
- 1Redis-Service.Stack的初级使用
- 2【Kerberos-KafkaTool】在大数据Kerberos认证下使用KafkaTool工具_kafka 连接工具
- 3Milvus向量数据库基础用法及注意细节_pymilvus
- 4深入测评:ONLYOFFICE 8.1版本桌面编辑器的强大功能与优越体验
- 5LLM Agent 全网最全简介_agent llm
- 6解决跨域 报错Access to XMLHttpRequest at ‘http://127.0.0.1:3001/user‘ from origin ‘http://127.0.0.1:5501‘
- 7持续集成(Continuous Integration)
- 8android 重写RadioButton_android extends radiobutton
- 9springboot/java/php/node/python贴吧管理系统【计算机毕设】
- 10OpenCV 棋盘格角点探测
MATLAB仿真UR5机器人:Simulink与Simscape自制建模的正向与逆向运动学、关节轨迹规划(五次多项式与笛卡尔空间)及直线插补比较_机器人运动学仿真与轨迹规划
赞
踩
MATLAB仿真UR5机器人simulink simscape 自制建模
正向运动学,逆向运动学
关节空间轨迹规划 五次多项式轨迹规划
笛卡尔空间轨迹规划 直线插补
还包含机器人工具箱建立的模型对比
ID:73149667406909214
爱小马的海盐大傻


在控制机器人运动中,运动学是一个重要的概念。它描述了机器人的位置、速度和加速度之间的相互关系。在本文中,将重点介绍MATLAB仿真UR5机器人的运动学建模,并使用Simulink和Simscape工具进行仿真。
首先,我们需要了解UR5机器人的结构和运动学。UR5是一种6自由度的机器人,具有6个关节。每个关节的旋转运动可以通过关节角度来描述。机器人的末端执行器可以在笛卡尔空间中进行直线运动。
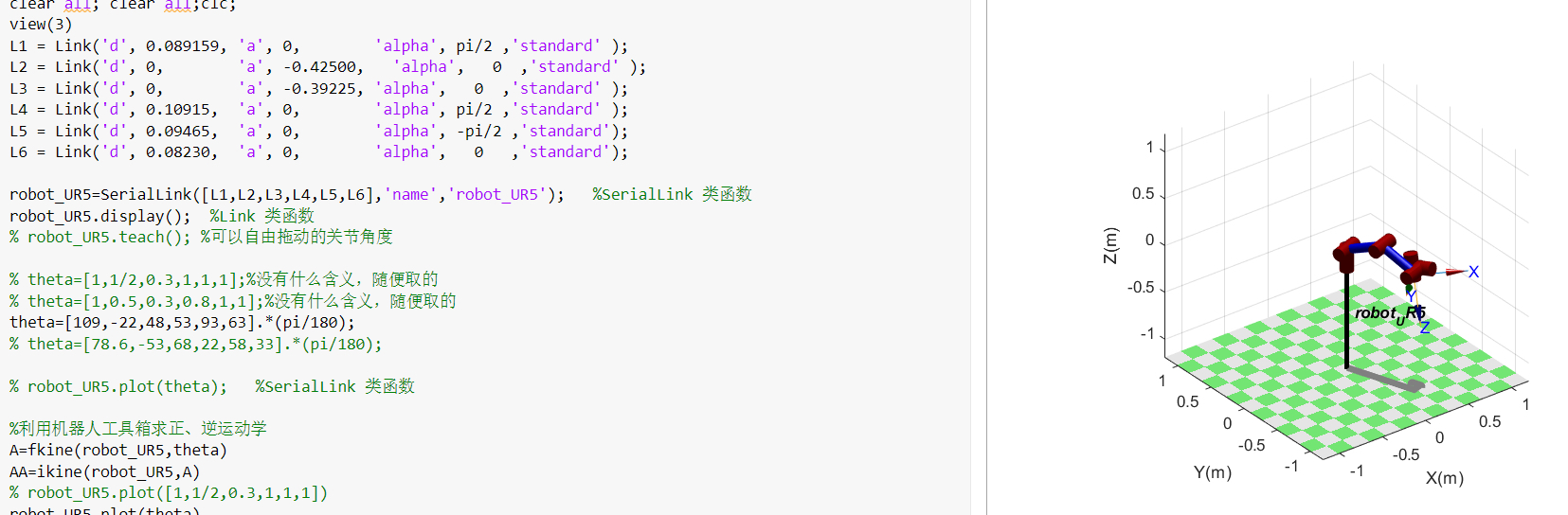
为了进行运动学建模,我们首先需要创建机器人的模型。在MATLAB中,可以使用机器人工具箱来实现这一点。该工具箱提供了一系列函数和类,用于创建机器人模型、计算正向运动学和逆向运动学等操作。
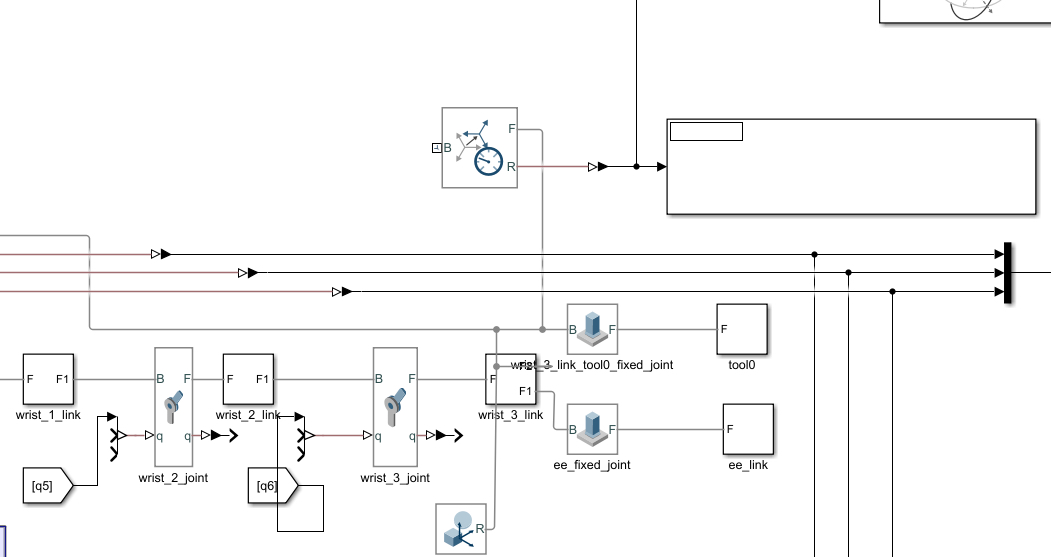
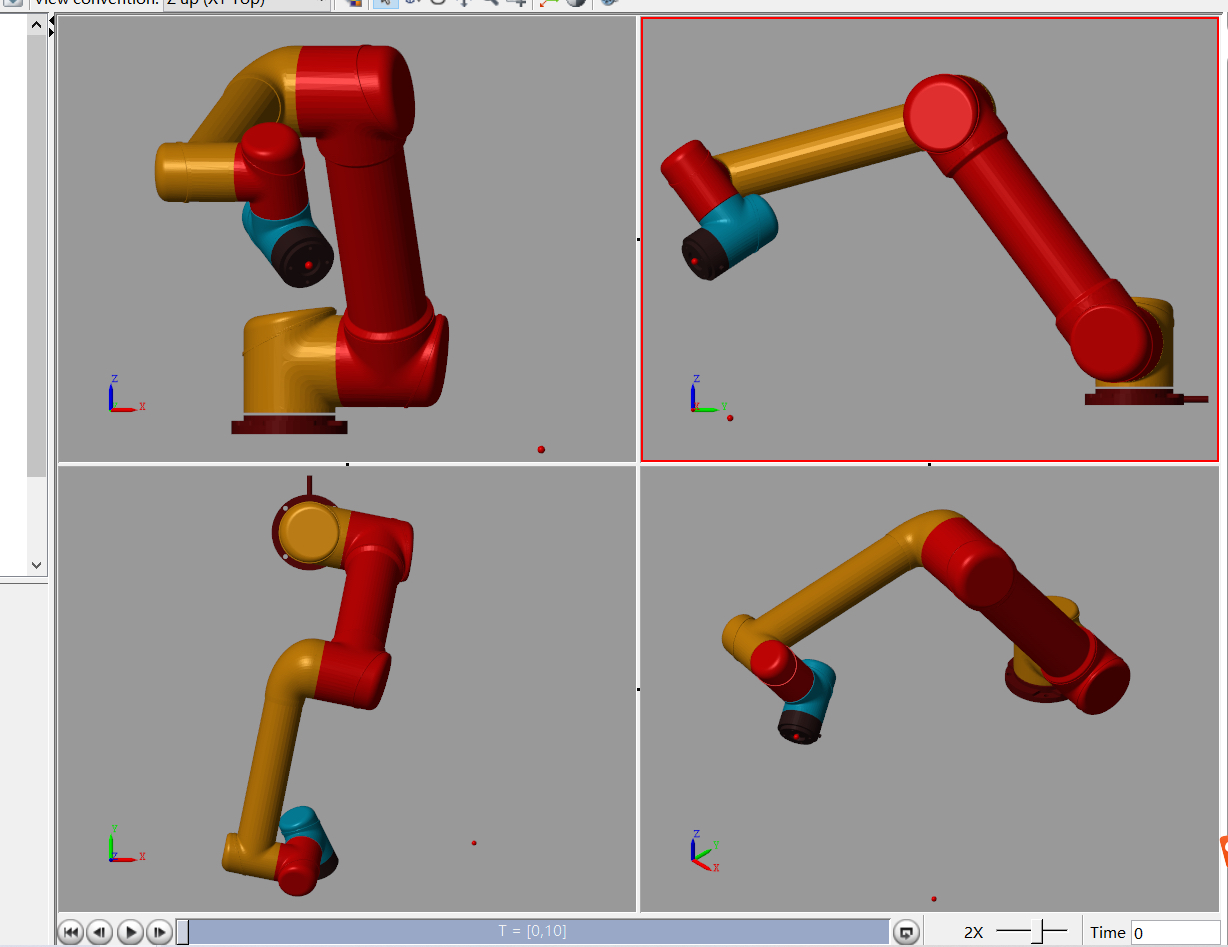
在Simulink中,我们可以使用Simscape工具箱来构建机器人的模型。Simscape是一种基于物理建模的仿真工具,可以帮助我们更好地理解机器人的运动学。
在正向运动学中,我们可以通过已知关节角度来计算机器人的末端执行器位置。这可以通过计算每个关节的旋转变换矩阵来实现。这些变换矩阵可以以连乘的方式组合,得到机器人的末端执行器位置。
在逆向运动学中,我们可以通过已知末端执行器位置来计算关节角度。这需要解决一个逆向运动学问题,通常是一个非线性方程组。在MATLAB中,可以使用数值解法来解决这个问题。
一旦我们建立了机器人的模型并进行了运动学分析,下一步就是进行轨迹规划。在关节空间中,我们可以通过规划关节角度的变化来控制机器人的运动。这可以通过多项式轨迹规划实现,其中五次多项式是一种常用的方法。
在笛卡尔空间中,我们可以通过规划末端执行器的位置来控制机器人的运动。这可以通过直线插补的方式实现,即在给定的起点和终点之间插入一系列的中间点,使得机器人的末端执行器沿着直线轨迹移动。
最后,我们可以对比不同的机器人模型和轨迹规划方法。通过对比实验结果,我们可以评估不同方法的性能和适用性,并选择最合适的方法来控制机器人的运动。
总结起来,本文主要介绍了MATLAB仿真UR5机器人的运动学建模。我们使用Simulink和Simscape工具进行了仿真,并讨论了正向运动学、逆向运动学、关节空间轨迹规划和笛卡尔空间轨迹规划等内容。最后,通过对比实验结果,我们可以选择最适合的方法来控制机器人的运动。
以上相关代码,程序地址:http://matup.cn/667406909214.html

