
热门标签
热门文章
- 1基于Python爬虫北京景点数据可视化系统设计与实现(Django框架) 研究背景与意义、国内外研究现状
- 2Python SNMP 获取交换机ARP表和FDB表(MAC和端口对应表)_mac vlan 端口 表 python snmp
- 3MySQL 索引_查询表字段含义 show
- 427个Python数据科学库,千万不要错过!!
- 5C#使用iText7将多个PDF文档合并为单个文档
- 6Unity Editor 知识点整理 (编辑器模式下获取鼠标位置和场景信息)_unity4.7 在editor模式下打开场景并修改保存
- 7基于Matlab的激光雷达与单目摄像头联合外参标定_matlab联合标定
- 8JAVA300第四章作业_3、编写 java 程序,用于显示人的姓名和年龄。定义一个学生类student。 该类中应该
- 9scrcons.exe浏览器快捷方式被劫持的解决方法
- 10vue-百度地图自动获取定位_vue百度地图定位
当前位置: article > 正文
Nerf-SLAM浅总结
作者:小蓝xlanll | 2024-02-23 11:17:34
赞
踩
nerf-slam
- Nerf:NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
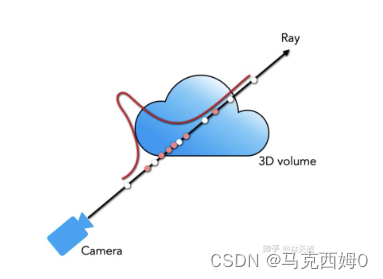
是一个MLP网络,模型的输入是x,y,z,和两个维度的角度信息,输出是rgb颜色信息和密度信息。用神经辐射场来表示三维的信息。然后由三维的信息可以转换成为被任意姿态观测的二维图像,这个过程称为渲染,渲染的方式与经典的volume rendering 方式类似,通过对射线进行分段随机采样,预测出颜色信息。
训练使用颜色作为残差项

- Nerf-SLAM:Real-Time Dense Monocular SLAM with Neural Radiance Fields
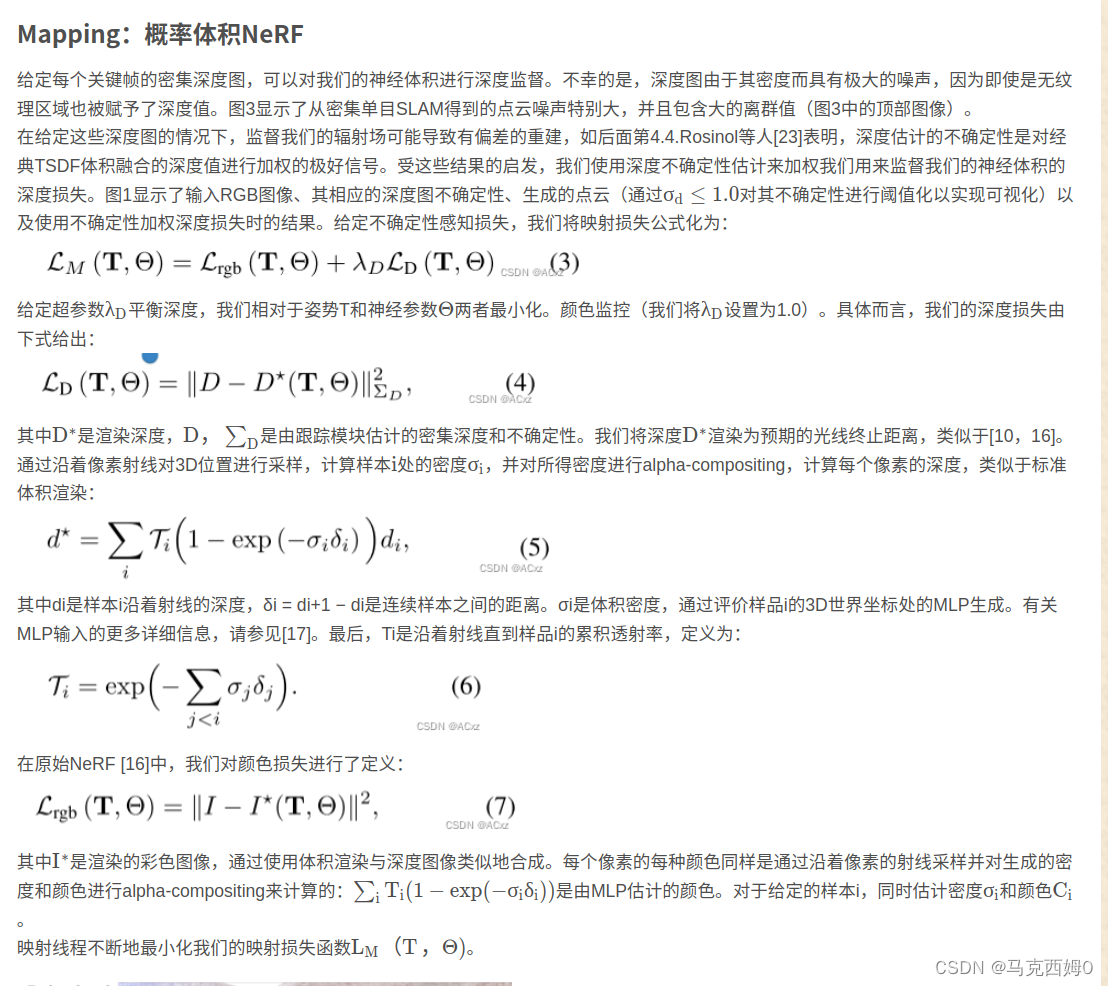
本文使用了Droid-SLAM,稠密的光流估计,也估计出了深度的不确定度。把深度图,深度的不确定度和相机位姿输入到NeRF网络里进行监督(残差引入了深度)。一个线程用来跟踪,另一个线程用来监督和渲染。本文称可以实时运行。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/136025?site
推荐阅读
相关标签

