
- 1Set a Light 3D Studio:探索光影艺术的全新维度mac/win中文版
- 27. 飞书机器人发送交互式信息_飞书交互式机器人卡片
- 3华为USG6000v
- 4无代理方式的网络准入技术:保护泛终端企业网络安全的未来
- 5RVC使用指南(四)-集群状况_rvcio
- 6安全远控如何设置?揭秘ToDesk、TeamViewer 、向日葵安全远程防御大招_todesk电脑远程控制怎么开启隐私屏
- 7Oracle Form开发之folder(文件夹)功能开发(二)_frm 40106
- 8AiSQL特性在特定业务场景下的应用_ai sql
- 9图文匹配 + 图像分类 = 统一多模态对比学习框架
- 10开启微软 Outlook 邮箱 POP, IMAP, SMTP 服务和获取服务密码(授权码)_imap/pop密码
fast_bev 学习笔记
赞
踩
一. 简述
原文:Fast-BEV: A Fast and Strong Bird’s-Eye View Perception Baseline
FAST BEV是一种高性能、快速推理和部署友好的解决方案,专为自动驾驶车载芯片设计。该框架主要包括以下五个部分:
Fast-Ray变换:这是一种轻量级的、部署友好的视图变换,它将多视图2D图像特征沿着相机射线的体素投影到3D,从而快速获得BEV(鸟瞰图)表示。相较于传统方法,这种变换方式显著提升了推理速度,使得多尺度投影操作变得更为高效和实用。
多尺度图像编码器:利用多尺度信息来获取更好的性能。通过多尺度投影操作,编码器能够充分利用不同尺度的图像特征,从而增强BEV感知的准确性和鲁棒性。
高效BEV编码器:专为加速车载推理而设计。通过使用少量的原始残差网络作为基本BEV编码器,该部分能够在保证性能的同时,进一步降低计算复杂度和推理时间。
数据增强:针对图像和BEV空间的强大数据增强策略,以避免过度拟合。通过引入各种数据变换和增强技术,可以提高模型的泛化能力,使其在面对不同场景和复杂环境时仍能保持良好的性能。
时间融合:利用时间信息的多帧特征融合机制。通过融合多帧图像的特征信息,该部分能够捕捉动态场景中物体的运动轨迹和状态变化,从而进一步提升BEV感知的准确性和实时性。
FAST BEV的优势在于其能够在保证高性能的同时,实现快速推理和方便部署。这使得它成为自动驾驶车载芯片上一种理想的解决方案。此外,相较于传统方法,FAST BEV无需使用昂贵的视图变换器或深度表示,从而降低了硬件成本和维护难度。
综上所述,FAST BEV通过优化视图变换、编码器设计、数据增强和时间融合等方面,实现了高性能、快速推理和部署友好的自动驾驶解决方案。随着自动驾驶技术的不断发展,FAST BEV有望在未来发挥更大的作用。
二. 输入输出
FAST BEV的输入主要是多相机RGB图像,
输出则是预测的3D边界框(包括速度)和地图分割结果。
通过一系列的处理步骤,如Fast-Ray变换、多尺度图像编码、高效BEV编码等,对输入的RGB图像进行特征提取、视图变换和编码,最终输出3D边界框和地图分割结果。
三. github资源
源码: https://github.com/Sense-GVT/Fast-BEV
使用CUDA和TensorRT进行Fast-BEV推理: https://github.com/Mandylove1993/CUDA-FastBEV
https://github.com/linClubs/FastBEV-ROS-TensorRT
Fast-BEV代码复现实践: https://blog.csdn.net/h904798869/article/details/130317240
Fast Bev在ubuntu上的复现过程以及error汇总: https://blog.csdn.net/qq_42704750/article/details/130280567
复现教程1 : https://zhuanlan.zhihu.com/p/631504194
四. 复现推理过程
4.1 cuda tensorrt 版
参考链接:https://github.com/Mandylove1993/CUDA-FastBEV
提供了PTQ和QAT的int8量化代码,
PTQ (Post-Training Quantization)是在模型训练完成后进行的量化,通过分析训练好的模型的权重和激活的分布来确定量化参数(如缩放因子和零点偏移)。
QAT(Quantization Aware Training)通过在训练过程中模拟量化操作来优化模型的权重,以减少量化带来的精度损失。
int8量化代码: 将模型的权重从浮点数转换为int8。在推理过程中,将模型的激活从浮点数转换为int8。在计算层输出时,将int8值转换回浮点数以便进行后续计算。
问题1:
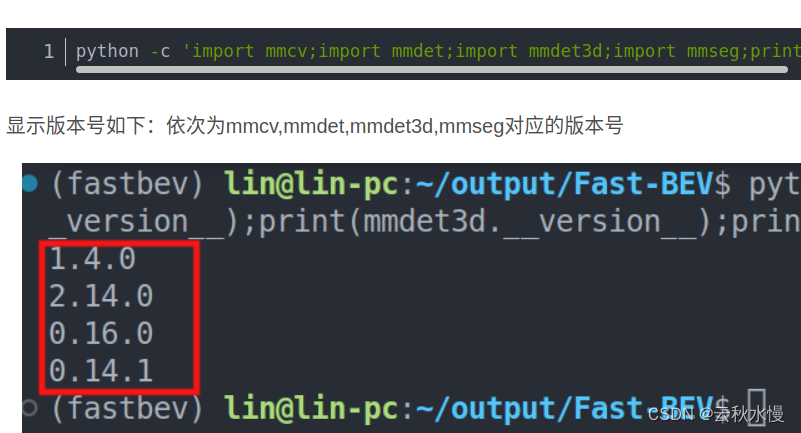
安装mmcv mmdet mmdet3d 参考:https://blog.csdn.net/h904798869/article/details/130317240版本如下:
问题2:
安装spconv:
pip install torch==1.10.0+cu113 torchvision==0.11.0+cu113 torchaudio==0.10.0 -f https://download.pytorch.org/whl/torch_stable.html
git clone https://github.com/traveller59/spconv.git
cd spconv
git checkout v1.2.1
git submodule update --init --recursive
python setup.py bdist_wheel
cd ./dist
pip install spconv-.....
python
import spconv
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
问题:https://blog.51cto.com/u_15906550/5921374
训练
https://blog.csdn.net/yunqiushuiman/article/details/136537614
https://zhuanlan.zhihu.com/p/627783225

