
热门标签
热门文章
- 1【Git 小妙招】学习多人协作场景(万字图文讲解+实战练习)_git多人协作
- 2椭圆曲线密码算术(ECC)原理_ecc椭圆曲线为什么不是椭圆?
- 3MLM之CogVLM2:CogVLM2(基于Llama-3-8B-Instruct 模型进行微调)的简介、安装和使用方法、案例应用之详细攻略_cogvlm2微调
- 4redis.clients.jedis.exceptions.JedisDataException: ERR unknown command ' config '_caused by: redis.clients.jedis.exceptions.jedisdat
- 5python readline_readline() python是什么? readline() python定义及用法解析
- 62020年金属非金属矿山(小型露天采石场)安全管理人员考试题及金属非金属矿山(小型露天采石场)安全管理人员多少钱
- 7Python学习笔记合集(Pyhton基础总结)_python学霸笔记
- 8前端使用MD5
- 9linux clock()_【ZYNQ实战】利用AXI Quad SPI快速打通Linux至PL端SPI从设备
- 10填表统计预约打卡表单系统(FastAdmin+ThinkPHP+UniApp)
当前位置: article > 正文
扩展卡尔曼滤波算法与互补滤波算法关于姿态信息解算对比_互补滤波器和卡尔曼滤波器
作者:我家自动化 | 2024-06-22 00:38:37
赞
踩
互补滤波器和卡尔曼滤波器
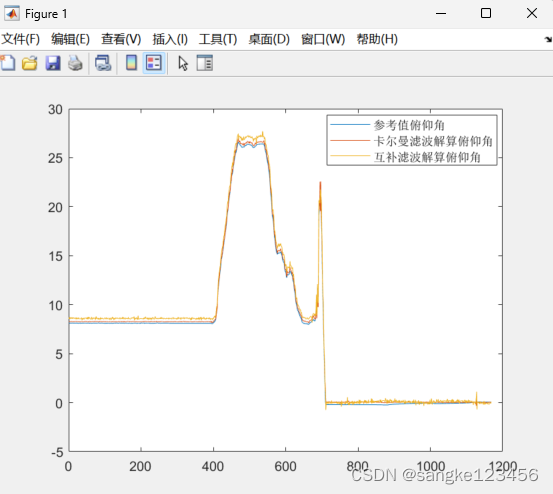
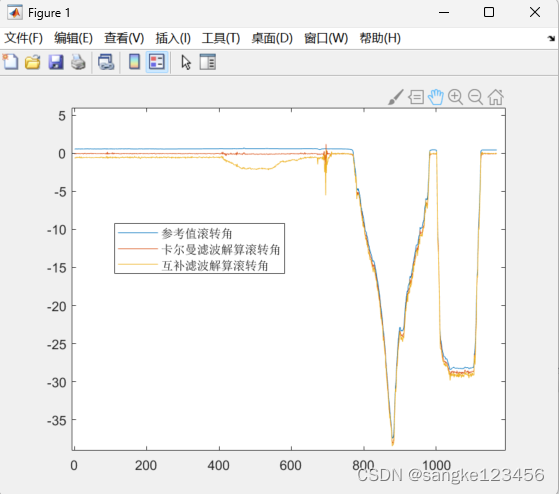
最近针对扩展卡尔曼滤波和互补滤波二者关于姿态解算进行学习,在仿真结果发现二者基本上相差不是很大,保持在0-1度误差范围之内,由于传感器也是不同型号的,二者算法好坏不做评价。但针对过程变化时可以发现,互补滤波有相应的变化。
扩展卡尔曼滤波算法与互补滤波算法关于姿态信息解算对比如下
声明:本文内容由网友自发贡献,转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

