lr": (1, 0.001)} >>> # 类似于字典,可以直接用字符串索引 >>> metric_storage["loss"].avg 0.15 """ def __init__(self, window_size: int = 20) -> None: self._window_size = window_size self._history: Dict[str, HistoryBuffer] = self self._smooth: Dict[str, bool] = {} self._latest_iter: Dict[str, int] = {} def update(self, iter: Optional[int] = None, smooth: bool = True, **kwargs) -> None: """添加在特定迭代中生成的多个指标的数值。 Args: iter (int): 这些数值是在哪个迭代生成的。如果为None,则使用内置的从0开始的计数器。 smooth (bool): 如果为True,则在调用values_maybe_smooth()时返回这些指标的平滑值。 否则,返回最新的值。在对update()的不同调用中,同一指标必须具有相同的smooth参数值. """ for key, value in kwargs.items(): if key in self._smooth: assert self._smooth[key] == smooth else: self._smooth[key] = smooth self._history[key] = HistoryBuffer(window_size=self._window_size) self._latest_iter[key] = -1 if iter is not None: assert iter > self._latest_iter[key] self._latest_iter[key] = iter else: self._latest_iter[key] += 1 self._history[key].update(value) @property def values_maybe_smooth(self) -> Dict[str, Tuple[int, float]]: """返回平滑值或最新值。具体行为取决于更新指标时的smooth参数。""" return { key: (self._latest_iter[key], his_buf.avg if self._smooth[key] else his_buf.latest) for key, his_buf in self._history.items() }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
在每次迭代结束时,我们都使用 _log_iter_metrics()函数来记录本次迭代产生的一些信息。
def log(self, *args, **kwargs) -> None: """调用metric_storage字典的update函数""" self.metric_storage.update(*args, **kwargs) def _log_iter_metrics(self, loss_dict: Dict[str, torch.Tensor], data_time: float, iter_time: float, lr: float) -> None: """ Args: loss_dict (dict): 模型产生的损失,默认是一个字典,{"loss1": 0.5, "loss2": 0.6}. data_time (float): 从data_loader中加载batch需要的时间. iter_time (float): 完成一次iter需要的时间. lr (float): 本次迭代使用的学习率. """ self.log(self.cur_iter, data_time=data_time, iter_time=iter_time) self.log(self.cur_iter, lr=lr, smooth=False) loss_dict = {k: v.detach().cpu().item() for k, v in loss_dict.items()} loss_value = sum(loss_dict.values()) if not np.isfinite(loss_value): raise FloatingPointError( f"Loss became infinite or NaN at epoch={self.epoch}! loss_dict = {loss_dict}." ) self.log(self.cur_iter, total_loss=loss_value) if len(loss_dict) > 1: self.log(self.cur_iter, **loss_dict)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
总结
感谢诸位读者的时间,你们的阅读让我的创作有了意义。断断续续这么久,终于更新完了。文章只能挑一些重点来讲,不可避免的会遗漏一些细节。感兴趣的朋友可以去github中查看完整的最新代码,欢迎批评指正+点赞fork!
路漫漫其修远,希望CPU这个库能在日后的工作学习中陪着我一起披荆斩棘,炼出有用的丹药。

