
热门标签
热门文章
- 1腾讯云网络云产品介绍第三章-负载均衡服务_腾讯云 弹性负载均衡
- 2Mac M1/M2 安装Tensorflow教程_mac在已经创建好的环境上如何再安装tensorflow
- 3vue回调函数中调用data中的数据的解决方法_vuedata调用data里面数据
- 4[刷机] 9008 刷机救砖笔记
- 5Kotlin 协程:深入理解 ‘lifecycleScope‘_kotlin lifecyclescope
- 6IDEA项目如何上传至GitHub(保姆级教程)_idea怎么上传github
- 71235813找规律第100个数_数学基础知识点类总结,解题规律典型应用题可收藏
- 8使用TortoiseGit如何回退代码版本_tortoisegit回退到指定版本
- 9ARM架构下部署docker_dockerarm 18.09.0.200 版本下载
- 10神经网络与深度学习(一)_神经网络 各模块贡献度分析
当前位置: article > 正文
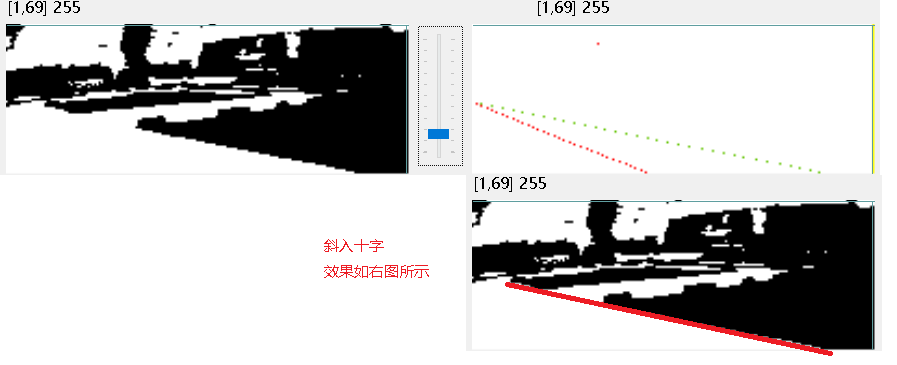
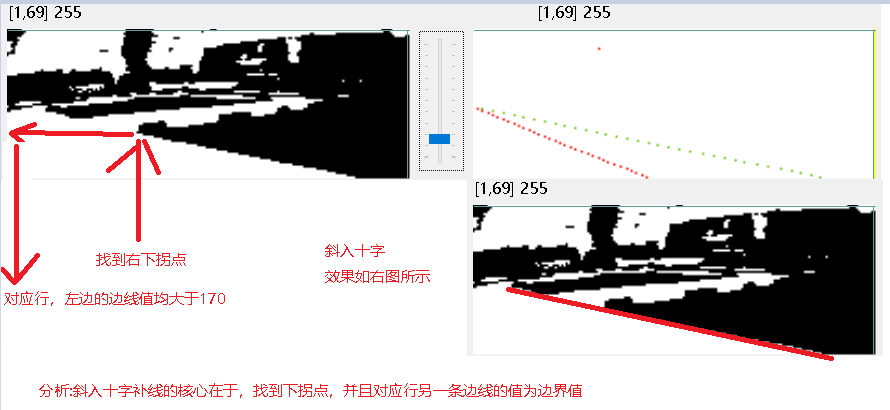
智能车图像处理19-进阶篇11--斜入十字补线_智能车摄像头补线
作者:小蓝xlanll | 2024-04-16 16:30:11
赞
踩
智能车摄像头补线
前言
希望大家多多点赞评论收藏哦,不懂的地方评论区留言就好。
这篇文章主要讲述智能车竞赛中如何对于斜入十字进行补线操作。
思路分析
一、核心代码
//斜十字补线开始:4
int bigup=0;
void buzhongxian4()//限制斜率
{
firstmid = 0- 1
- 2
- 3
- 4
- 5
推荐阅读
相关标签

