
热门标签
热门文章
- 1windows安装cuda_cuda版本选择
- 2Hadoop的安装与伪分布式学习_安装与配置hadoop分布式环境。可以选择本机安装虚拟机,或者完成头歌在线实训
- 3iphone手机 ios系统 无法更新app 跳转到AppStore 显示 打开_苹果手机软件提示升级但点开是打开
- 4MSTP笔记_对于mstp设备来说,服务层路径是存在于网管侧的路径,而客户层路径是存在于网元侧的
- 5nvidia-smi 无进程占用GPU,但GPU显存却被占用_gpu用户只占用4g,但是nvidia-smi显示占用显存用了6g
- 6「雕爷学编程」Arduino动手做(32)——雨滴传感器模块_雨滴传感器代码
- 7Docker中安装Gitlab详细全教程_docker安装gitlab
- 8区块链安全初探(二):区块链的层次
- 9【LeetCode】单链表——刷题
- 102022年最新版Android安卓面试题+答案精选(每日20题,持续更新中)【三】_安卓数据库交互面试
当前位置: article > 正文
ubuntu20.04上获取Livox Avia雷达点云数据_ros获取livox 雷达数据
作者:盐析白兔 | 2024-04-24 21:12:32
赞
踩
ros获取livox 雷达数据
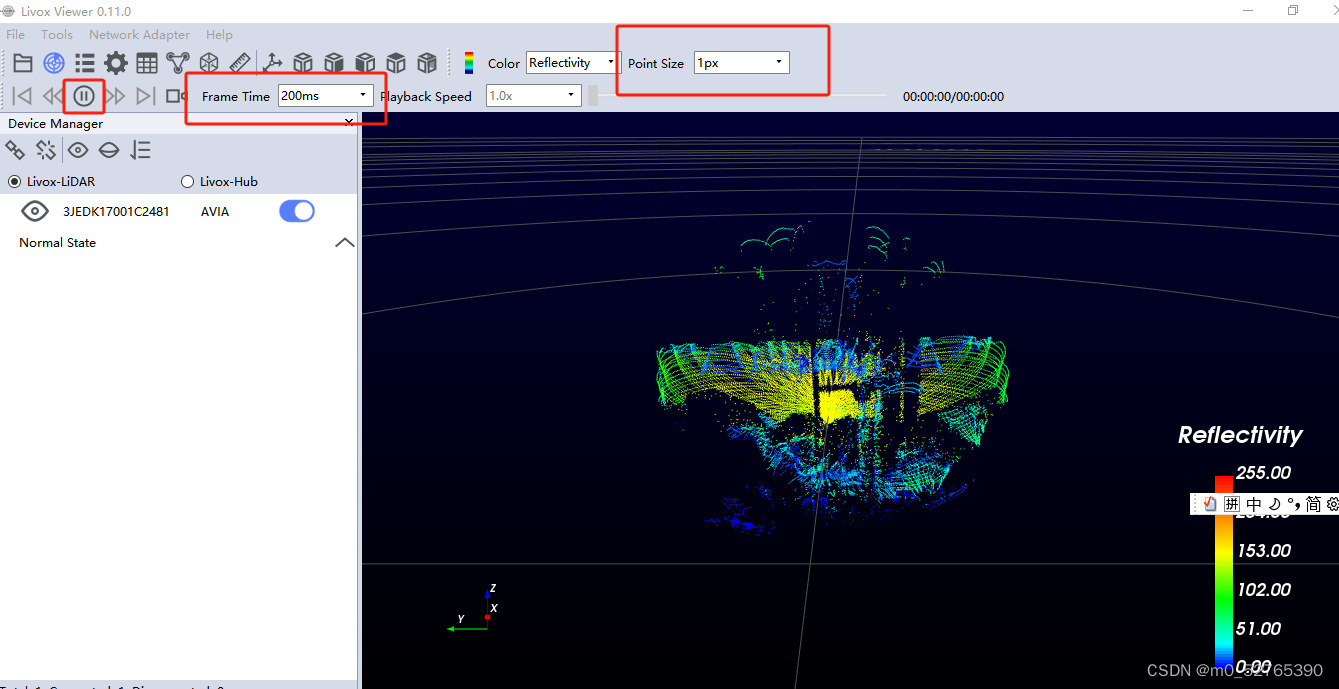
若拿到手的Livox Avia激光雷达不知道它的ip信息,可以在官网上LiDAR Sensors - Livox下载上位机软件Livox Viewer,查看IP,下载window版本就可以。雷达通过网线连上电脑后,该软件就可以自动识别出来。按照下图步骤,就可以看到激光雷达的现在ip了。为了实现和激光雷达的通信,与它通信的设备的ip 应该改为同一网段。(可以ping来验证)

在这个软件下的激光雷达的效果图:
一、前期准备
1.1创建工作空间
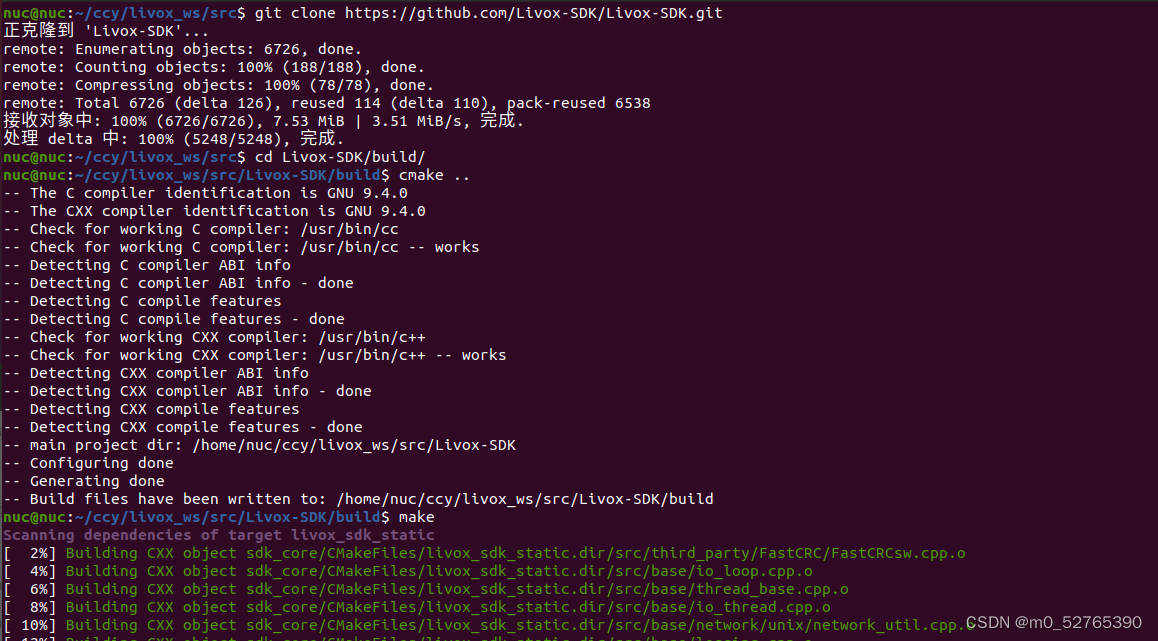
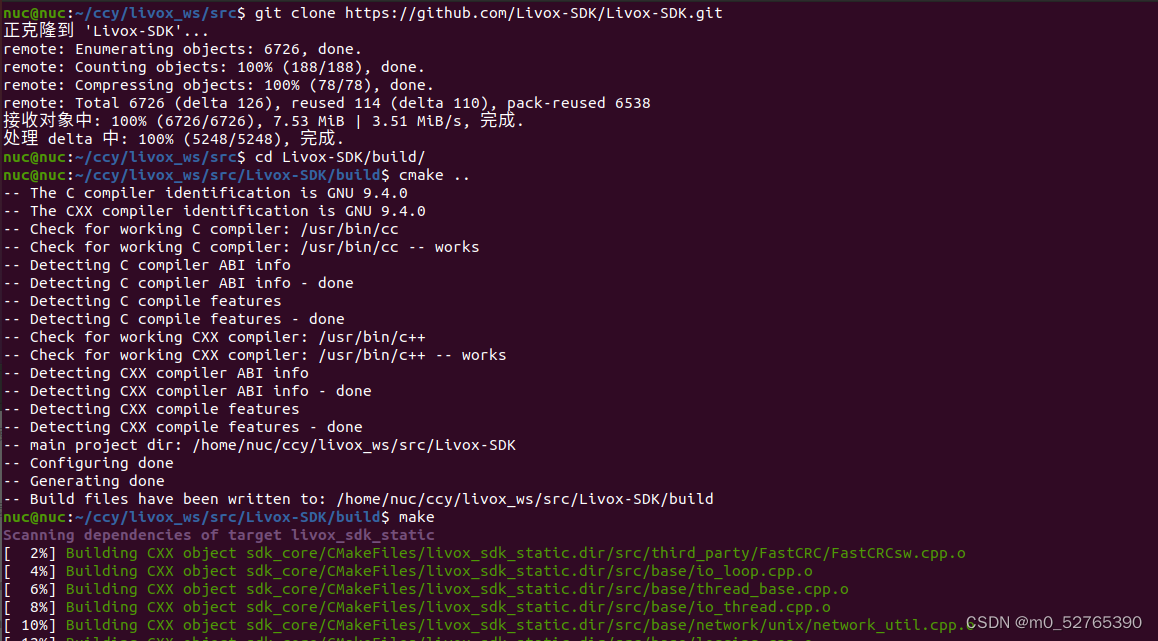
1.2 安装Livox-SDK
在工作空间的src目录下:
(1)clone Livox-SDK源码
git clone https://github.com/Livox-SDK/Livox-SDK.git(2) 依次运行以下命令
- cd Livox-SDK/build/
- cmake
- make
- sudo make install

(3)验证安装SDK有无问题
在build目录下:
cd sample/lidar && ./lidar_sample 输出下面语句,证明sdk安装无误。
输出下面语句,证明sdk安装无误。
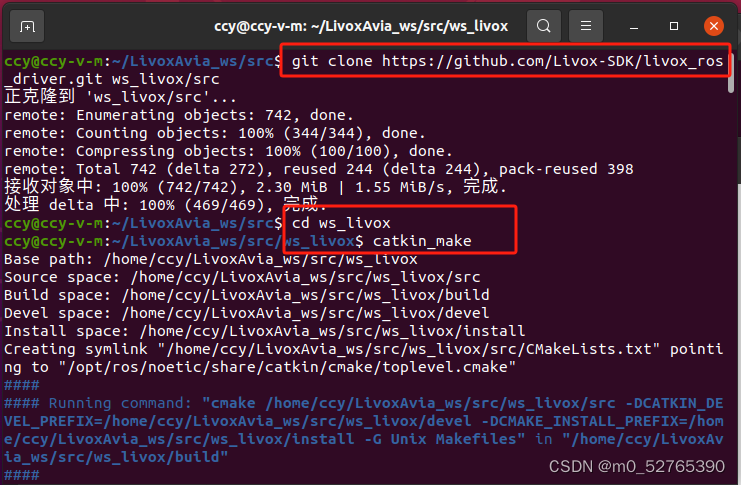
1.3 安装livox_ros_driver
(1)在工作空间的src目录下,依次运行:
- git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
- cd ws_livox
- catkin_make
- source ./devel/setup.sh
 (2)运行览沃 ROS 驱动程序
(2)运行览沃 ROS 驱动程序

上图中的.launch文件都可以运行。举例如下:
(1)运行ivox_ros_driver livox_lidar_rviz.launch
roslaunch livox_ros_driver livox_lidar_rviz.launch
 运行ivox_ros_driver livox_lidar_rviz.launch生成的点云只显示在椭圆中。
运行ivox_ros_driver livox_lidar_rviz.launch生成的点云只显示在椭圆中。
(2)运行 livox_lidar.launch
- source devel/setup.bash
- roslaunch livox_ros_driver livox_lidar.launch
运行上述launch文件后,再打开一个 terminal ,运行
rviz
在打开的rviz界面中,Add 中选择PointCloud2, 更改PointCloud2下的Topic:/livox/lidar,再更改上方Global Options下的 Fixed Frame: livox_frame

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/盐析白兔/article/detail/481573
推荐阅读
相关标签

