
热门标签
热门文章
- 1git 创建group_gitlab新建用户、组、分支以及为项目分配相应权限
- 2golang适配GBase8s(南大通用)数据库_gorm 适配南大通用
- 3Coze在手,GPTs&DALLE免费用_coze账户
- 4TCP 连接状态及相关命令学习_network tcp connection state
- 5理解维度数据仓库——事实表、维度表、聚合表_数据仓库 维度 事实 指标 汇总概念
- 6【Hive】SQL 数据结构 & 常用函数_hive tostring
- 7连接web3出现不是构造constructor错误 const web3 = new Web3(ethereumNodeUrl);TypeError:Web3 is not a constructor_typeerror: web3 is not a constructor
- 8AndroidStudio升级Gradle之坑_android studio grade报错
- 9基于FPGA的数字信号处理(9)--定点数据的两种溢出处理模式:饱和(Saturate)和绕回(Wrap)_数据截位的溢出模式,wrap around方式
- 10【DevOps】深入理解 Nginx Location 块:配置示例与应用场景详解
当前位置: article > 正文
树莓派学习2--串口收发_树莓派串口接受相应信号执行相应函数
作者:小蓝xlanll | 2024-06-08 08:33:17
赞
踩
树莓派串口接受相应信号执行相应函数
树莓派学习–串口收发
wiringPi库
wiringPi是一个很棒的树莓派IO控制库,使用C语言开发,提供了丰富的接口:GPIO控制,中断,多线程,等等
我们可以通过以下命令查看wiringPi信息
gpio -v
- 1
如果没有则需要安装
sudo apt-get install wiringpi
- 1
以下是树莓派3b的引脚图
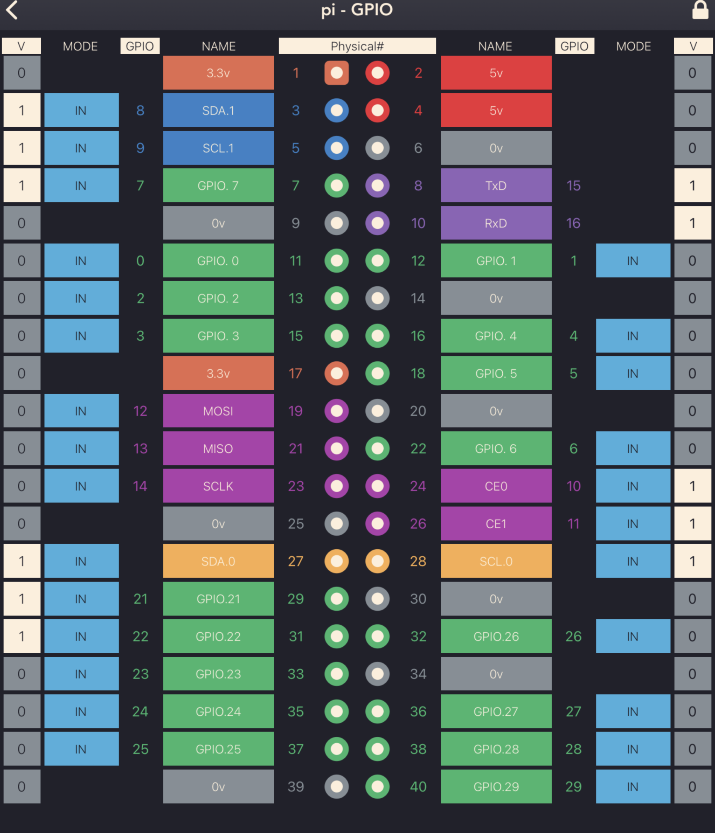
上图显示的是物理引脚编号和wiring库编号,我们可通过输入gpio readall来查看IO口状态
wiringpi库函数介绍
硬件初始化函数
使用wiringPi时,你必须在执行任何操作前初始化树莓派:
| int wiringPiSetup (void) | 返回:执行状态,-1表示失败 | 当使用这个函数初始化树莓派引脚时,程序使用的是wiringPi 引脚编号表。引脚的编号为 0~16,需要root权限 |
|---|---|---|
| int wiringPiSetupGpio (void) | 返回执行状态,-1表示失败 | 当使用这个函数初始化树莓派引脚时,程序中使用的是BCM GPIO 引脚编号表。 |
| wiringPiSetupPhys(void) | 不常用,不做介绍 | / |
| wiringPiSetupSys (void) ; | 不常用,不做介绍 | / |
串口通信函数
| int serialOpen (char *device, int baud) | device:串口的地址,在Linux中就是设备所在的目录。默认一般是"/dev/ttyAMA0",我的是这样的。 baud:波特率返回:正常返回文件描述符,否则返回-1失败。 | 打开并初始串口 |
|---|---|---|
| void serialClose (int fd) | fd:文件描述符 | 关闭fd关联的串口 |
| void serialPutchar (int fd, unsigned char c) | fd:文件描述符c:要发送的数据 | 发送一个字节的数据到串口 |
| void serialPuts (int fd, char *s) | fd:文件描述符s:发送的字符串,字符串要以’\0’结尾 | 发送一个字符串到串口 |
| void serialPrintf (int fd, char *message, …) | fd:文件描述符message:格式化的字符串 | 像使用C语言中的printf一样发送数据到串口 |
| int serialDataAvail (int fd) | fd:文件描述符返回:串口缓存中已经接收的,可读取的字节数,-1代表错误 | 获取串口缓存中可用的字节数。 |
| int serialGetchar (int fd) | fd:文件描述符返回:读取到的字符 | 从串口读取一个字节数据返回。如果串口缓存中没有可用的数据,则会等待10秒,如果10后还有没,返回-1所以,在读取前,做好通过serialDataAvail判断下。 |
| void serialFlush (int fd) | fd:文件描述符 | 刷新,清空串口缓冲中的所有可用的数据。 |
| *size_t write (int fd,const void * buf,size_t count) | fd:文件描述符buf:需要发送的数据缓存数组count:发送buf中的前count个字节数据返回:实际写入的字符数,错误返回-1 | 这个是Linux下的标准IO库函数,需要包含头文件#include <unistd.h>当要发送到的数据量过大时,wiringPi建议使用这个函数。 |
| *size_t read(int fd,void * buf ,size_t count); | fd:文件描述符buf:接受的数据缓存的数组count:接收的字节数.返回:实际读取的字符数。 | 这个是Linux下的标准IO库函数,需要包含头文件#include <unistd.h>当要接收的数据量过大时,wiringPi建议使用这个函数。 |
串口配置修改
在串口通信前,我们还要配置树莓派/boot/cmdline.txt
sudo vi /boot/cmdline.txt
- 1
删掉console=…,115200
dwc_otg.lpm_enable=0 console=tty1 console=serial0,115200 root=/dev/mmcblk0p2 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait
改完后reboot重启
串口发送和接受
测试代码:
#include <wiringPi.h> #include <wiringSerial.h> #include <stdio.h> #include <stdlib.h> #include <string.h> int main() { int fd; wiringPiSetup(); //初始化树莓派引脚 char cmd; char *str; str=(char*)malloc(1024); fd=serialOpen("/dev/ttyAMA0",9600); //打开并初始串口 while(1){ // serialPutchar(fd,'c'); // serialPuts(fd,"aaaaaaaaa\r\n"); while(serialDataAvail(fd)<=0); //获取串口缓存中可用的字节数 cmd = serialGetchar(fd); //从串口读取一个字节数据返回 // memset(str,0,1024); // sprintf(str,"get cmd:%c\r\n",cmd); // serialPuts(fd,str); //发送一个字符串到串口 printf("get data:cmd=%c\n",cmd); serialPrintf (fd, "get cmd:%c\r\n", cmd); //发送数据到串口 if(cmd=='q'){ serialPuts(fd,"quit\r\n"); printf("quit\n"); break; } // delayMicroseconds(1000000); } free(str); serialClose(fd); //关闭fd关联的串口 return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
gcc demo.c -lwiringPi
- 1
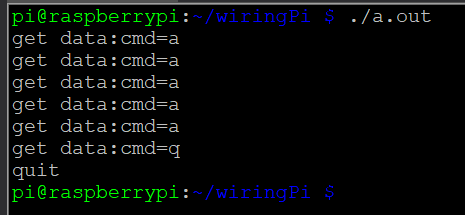
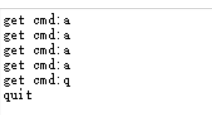
运行结果
字符串收发
#include <wiringPi.h> #include <wiringSerial.h> #include <stdio.h> #include <stdlib.h> #include <string.h> #include <unistd.h> int main() { int fd; char cmd[128]={'\0'}; int n_read; wiringPiSetup(); fd=serialOpen("/dev/ttyAMA0",9600); while(1){ while(serialDataAvail(fd)<=0); n_read=read(fd,cmd,sizeof(cmd)); printf("cmd:%s\n",cmd); if(strstr(cmd,"quit")!=NULL){ printf("quit\n"); serialPrintf (fd, "get cmd:%s\r\n", cmd); break; } memset(cmd,'\0',sizeof(cmd)); } serialClose(fd); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
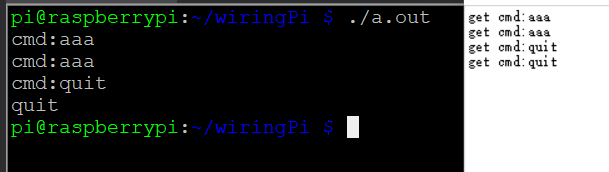
运行结果:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/689139
推荐阅读
相关标签

