
- 1工作去哪了?2023互联网IT行业还好吗?_2023it行业现状
- 2JAVA进入公司试用期多久_一般企业的试用期为多长时间
- 3JDBC使用流程--使用java代码完成连接mysql数据库并进行查询_java中jdbc连接数据库的查询方法
- 4PowerDesigner 连接 MySQL 并生成逆向工程图
- 5持之以恒(一)位姿转换:姿态 / 四元数 / 旋转矩阵 / 欧拉角 及 位姿矩阵_相机位姿旋转向量转欧拉角
- 6入职3个月的Java程序员面临转正,领导:1年工作经验包装成5年,试用期淘汰!_奇瑞java开发用期会刷人吗
- 7交通大模型专题汇总(2024-05-05更新)
- 8Anaconda 环境中安装OpenCV (cv2)_conda安装cv2_conda cv2
- 9本科,60k*13薪,外包到新疆!你会去吗?
- 10为什么学Python的人越来越多?Python有哪些优势?_python为什么用的人多
位姿估计之PnP算法
赞
踩
最近实验室学习安排是了解Pnp问题解法,于是就在网上找了各种文章学习,在此进行总结,给我卷!!!
1.什么是PnP问题?
PnP(全称Perspective-n-Points),指3D到2D点对的物体运动定位问题,即已知物体在世界坐标系下的坐标,以及物体在相机的图像平面的像素坐标,求解相机的位姿(六个自由度,位置坐标和三个方向角)。
2.PnP问题的可解性
知道了PnP问题后,就要讨论n在不同取值下的可解性了。
case1:
n=1时,也就是特征点只有一个的时候,假设特征点为p1,相机光心为Oc,假设特征点在图像正中间,即p1Oc为相机z轴,此时相机可能在以特征点p1为圆心,半径任意的球上任意一点,这是有无数解的,图示如下:

相机可能在球面O1、O2、O3上任意一点。
case2:
n=2时,假设两个特征点分别为p1和p2,相机光心为Oc,已知p1和p2的世界坐标,则可知距离p1p2,又知特征点的像素坐标,以及相机内参,可求出∠p1Ocp2的余弦值(如何求后面会说明),利用小孔成像模型(相似三角形)可求出其中一条边Ocp1=r1,再利用余弦定理求出另一条边Ocp2=r2,然后分别以p1和p2为圆心,r1和r2为半径画球面,两个球面相交的地方就是相机可能的位置,此时仍有无数解,图示如下:

两球面交界处是一片区域,相机可能在这片区域任意位置。
case3:
n=3时,在原有的基础上又增加了一个球面,这时相机就位于三个球面的交界处,此时交界处有四个点,即相机位置有四个可能解,其中一个是最优解;
case4:
n=4时,又增加了一个球面,暂时不考虑特殊情况,则四个球面相交于一点,即相机的位置。但由case3可知,在已知三个特征点的情况下,已经可以求出四个可能解,最优解就是四个解中的一个,而为了找出这个最优解又多找考虑一个特征点,对于计算效率方面是不划算的。基于此,通常实际应用中,我们选择用第四个特征点作为检验点,即分别从求出的四个可能解中计算出相机位姿,然后把第四个点经过重投影后计算误差,误差值最小(实际也不可能完全重合)的即为最优解。
到此,PnP问题的可解性暂且讨论完毕。
3.PnP问题求解及数学推导
3.1 DLT(Direct Linear Tranform,直接线性变换)
设一个空间特征点的世界坐标为Pw(X,Y,Z),其对应的像素坐标为p(u,v),列一下当前的条件,已知相机内参K(通过相机标定求得,而且内参不会随着物体运动而变),要求的是旋转矩阵R和平移矩阵t,有世界坐标->像素坐标转化可列如下方程(为了能表示为矩阵相乘的形式,简化运算,都转化为齐次坐标):

我上面写的这个公式忽略了尺度系数,其实它和内参K一样,后面都会被消去,这里提醒大家注意。
等号两边左乘K逆,同时定义变换矩阵T=[R|t],展开如下:

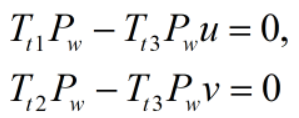
把K逆用第三行表示,代入前两行化简得到两个约束:

这里,定义变换矩阵T的行向量:
则上述两个约束方程可化为:
未知量是Tt,其它已知,一个特征点提供两个方程, 若有n个特征点,则方程如下: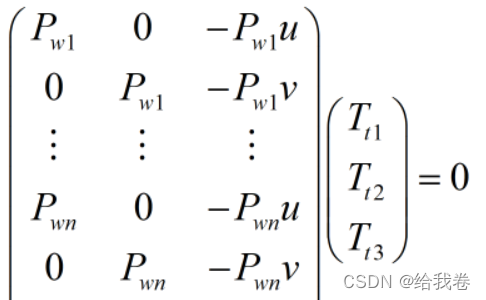
变换矩阵有12个参数,因此需要至少6对特征匹配点才能求出线性解,同时,若n>6时,方程数大于未知数,方程属于超定方程,可以利用SVD分解使用最小二乘法寻找近似最优解,求解过程暂不列出(有点复杂)参考如下:最小二乘法求解相机位姿。
3.2 P3P
已知空间中三个特征点,根据小孔成像模型可以简单表示如下:

图中A、B、C三点为空间特征点,在成像平面的对应投影点分别为a、b、c,O为相机光心,先讨论一下已知条件,A、B、C三点世界坐标已知,则可求出AB、BC、AC;a、b、c为像素坐标,也可求出ab、ac、bc,除此之外还能求出图中不易看出的∠aOb=α,∠aOc=β,∠bOc=γ的余弦值,至于如何求放到后面,先假设它们已知。
我们目的是什么呢?相机的位姿,也就是R和t,怎么求?很简单,就是先求出A、B、C三点在相机坐标系下的坐标,然后世界坐标->相机坐标的转换,即经过旋转R和平移t。这里我们可以看出3D-2D的点对运动问题被转化成了3D-3D的刚体变换,之后通过ICP(Iterative Closest Point)迭代最近点算法求解。之后可以看到EPnP求解也是3D->3D。
从上图中找出
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

