
热门标签
热门文章
- 1基于SpringBoot3引入Redis并封装常用的操作RedisUtils_springboot redisutil
- 2阿里校招开始啦!阿里巴巴-淘天集团-猫超-供应链-开发&;测试
- 3创建React-Native 项目_yarn react native
- 4leetcode-没有重复项的全排列-97
- 5SpringBoot系列——防重放与操作幂等_springboot 重放
- 6前方危险:MySQL UPDATE 语句的非标准实现_mysql update 不符合标准
- 7Flutter入门-Flutter配置_flutter支持的最低安卓版本
- 8LORA模型原理详解+分层控制使用
- 9基于同步压缩小波变换(Synchrosqueezed wavelet transforms)的时频分析和时频脊线提取的纯C语言实现姊妹篇(基于FFTW库)
- 10【云原生】Containerd ctr 和 crictl 客户端命令介绍与实战操作(nerdctl )_crictl tag
当前位置: article > 正文
毫米波雷达心率、呼吸检测原理 TI mmWave Labs —— Driver Vital Signs_毫米波雷达检测人体原理
作者:小小林熬夜学编程 | 2024-05-05 02:01:27
赞
踩
毫米波雷达检测人体原理
毫米波雷达心率、呼吸检测原理
1. 概述
- 普通成年人的心跳、呼吸的位移、频率参数如下:
| Frome Front | Frome Back | ||
|---|---|---|---|
| Vital Signs | Frequency | Amplitude | Amplitude |
| Breathing Rate (Adults) | 0.1 – 0.5 Hz | ~ 1- 12 mm | ~ 0.1 – 0.5 mm |
| Heart Rate (Adults) | 0.8 – 2.0 Hz | ~ 0.1 – 0.5 mm | ~ 0.01 – 0.2 mm |
- 基本原理
通过探测由于目标微小振动所引起的在特定的Range bin的FMCW信号的相位变化。
Δ ϕ b = 4 π λ Δ R \Delta \phi_b=\frac{4\pi}{\lambda} \Delta R Δϕb=λ4πΔR
式中, Δ ϕ b \Delta \phi_b Δϕb 为相位变化, Δ R \Delta R ΔR为心脏或胸腔引起的位移变化。
2 FMCW 雷达基础原理
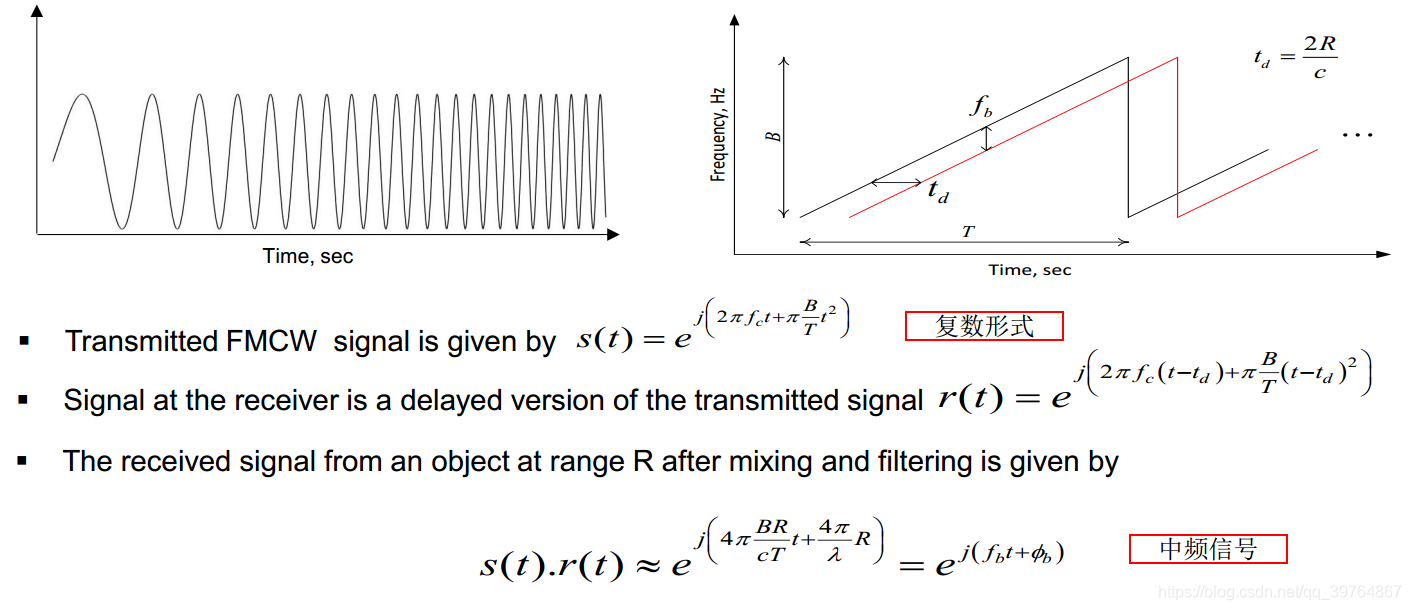
通过相位的变化去计算心跳、呼吸的频率,将发射信号以及混频后的中频信号系写为了复数形式,主要关注其相位的变化。
3 信号测量
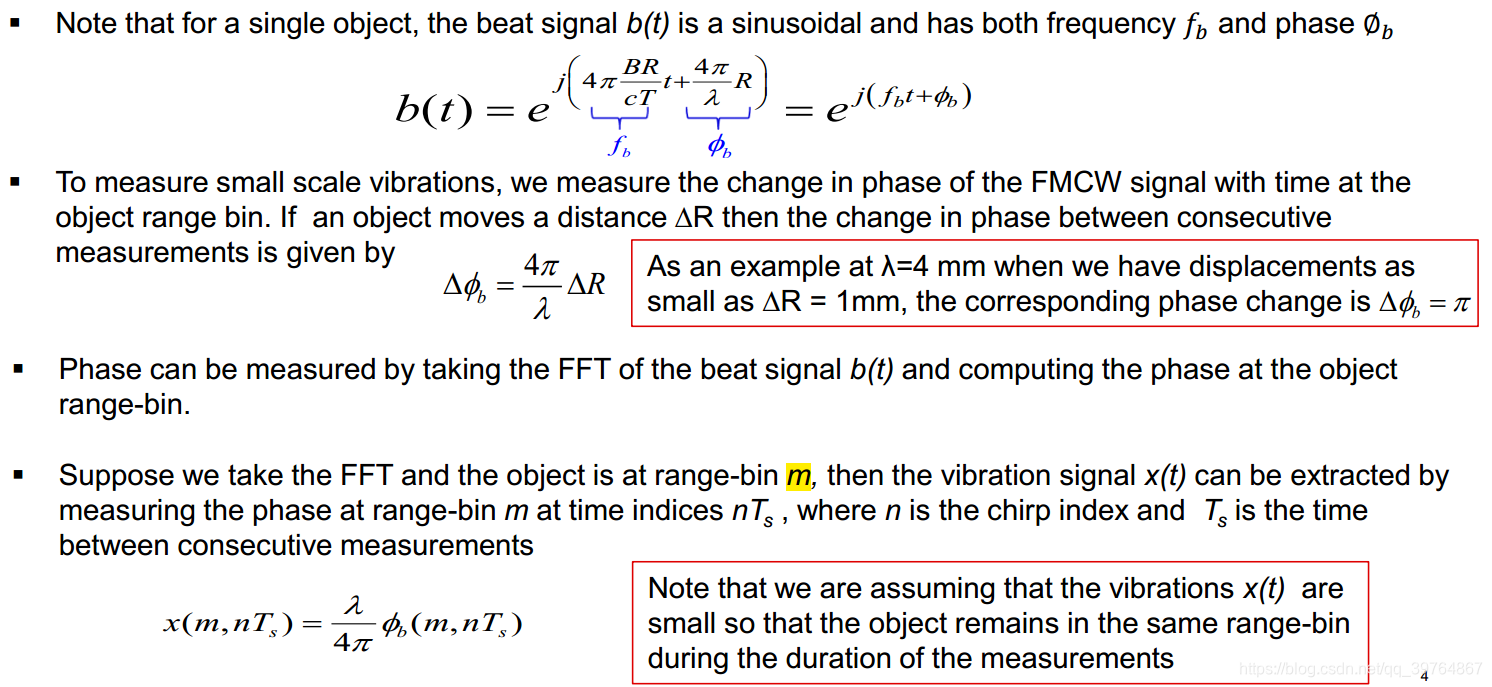
- 对于单个目标,心跳信号可看作一个同时具有频率和相位的正弦信号 b ( t ) b(t) b(t)
- 为测量小幅度的振动,需要得到目标其Range bin里的相位变化 Δ ϕ b \Delta \phi_b Δϕb;
- 通过目标距离bin里对 b ( t ) b(t) b(t)信号做FFT,可得到其目标相位;
- 假设目标距离为 m m m,进行FFT变换,提取距离为 m m m的 R a n g e b i n Range bin Rangebin处的振动信号,
- 假设我们进行了FFT,并且对象位于 R a n g e b i n Range bin Rangebin为m处,则可以通过在nTs时间内连续提取Range bin为 m处的相位来获取振动信号 x ( t ) x(t) x(t),其中n是chirp的索引,Ts是连续测量的时间。
4 波形配置
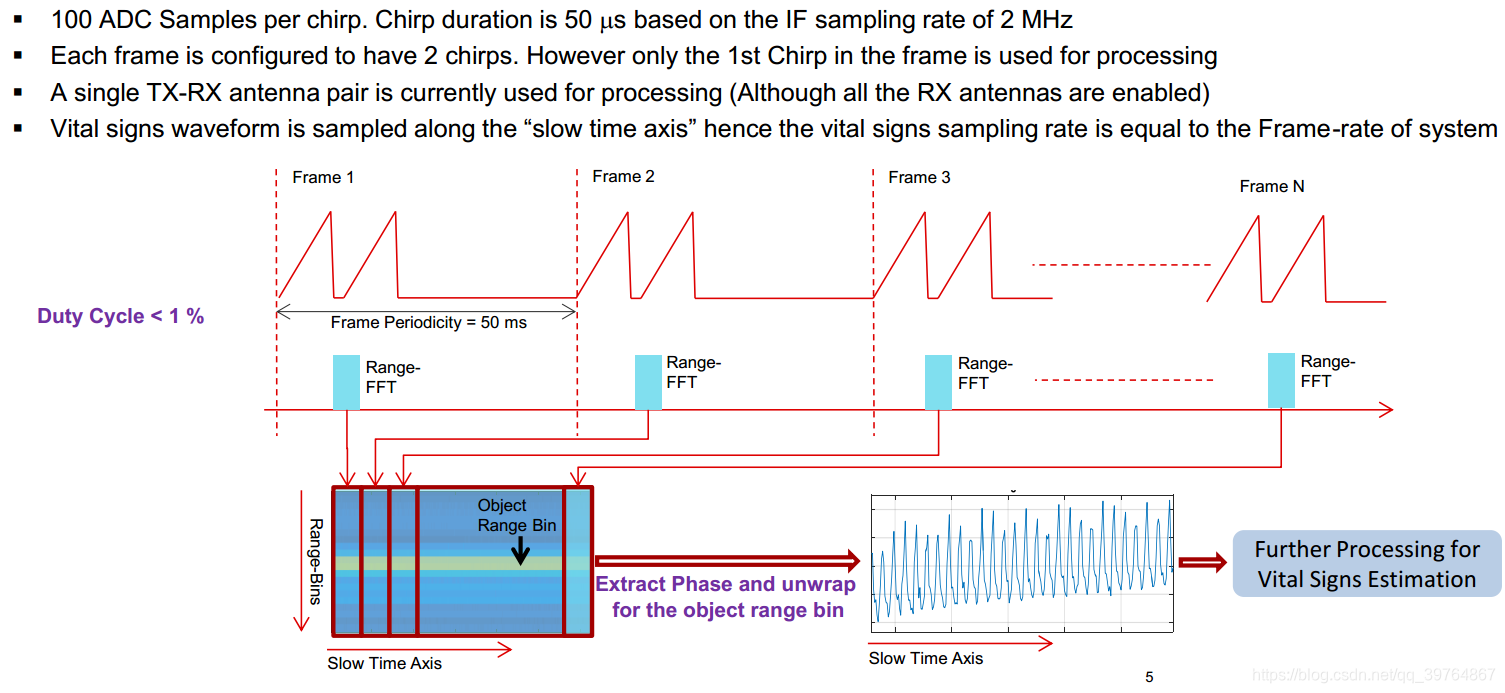
- 每个Chirp进行100次ADC采样,每个Chirp的持续时间为50 μ s \mu s μs,IF采样频率为2MHz;
- 每帧发射两个Chirp,每帧的周期为50 m s ms ms;
- 目前仅使用单发单收的天线布局;
- 生命体征波形沿“慢时间轴”采样,因此生命体征采样率等于系统的帧率;(即每一帧内,仅采一次样,通过连续的N帧得到心率、呼吸的相位变化)
5 算法流程
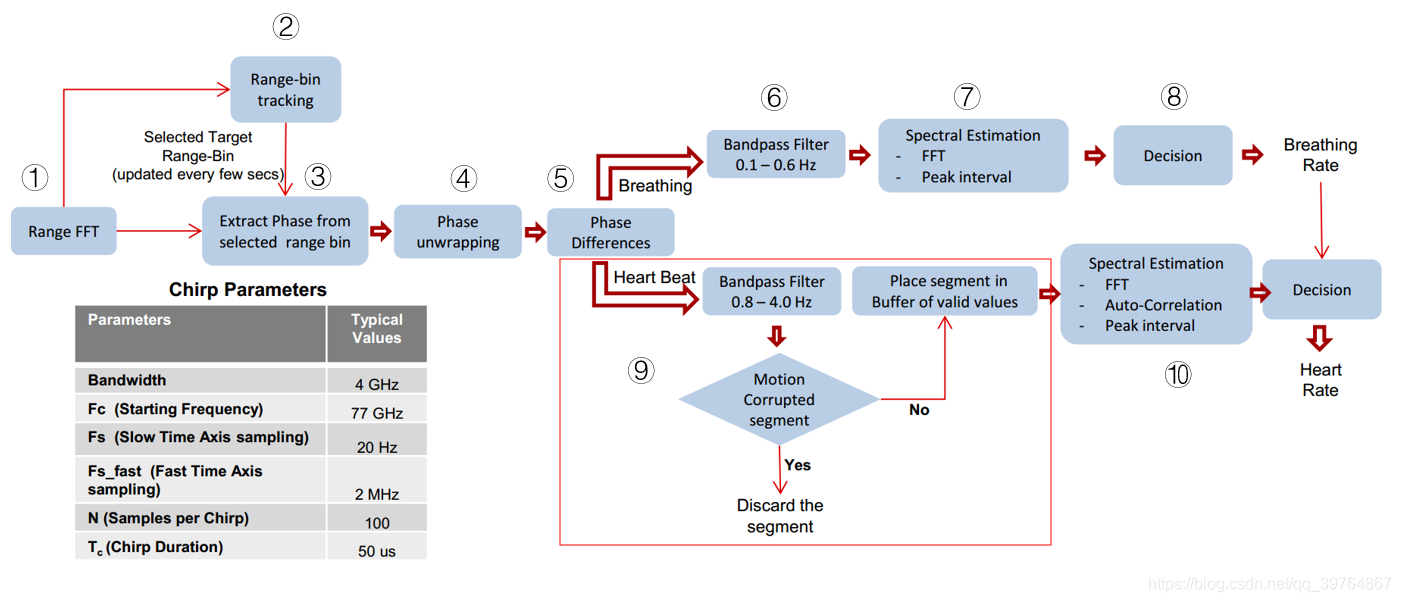
- Range FFT :对ADC数据执行快速傅立叶变换(FFT)以获取Range曲线;
- Range bin tracking:通过雷达的与人体的大致位置关系,可以确定目标的距离范围,通过在该范围内搜索最大值,获取目标对应的Range bin;
- Extract Phase:提取目标Range bin 处的相位;
① ② ③ 三个阶段循环,帧周期是50ms,即每一个帧周期内提取一次目标的相位,若目标与距离的径向距离发生变化,则需要根据Range bin tracking算法得出此时的Rang bin ,然后提取相位,循环发射N帧,即可得到目标的相位随帧数的取值变化,也可看作目标相位与时间的关系,记做振动信号 x ( t ) x(t) x(t)
- Phase Unwrapping:相位解缠绕,由于相位值在 [ − π , π ] [-π,π] [−π,π]之间,而我们需要展开以获取实际的位移曲线。 因此每当连续值之间的相位差大于/小于±π时,通过从相位中减去2π来执行相位展开;
- Phase Difference :通过减去连续的相位值,对展开的相位执行相位差运算。 这有助于增强心跳信号并消除任何相位漂移;
- Bandpass Filtering 依据心跳和呼吸频率的不同,利用带通滤波器滤波将相位值进行滤波以进行区分。
- Spectral Estimation范围估计,对相位信号做FFT,依据峰值大小及其谐波特征,获取N个Frame时间内对应的呼吸频率。
- Decision判断,记录一段时间内的呼吸频率,根据不同的置信度指标判断此时的呼吸频率,并输出呼吸频率随时间变化的关系。
- 在对相位进行滤波后,此处的目的是减少人身体的相对位置移动而对心率测量造成的影响。(因为心率的测量是基于心脏收缩和舒张的微小运动产生的距离差,而引起的相位变化,依据微多普勒原理,当人的身体出现大幅摆动时,将会对其准确性造成影响)此处通过将样本进行分割,设置阈值去判断是否符合心率的变化范围,并选取稳定装态下的数据进行下一步的估计。
- 此处的方法与求呼吸频率类似,最终获得生命体征信号。
6 基于AWR 1642的应用实现
基于TI的AWR 1642 Demo板,经过建立工程、刷写、GUI等步骤即可实现其功能,GUI界面如下所示。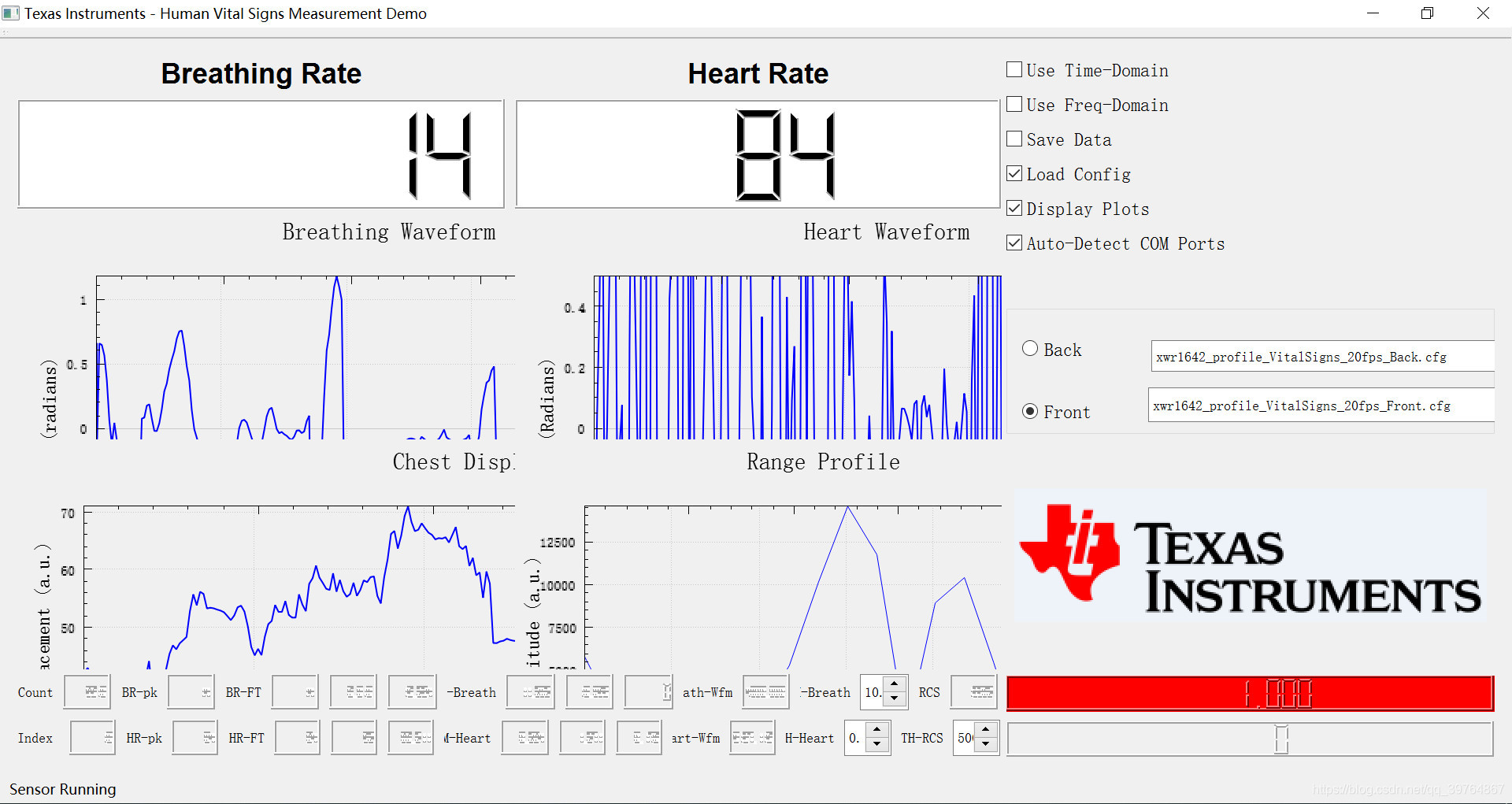

上述参考TI的官方指南《 TI mmWave Labs —— Driver Vital Signs》,如有需要,可私信。
本文内容由网友自发贡献,转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/536864
推荐阅读
相关标签

